
Mechanism Design for Efficient Offline and Online Allocation of Electric Vehicles to Charging Stations
by
 ,
,
Emmanouil S. Rigas
1,* ,
,
Enrico H. Gerding
2,
Sebastian Stein
2,
Sarvapali D. Ramchurn
2 and
Nick Bassiliades
1 1
School of Informatics, Aristotle University of Thessaloniki, 54124 Thessaloniki, Greece
2
Electronics and Computer Science, University of Southampton, Southampton SO17 1BJ, UK
*
Author to whom correspondence should be addressed.
Energies 2022, 15(5), 1660; https://doi.org/10.3390/en15051660
Submission received: 7 January 2022
/
Revised: 9 February 2022
/
Accepted: 20 February 2022
/
Published: 23 February 2022
(This article belongs to the Special Issue Markets and Distributed Resources for Modern Power Systems)
Abstract
:The industry related to electric vehicles (EVs) has seen a substantial increase in recent years, as such vehicles have the ability to significantly reduce total CO emissions and the related global warming effect. In this paper, we focus on the problem of allocating EVs to charging stations, scheduling and pricing their charging. Specifically, we developed a Mixed Integer Program (MIP) which executes offline and optimally allocates EVs to charging stations. On top, we propose two alternative mechanisms to price the electricity the EVs charge. The first mechanism is a typical fixed-price one, while the second is a variation of the Vickrey–Clark–Groves (VCG) mechanism. We also developed online solutions that incrementally call the MIP-based algorithm and solve it for branches of EVs. In all cases, the EVs’ aim is to minimize the price to pay and the impact on their driving schedule, acting as self-interested agents. We conducted a thorough empirical evaluation of our mechanisms and we observed that they had satisfactory scalability. Additionally, the VCG mechanism achieved an up to improvement in terms of the number of vehicles that were charged compared to the fixed-price one and, in cases where the stations were congested, it calculated higher prices for the EVs and provided a higher profit for the stations, but lower utility to the EVs. However, in a theoretical evaluation, we proved that the variant of the VCG mechanism being proposed in this paper still guaranteed truthful reporting of the EVs’ preferences. In contrast, the fixed-price one was found to be vulnerable to agents’ strategic behavior as non-truthful EVs can charge instead of truthful ones. Finally, we observed the online algorithms to be, on average, at of the offline ones in terms of the average number of serviced EVs.
1. Introduction
The unprecedented change in the earth’s climate has made evident the need to shift to technologies that produce low or zero carbon emissions. The transportation sector is one of the main pollutants and its electrification is expected to significantly help in reducing global CO emissions [1]. In this vein, the electric vehicle (EV) sector is evolving rapidly. Indeed, several car manufacturers have set ambitious plans to terminate the production of non-electric vehicles by the end of the current decade. At the same time, the charging infrastructure is expanding. However, the successful transition to the new type of vehicle depends heavily on customers’ acceptance of the EVs. To date, there are three main barriers to the wide adoption of EVs, i.e., (1) their relatively short driving range; (2) the long charging times and the unavailability of charging stations, especially in rural locations; and (3) the higher cost of buying an electric compared to a conventional vehicle. Such problems are more evident in under-developed and poor countries which, nevertheless, account for a significant percentage of the produced pollutants. Given that several years are needed before these limitations can be raised at a global level, it is crucial to find ways to soften these drawbacks and make EVs attractive to potential customers. For example, the use of efficient scheduling algorithms that can coordinate the simultaneous charging of large numbers of EVs considering the available stations and the power grid constraints, in parallel with the fair pricing of the electricity, can partially raise limitations 2 and 3.
In this work, we study the allocation of EVs to charging stations, the scheduling of the charging within each station and the pricing of the charging. We aim to maximize the number of EVs that are charged by balancing the load within each station and across all stations and to minimize the impact on the drivers’ schedule and the price they are asked to pay. We focus on an urban setting, where the charging stations are located at predefined locations and are owned by a single operator. Furthermore, EVs are modeled as self-interested agents and express their demand for charging through a set of spatial and temporal constraints, as well as a maximum price they are willing to pay for the charging. The charging scheme operator has as an objective to charge the maximum number of EVs (i.e., charging all EVs may be impossible due to insufficient resources) while keeping the distribution of the EVs across the charging stations and within each station in balance (i.e., avoid having fully occupied stations, while others are empty). The latter is important in order to better handle future charging requests. At the same time, the charging scheme also needs to be economically viable, although maximizing the profit is not the objective (which mainly applies to non-profit organizations such as municipalities). We argue that having such charging schemes is crucial when aiming to further expand and popularize electromobility. To this end, we advance the state of the art in scheduling algorithms and mechanism design to coordinate demand and supply to maximize the use of the available resources and mitigate the impact on the grid.
In order to allocate vehicles to charging stations, we propose both optimal offline solutions and (necessarily sub-optimal) online ones. In all cases, we make use of market-based techniques. In the case of the offline solutions, the EVs report their preferences, such as the amount of energy they need to charge and the time of arrival to the charging station, a day ahead. Then, the vehicles with the highest valuations are the ones that are selected by the scheduling algorithm to charge, while the constraints imposed by the charging stations and the electricity network are followed. The valuation is a metric of how much the agents want the energy units, which translates into the maximum price that each agent is willing to pay for each unit of energy. Once the vehicles have been allocated to the stations, we use two alternative pricing mechanisms. The first mechanism is a fixed-price one, while the second is a variation of the well-known Vickrey–Clark–Groves (VCG) mechanism [2,3,4]. In the case of the online solutions, EV requests are collected by the system over time. Then, the offline algorithms are executed periodically, at pre-defined points over the day, in order to decide the EV-to-charging-station allocation (i.e., a number of requests are being collected and then the scheduling algorithm is called. Thus, each EV waits until the next execution of the scheduling algorithm to learn its allocation). As we show below, the VCG mechanism leads to a more efficient and balanced allocation of the EVs both across the charging stations and within each station, while, at the same time, it maximizes the EVs’ social welfare and enforces them to truthfully report their preferences.
This paper extends our previous work [5] by (a) adding detailed proofs of the mechanisms’ properties, (b) by adding the online scheduling algorithms and (c) by undertaking a more extensive and detailed experimental evaluation. We also take inspiration from [6,7]. In [6], the authors use congestion pricing to incentivize EV agents to charge in stations where the congestion is low, while the authors in [7] propose a mechanism that allocates energy units to self-interested agents and aims to maximize the agents’ social welfare. Overall, we extend the state of the art as follows:
- 1.
- We develop an optimal solution to the problem of allocating EVs to charging stations based on the vehicles’ demand and the availability of the stations using Mixed Integer Programming (MIP). In this case, we consider not only the electricity cost, but also an imbalance cost which represents the difference between the actual and the expected demand.
- 2.
- We propose two alternative pricing mechanisms and we theoretically prove that, for one of them, the dominant strategy for all agents is to truthfully report the EV preferences.
- 3.
- We propose online algorithms that incrementally execute the optimal offline algorithms and achieve near-optimal performance.
- 4.
- We performed an experimental evaluation of our algorithms in a setting partially based on real data, using different scenarios, and we observed that the offline algorithms serviced high numbers of EVs and had good scalability (i.e., the fixed-price one scaled to settings involving hundreds of stations and thousands of EVs, while the VCG one scaled to tenths of stations and hundreds of EVs), while the online ones performed close to the offline ones.
The rest of this paper is structured as follows: Section 2 presents the related work, Section 3 formally defines the problem and Section 4 presents the optimal EV-to-charging-station allocation scheme. Section 5 presents the two pricing mechanisms and Section 6 describes the online variation of the problem. Finally, Section 7 presents the empirical evaluation and Section 8 concludes this work and presents ideas for further research.
2. Related Work
Market-based techniques were among the first techniques that were used in the effort to efficiently manage and coordinate both individual and flees of EVs [8]. Initial work by Caramanis and Foster [9] investigated market-based techniques to control the charging of groups of EVs focusing on balancing the load on the distribution network and on providing regulation services (i.e., used to correct short-term changes in electricity use), while also integrating energy from renewable sources. Specifically, they developed a market bidding strategy for an aggregator that represents a set of EVs, using stochastic dynamic programming that handles the uncertainty in the demand from the EVs. It also maximizes the revenue from the regulation services by efficiently absorbing unpredictable variations in the production of renewable energy into the EV batteries. In [10], the same authors expanded their previous work by proposing a strategy for the EV aggregator to bid in hour-ahead real time markets. Additionally, Zhang et al. [11] studied whether EVs could participate in the energy market in order to provide flexible ramping products. To predict EV traffic flows, the authors used a deep belief network. These predicted traffic flows were then used to predict whether flexible EVs were available. As a next step, a market-based mechanism, in the side of the distribution system, was developed that enforced the EV demand to react to economic signals and provide ramping services.
In a similar vein, González Vayá and Andersson [12] modeled the bidding strategy of EVs that participate in an electricity market through an aggregator as a two-level problem. The upper-level minimizes the charging cost of the aggregator, while the lower-level focuses on the market clearing, which is the price on which electricity is sold. Additionally, Yang et al. [13] proposed a centralized EV charging scheduling scheme which could efficiently manage the load mismatch risk between a day-ahead and a real-time market. The scheme uses the day-ahead prices and statistical information about the EVs’ driving patterns. At the same time, the risk-aware day-ahead scheduling is modeled as a two-stage stochastic linear problem and is solved using the L-shaped method [14]. Moreover, Soares et al. [15] presented a two-stage stochastic programming approach which uses dynamic pricing for the EVs, but also takes into consideration the uncertainty in energy demand from the EVs and supply from the renewable sources. Finally, Perez-Diaz et al. [16] studied a setting where a number of independent and self-interested EV aggregators participate in the day-ahead market and want to purchase energy for their clients based on their driving needs and charging demand.
In the works presented so far, an aggregator typically collects the preferences of a number of EVs and then bids in the market trying to satisfy the demand. Aside from such mechanisms, others also focus on the management of the congestion that may occur when several EVs charge simultaneously. These mechanisms consider individual EVs as opposed to aggregations of EVs. A common characteristic in many of these mechanisms is the focus on providing the right incentives to the EV agents so as to have as their best strategy to reveal their true preferences for the available charging times and reserve prices. In particular, we note the initial works by Stein et al. [7] and Gerding et al. [17,18]. These works used mechanism design techniques in order to provide incentives to self-interested EV agents to book charging slots in such a way so as the charging cost to be reduced and the charging network stability to increase. Specifically, [7] proposed a mechanism to allocate energy units to a set of self-interested EV agents that want to maximize their social welfare. To achieve this, the authors used a variation of the Consensus algorithm. Additionally, their mechanism commits to charge the EV before its departure time, but is flexible on choosing the points in time and the rate for the charging taking place. The authors proved that, by using their mechanism, the EVs have, as their best strategy, to report truthfully their preferences to the station. Instead, in [17], the EVs define the time windows within which they are available to charge and bid for energy units in a periodic multi-unit auction. In this mechanism and in order to ensure truthfulness from the side of the EVs, some units of electricity are occasionally left unallocated, even if there is demand for them. Moreover, in [18], the authors designed a two-sided market between the EVs and the charging points. In this setting, the charging points report their availability and costs and the EVs report their preferences and their value for the electricity. Then, they are allocated to slots that maximize the difference between their value and the sellers’ cost. At the same time, aiming to address the uncertainty in future EV charging demand, Jahangir et al. [19] developed a deep learning-based algorithm that uses a classification structure and considers the travel characteristics of the EV drivers. In the classification task, an unsupervised classifier clusters historical EV data aiming to find travel-behavior patterns. Then, for each new EV, a supervised classifier connects it with its appropriate cluster-specific forecasting network.
In addition, congestion pricing has been used to schedule EVs in such a way so that the load and the congestion are minimized. For example, [20] developed a decentralized solution where the utility broadcasts price signals a day ahead and the EVs react to them. Specifically, they developed two alternative tariffs where, in the first one, the same price applies in all locations, while, in the second one, prices may be different at different locations. By varying their charging to minimize their cost, the EVs also reduce congestion on the distribution network. This solution balances the load mostly at individual nodes and not across the network. However, Rigas et al. [6] presented solutions that balance the charging across a set of stations. In particular, they applied congestion pricing across nodes in the charging network using dynamic pricing mechanisms. In this way, the EVs schedule themselves to minimize congestion and cost both across the network and at individual charging stations. Additionally, Ghosh and Aggarwal [21] propose an online pricing mechanism where each charging station can calculate the price to charge each EV considering the available energy and the time of the day. The authors showed that, when the mechanism knows the true valuations of the agents, it maximizes social welfare (i.e., utilities for the EVs and profit for the stations). However, they did not guarantee truthtelling from the side of the EVs.
Finally, Li et al. [22] studied the highly important problem of the efficient placement of charging stations. In doing so, based on a case study in Sydney, they proposed a market-based mechanism related to the planning of EV chargers’ placement. To do this, it is crucial to have an estimation of future EV demand. In this vein, they used a multi-relation graph convolutional network (GCN)-based encoder–decoder deep architecture.
In contrast to the works presented so far (see Table 1), in this paper, we propose an algorithm that assigns EVs to charging stations which, apart from EV satisfaction, also takes into consideration the balanced charging of EVs across the stations. Moreover, we developed two pricing mechanisms, where one of them ensures truthtelling to be the dominant strategy for all EVs. In other words, we achieved both load management and social welfare maximization given the set of EV agents and the available resources. In addition, we solved the problem both offline and online. According to the best of our knowledge, this is the first such study in the EV-related literature [8].
3. Problem Definition
In our model, the vehicles are driving across a road network that is represented as an undirected fully connected graph . Nodes represent the junctions of the road network and edges represent the road segments that connect the junctions. The charging stations are placed in some of the junctions of the network , where is the set of nodes with charging stations and the set of nodes without charging stations. In our formulation, we use a discrete time horizon , . All charging locations are equipped with a number of chargers , where all chargers at each station l are characterized by a charging rate (i.e., energy units/time point transferred from a charger to an EV). Additionally, all charging stations pay for each unit of electricity they consume a fixed cost to the electricity provider. We note that the proposed model is general in terms of the topology of the charging network and it can work with any distribution of charging stations.
Additionally, we refer to the set of electric vehicles as , where each EV has a type which is defined by a tuple . Specifically, each vehicle a is characterized by an energy consumption rate and a maximum capacity of its battery , as well as a current battery level at point in time t, . The battery levels are always measured in kWh. Moreover, each EV a has a source location from which it departs at time to travel to its destination location where it should stay parked for time . In this vein, for any two locations and given the road network G, Dijkstra’s algorithm is used to calculate the shortest route between the source and the destination (i.e., is the set of all possible routes between points and ). Additionally, all the shortest routes between the source location and all charging stations are also calculated. Every route has a distance which is measured in kilometers, a travel time and an amount of required energy, . In this formulation, we assume the vehicles to be driving at a constant speed. Based on charger availability and an EV’s ability to reach a charging station given its initial battery level, a set of valid stations is populated. Now, every EV is available to charge between and . Each vehicle announces in advance the amount of energy it needs to charge at charging station l. For this energy, it has a personal valuation .
This valuation is calculated using Equation (1). According to this equation, each agent receives zero valuation when it charges less than and valuation for charging equal to or more than . In this equation, refers to a time cost related to an EV driving to the station and then the passenger walking from the station to their final destination. This shows how willing agent a is to drive to point l and then walk to the final destination and is subtracted from the valuation for charging the desired amount of electricity. Moreover, each EV a receives utility , namely,
where is a monetary transfer that the EV makes to the system. In this case, utility measures the satisfaction that an agent receives for charging the desired amount of energy. has a positive value, as the EVs pay the charging station for the electricity, unless the charging of an EV reduces the imbalance cost for the charging station. In this case, the transfer for this EV may be negative (i.e., the EV receives a payment—see Section 5.2).
Given the above, we use an allocation matrix showing whether an EV a charges at station l at point in time t. Moreover, for each charging station and point in time, there is an expected demand which represents the number of energy units which are expected to be consumed. We assume these units to be agreed with the electricity provider in advance. In so doing, a monetary penalty ,
is applied to the stations for each time point in which the actual demand is different from the expected one. The term imbalance describes the difference between the actual demand and the expected one. The imbalance cost is the sum of the absolute value of the difference between the sum of EVs charging at each point in time and the expected demand over all charging points, which is multiplied by a fixed cost (see Equation (3)). Thus, the closer the actual demand is to the expected one, the lower the imbalance cost is, thus the price penalty that each station needs to pay. Note that such imbalance penalties are common practice in the energy industry [23,24,25].
Now, to calculate the allocation of an EV to a station, the EV has to reveal its type to the system. Once the type is known, the system applies an EV-to-charging-station allocation algorithm to schedule EV charging and uses one of the two proposed pricing mechanisms to calculate the prices for the EVs. These mechanisms can be either offline (Section 4), or online (Section 6). Henceforth, index a refers to the EVs, l to the charging stations and t to the time points.
4. Offline Scheduling of EVs to Charging Points
The optimal allocation of the EVs to the charging stations is a fundamental problem in the way to the wide adoption of the new type of the vehicle. Thus, in this section, we formulate this problem using Mixed Integer Programming (MIP) techniques and we solve it offline. The solver that was selected was IBM ILOG CPLEX 20.10. In this formulation, we define two decision variables as follows: (1) which decides whether an EV a is serviced at charging station l; (2) which decides whether EV a is charging at point in time t, at station l. This formulation has as an objective to maximize the sum of the agents’ valuations and minimize the electricity and the imbalance cost for an optimal allocation of vehicles to stations (see Equation (4)). Note that the absolute value in the objective function is linearized at run time by CPLEX (https://ibm.co/3mXX0n8, accessed on 7 December 2021). More formally, the program is given by
Objective function
Subject to
where each EV a is constrained to charge at most at one charging station l (Equation (5)) and the initial battery level of each EV needs to be enough to ensure that it can travel to the selected charging station (Equation (6)). Additionally, each EV that has been selected to charge must do so for a minimum number of points in time. This is calculated by dividing the energy demand by the charging rate at station l () (Equation (7)). Moreover, no charging must take place for all points in time before the arrival and after the departure of an EV a at charging station l (Equation (8)) and during the charging of an EV its maximum battery capacity should not be exceeded (Equation (9)). Finally, the maximum capacity (in terms of the number of vehicles that can be charging at the same time) of each charging station must not be exceeded at any time (Equation (10)).
In the next section, we present the two alternative pricing mechanisms for the electricity that each EV charges.
5. Pricing Mechanisms
In this section, we describe two alternative mechanisms which are used to calculate the price that the EVs need to pay for the electricity they charge according to their charging schedule as presented in the previous section. In the first mechanism, we assume the agents to be truthful, while, in the second one, they may misreport their types.
In order to evaluate a mechanism, we examine whether a number of properties, presented as follows, hold (see also Table 2):
- (1)
- Individual Rationality: This means that all agents that are scheduled to charge have non-negative utility, while the ones that are not scheduled to charge have zero utility (i.e., ). In our setting, this specifically means that agents never pay for the energy more than their valuation.
- (2)
- Dominant Strategy Incentive Compatibility: This means that, for all agents, truthfully reporting their types is the best strategy, no matter what the other agents do (i.e., ). In our setting, this means that the agents do not end up paying higher prices if they are truthful regarding their valuations for the energy.
- (3)
- Efficiency: A mechanism, such as the one presented in this work, is efficient, if, in equilibrium, it selects a choice such that it maximizes social welfare, . In our case, this means that the available energy units are charged to the agents with the higher valuations.
- (4)
- Budget Balance: This means that the sum of all transfers (i.e., payments to and from the charging stations) are equal to zero (i.e., ). Weak budget balance means that is non-negative. In our setting, weak budget balance is needed for the sustainability of the community stations, meaning that the stations should not suffer from losses but also that maximizing profit is not their goal.
5.1. Fixed-Price Mechanism
The first pricing mechanism that we propose is a fixed-price one. In this mechanism, the transfers (i.e., payments) of the EV agents to the charging stations are calculated based on
Based on this equation, the price that each EV pays consists of the cost of the energy units that are charged, which is then increased by a percentage . determines how much profit the charging station makes for each electricity unit that is charged to an EV. This price setting mechanism is typical in many markets where the seller simply sets the price for a product based on its cost increased by a fixed percentage. The value of is set to the point where the mechanism starts being profitable (for a detailed description, see Section 7). We refer to this mechanism as Fixed.
The allocation of EVs to charging points is based on the objective function (Equation (4)). However, given that the price that each agent is asked to pay is calculated after the optimal allocation is decided, the agents’ valuations are not considered. Thus, it is possible for some agents to have lower valuation than the price they are asked to pay. In this case, these agents are assumed to decide to drop out receiving zero utility. Note that, in this case, the optimization is not re-executed and some resources remain unused. Thus, we conclude that the agents’ utilities are always larger or equal to zero and the mechanism is individually rational.
Given that the mechanism is individually rational, the agents may have an incentive to misreport their valuation. For instance, assuming that and , if an agent has valuation but reports and , the optimization algorithm would schedule this vehicle to charge and the price to pay would be . Thus, the price to be paid by the agent would be the same, but it would increase the chances of being selected instead of another agent that would be truthful when reporting their valuation. For this reason, the mechanism is not incentive compatible. This is experimentally confirmed in Section 7.4.
In terms of the efficiency of the mechanism, Equation (4) must be maximized. Given that, after the initial allocation of EVs to charging stations based on Equation (4), some agents may decide not to charge in case they are asked to pay a price which is higher than their valuation, some resources may remain unallocated. Therefore, the mechanism is not efficient.
Finally, regarding the ability of the mechanism to make a profit, the mechanism is definitely profitable only in the case where the actual demand is equal to the expected one, as and . If the demand is not equal to the expected one, then the budget can be either positive or negative. The mechanism is budget balanced only if . Therefore, in the general case, the mechanism is not budget balanced. Next, we present a pricing mechanism that is based on VCG.
5.2. VCG-Based Mechanism
Achieving higher utility can provide an incentive for agents to misreport their types. The fixed-price mechanism that was presented in the previous section is vulnerable to manipulation if some agents are not truthful (e.g., report higher valuations). In this section, we present a variation of the well-known Vickrey–Clarke–Groves (VCG) mechanism [2,3,4] for the problem of allocating EVs to charging stations, while also considering the electricity as well as the imbalance cost. The VCG mechanism is a generalization of the Vickrey auction, where, in the general case, multiple agents bid for multiple goods of the same type (i.e., combinatorial auction) and the price to pay for each agent is calculated based on the harm they cause to the other agents [26]. This mechanism is very popular due to the fact that it is incentive compatible. This means that no agent can obtain any benefit by declaring anything other than its true type. Thus, if we assume that all agents play their dominant strategies, this mechanism allocates the resources (i.e., electricity units) optimally in terms of maximizing social welfare and then calculates the price that each agent pays to the mechanism.
In order to calculate the allocation of EVs to charging stations, the MIP formulation as described in Section 4 is used. The outcome of the optimization procedure is an optimal allocation of EVs to charging points. We calculate the monetary transfer (i.e., the price) that EV a pays to the mechanism for the energy charged, as follows:
Based on this equation, each EV agent a is asked to pay its impact on the others (i.e., its social cost) added to the cost of the electricity it charged and the imbalance cost. is the optimal allocation without the existence of agent a, is the valuation of agent e based on an optimal allocation , is the cost of electricity for agent e based on an allocation and is the imbalance cost for e based on . Specifically, the first sum contains the total values and costs for all agents but in an allocation where a does not exist, whereas the second sum contains the total value of all agents apart from a and the costs for all agents including a in an allocation where all agents participate. In all cases, the cost of electricity is fixed (per energy unit) for all agents and acts as a reserve value for the charging station, while the imbalance cost depends on the demand profile. In fact, it is the existence of the imbalance cost which leads to potential negative transfers to the stations (i.e., the station may pay an EV to charge in order to reduce the imbalance). From now on, we refer to this algorithm as VCG.
In contrast to the previous mechanism where agents have an incentive to lie, here, due to the fact that (1) the VCG mechanism is used and (2) the types of EVs are not interdependent, it is best for the agents to reveal their types truthfully. In the rest of this section, we prove the properties of this mechanism.
Theorem 1.
The VCG mechanism for the EV allocation problem is individually rational.
Proof.
The result of the optimization procedure is a set of agents selected to charge and an allocation to charging stations. Now, , the transfer from agent a to the system is given by Equation (12) and the utility of agent a is given by Equation (2) which, based on Equation (12), becomes
Now, in order for to be greater or equal to , thus for Equation (14) to be true, the choice-set monotonicity and the no negative extrnalities properties must hold [27]. Choice-set monotonicity means that, by removing any agent, the mechanism’s set of possible choices weakly decreases. In our case, this property holds as, if an EV leaves, the mechanism has fewer choices in scheduling the EV charging. Moreover, the no negative externalities means that every agent has zero or positive utility for any choice that can be made without its participation. In our case, this property also hods, as, if an agent does not participate in the mechanism, it obtains utility equal to zero. In addition, note that, if the second sum were larger than the first one, the optimizer would not select i to charge in the first place. For these reasons, Equation (14) always holds and the mechanism is individually rational (Equations (15) and (16)).
□
We can safely assume that the agent would not lie about the discharging rate, the maximum battery capacity of the EV, the initial battery level, the start location and the final destination. The discharging rate and the maximum battery capacity are considered to be common knowledge. If an agent lies about its initial battery level, then it reduces the options that the scheduler has to assign it to a charging station. At the same time, there is no point in lying about its start and end location as, in that case, it would have to move to or from these locations, which could cost the agent more than it would be gaining. Given these, we can prove the incentive compatibility of the mechanism.
Theorem 2.
The VCG mechanism for the EV allocation problem is the dominant strategy incentive compatible under the assumption that the system knows the discharging rate, the maximum battery capacity, the initial location and the final destination of each EV.
Proof.
Agents could have an incentive to misreport their energy demand () and their valuation for this energy (), the time cost (), their arrival and departure times (, ). We assume that the discharging rate, the maximum battery capacity of the EV, the initial battery level, the start location and the final destination are common knowledge to the scheduling centre.
In what follows, we prove incentive compatibility for the agents’ reported type, for an optimal allocation . The utility of agent a, when it reports its type truthfully, is
while, when agent a reports its type non-truthfully, its utility is
In this case, the utility is the difference between the true valuation of agent a and the impact on the other agents based on the non-truthful report of its type.
The first two terms of Equations (17) and (18) are not affected by the non-truthful report of the type of agent a (reminder: is the value of the objective function—Equation (4)). Thus, in order to understand whether the mechanism is incentive compatible, we have to see how the final term can be affected. In so doing, we evaluate a number of cases as follows:
- 1.
- Agent a is non-truthful and charges the following:
- (a)
- If its report does not affect anyone else, thenThus, and, for this reason, agent a has no incentive to lie.
- (b)
- If its report affects agent , thenGiven that is greater than zero (otherwise b would not have been selected to charge in the first place), and, for this reason, . Therefore, a has no incentive to lie. Note that, if this agent’s report affected more than one agent, its loss would be even greater.
- 2.
- Agent a is non-truthful and does not charge. In this case, . Thus, it does not have an incentive to lie.
Note that, if agent a reports or , then the optimizer could schedule it to charge at time points in which it would not be at the charging station. Thus, the agent would obtain less energy compared to its demand, thus zero utility. In addition, if agent a reports , then, by default, it would obtain zero utility. Moreover, if , the optimization already takes that into consideration (i.e., Constraint 7). So, if an agent were better off reporting higher energy demand (as this could decrease the imbalance cost), then the optimization would do it automatically. □
Theorem 3.
The VCG mechanism for the EV allocation problem is efficient (i.e., maximizes social welfare).
Proof.
In order for the mechanism to be efficient, Equation 4 must be maximized. Indeed, after the optimization procedure and given that the mechanism is incentive compatible, the allocation of EVs to charging points leads to the maximization of this function. Therefore, the allocation is efficient. □
Theorem 4.
The VCG mechanism for the EV allocation problem is not budget balanced.
Proof.
The budget of the mechanism is given by
In the general case where the actual demand is different from the expected demand, budget balance cannot be guaranteed. In the case of very low demand, the stations have a loss, as the income is low but the imbalance cost very high. For example, if the expected demand is two EVs at each time point and no EV arrives to charge, the station would have a loss as it would need to pay the imbalance cost as calculated from Equation (3). Moreover, given that the charging of an EV can reduce the imbalance cost, negative transfers are also possible. In the case where the actual demand is higher than the expected one, the EVs have positive transfers to the stations. Thus, our mechanism is not budget balanced. However, in our setting, although profit maximization is not the main objective, this should not be considered a problem, as the aim of the charging stations should be to make some profit so as to be economically sustainable.
Now, in the extreme case where the actual demand matches exactly the expected demand, then . In this case, the charging of any EV does not affect the charging of another (we assume that the pre-agreed consumption can always be covered by the station). Thus, the sum of all transfers from the agents to the stations is equal to the cost of electricity paid by the stations to the electricity provider (). Only in this case, our mechanism is budget balanced. □
6. Online Scheduling of EVs to Charging Points
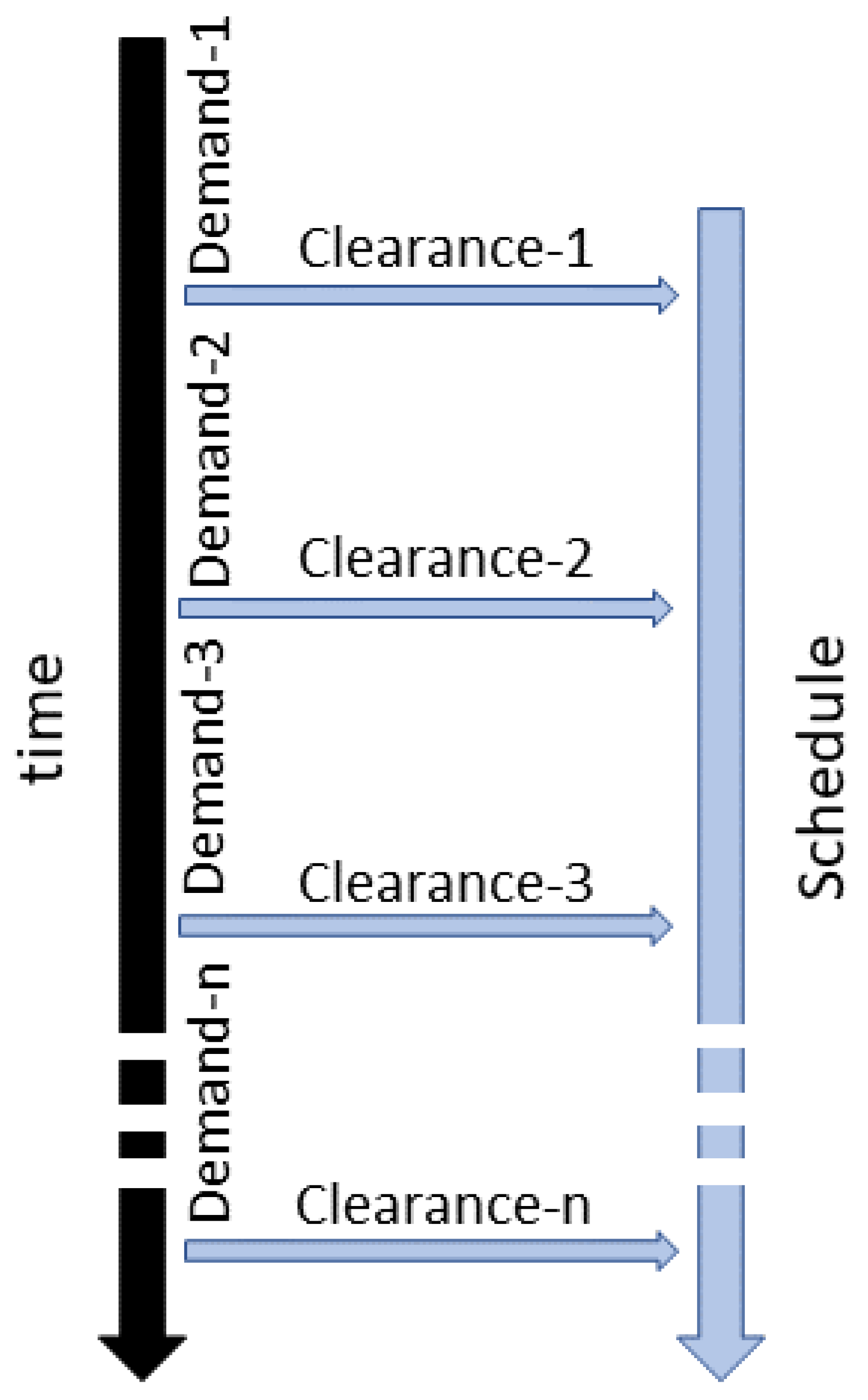
So far, we assume that the demand becomes known to the system a day ahead. However, in this section, we present an online version of the EV-to-charging-station scheduling problem where agents arrive in the system dynamically over time and need to charge. In so doing, the system collects the requests from the agents and clears the market at pre-defined points in time, similar to [17]. By market clearing, we mean that the EVs that have reported their preferences to the system are considered in the EV-to-charging-station scheduling (see also Figure 1 and Algorithm 1). In more detail, a sequence of points in the day where market clearing takes place is defined. After each , the charging scheduling algorithm (Section 4) is executed and an optimal allocation is calculated. Later, the price to pay for each EV is calculated based on either the Coop or the VCG mechanism. Now, for every , the mechanism makes sure that the already existing schedule of EVs charging is not affected. This is an important assumption, as it later guarantees incentive compatibility from the side of the EVs in the case where the VCG is used to calculate the prices. In addition, note that all EVs that participate in the market at must have an arrival time .
The properties of the VCG mechanism, as described in the previous section, also hold in the online setting. However, special notice should be given to the dominant strategy incentive compatibility and the efficiency.
Regarding the incentive compatibility, agents could try to misreport their arrival time in order to participate in a later market clearing. However, as agents can report their demand for any time in the day, by delaying the report, they cannot have higher utility. This is due to the following reasons: (1) Given the imbalance cost, the earlier an agent arrives to the system, the higher the improvement it causes to the imbalance cost. Thus, the transfer of the agent to the mechanism could become smaller. (2) If an agent delays the report, stations can already be highly congested, thus not being able for it to charge. Therefore, the best strategy for the agents is to report their preferences to the system the earliest time possible (i.e., the time they decide that they want to charge).
| Algorithm 1 Online EV-to-charging-station scheduling. |
Require:A, T, L, ,
|
Moreover, regarding efficiency, the mechanism is efficient for each market clearing. However, it may not maximize social welfare for the whole set of agents. This is inevitable due to the fact that the system does not know the future demand. Thus, agents with possibly low valuations that have participated in an early market clearing may have occupied charging slots that could have later been used by agents with higher valuations.
In the next section, we present the evaluation of our algorithms in a realistic setting and for a number of problem dimensions.
7. Evaluation
In this section, we present the evaluation of the proposed algorithms in terms of their execution time and scalability (EXP1), their ability to service many EVs (EXP2), the charging cost for the EVs and the profit that the charging stations make (EXP3) and the impact the non-truthful reporting of agents’ preferences has on the charging of the EVs (EXP4). To construct the experimental setting we used real data from Athens, Greece (https://www.fortizo.gr/, accessed on 7 December 2021), regarding the charging stations’ locations and the number of available chargers. Additionally, we assumed 50 points in time to exist, each point being equal to 15 min, 8 charging stations and up to 200 EVs. Regarding the type of each EV, their arrival and departure times, their energy demand and their valuation for each energy unit, as well as the stations’ expected demand, they were drawn from uniform distributions (i.e., , , , , which is then multiplied by the number of energy units the agent wants to charge and ). We assumed the charging rate of all the chargers to be fixed to one unit of energy for each point in time and that the desired energy is always able to be charged within the time window the EVs state. This means that we assumed the chargers to be slow ones and we also assumed that all EVs were of the same type equipped with a 40 kWh battery. However, note that these values are indicative and the algorithms can operate efficiently with any combination of types of EVs and chargers. Finally, the value for the Fixed mechanism was calculated as follows: An initial value of was given to and the optimization was executed recursively, each time increasing by . At each iteration, some EVs may leave the system as the price to pay becomes higher than their valuation. The value of was fixed to the point where the mechanism started making a profit. This procedure was executed multiple times for different numbers of EVs and the average value of was selected. Finally, the time points at which the scheduling took place in the online scenario were . Note that, for each p, requests collected at any and were considered. Note that all experiments were executed on a Windows PC with an Intel i9-11900F CPU and 64 GB of RAM running at 3200 MHz.
7.1. EXP1: Execution Time and Scalability
The problem that we solve in this paper is highly combinatorial. Such problems are characterized from high execution times. For this reason, here, we evaluated the execution time of both the offline and the online algorithms in a number of different scenarios (see Figure 2 and Figure 3).
In terms of the VCG mechanism, the execution times for both the offline and the online versions increased with a relatively high rate. For example, for up to 60 EVs, both algorithms had execution times which are well under 30 s. However, later, the execution time for the offline version increased rapidly and, for 200 EVs, it reached 1118 s, while the online algorithm executed in 44 s. Note that, for the online version, we present the average execution time for all market clearings for each number of EVs (reminder: in the online version, the scheduling algorithm is called at specific points in time). For the online algorithm, it is crucial to calculate a charging schedule fast in order to enhance its usability in real-world applications. In this vein, the average execution time of 44 s for 200 EVs can be considered as an acceptable value. However, it should be noted that, due to the fact that, for each market clearing, the EVs that had already been scheduled to charge were considered as well, as a constraint this time, the optimization procedure remains quite complex. In fact, although the objective function is linearized at run time, the second part of it which contains the absolute value significantly affects the execution time.
Regarding the Fixed mechanism, the execution time grew with a relatively slower rate than the VCG for both the offline and the online versions. For example, for 200 EVs, the execution time for the offline version was approximately 33 s and, for the online one, 14 s. Note that the error bars in all graphs show the standard deviation of each sample.
7.2. EXP2: Serviced EVs
In terms of the average number of serviced EVs (Figure 4), when we compared the offline algorithms, we observed that, in the best case, the Fixed was at of the VCG, in the average case, at of the VCG and, in the worst case, at of the VCG. Now, when we compared the online algorithms, we observed a similar efficiency, as, in the best case, the Fixed was at of the VCG, in the average case, at of the VCG and, in the worst case, at of the VCG. The fact that the VCG serviced slightly more vehicles than the Fixed can be explained by the fact that the Fixed does not take into consideration the valuations of the EVs when setting the prices. Thus, some EVs are asked to pay prices higher than their valuations and they leave without charging. In addition, the offline algorithms serviced more EVs than the online ones. This was expected due to the fact that, when the problem is solved online, congestion and resource management cannot be optimized and, for this reason, some EVs remain uncharged.
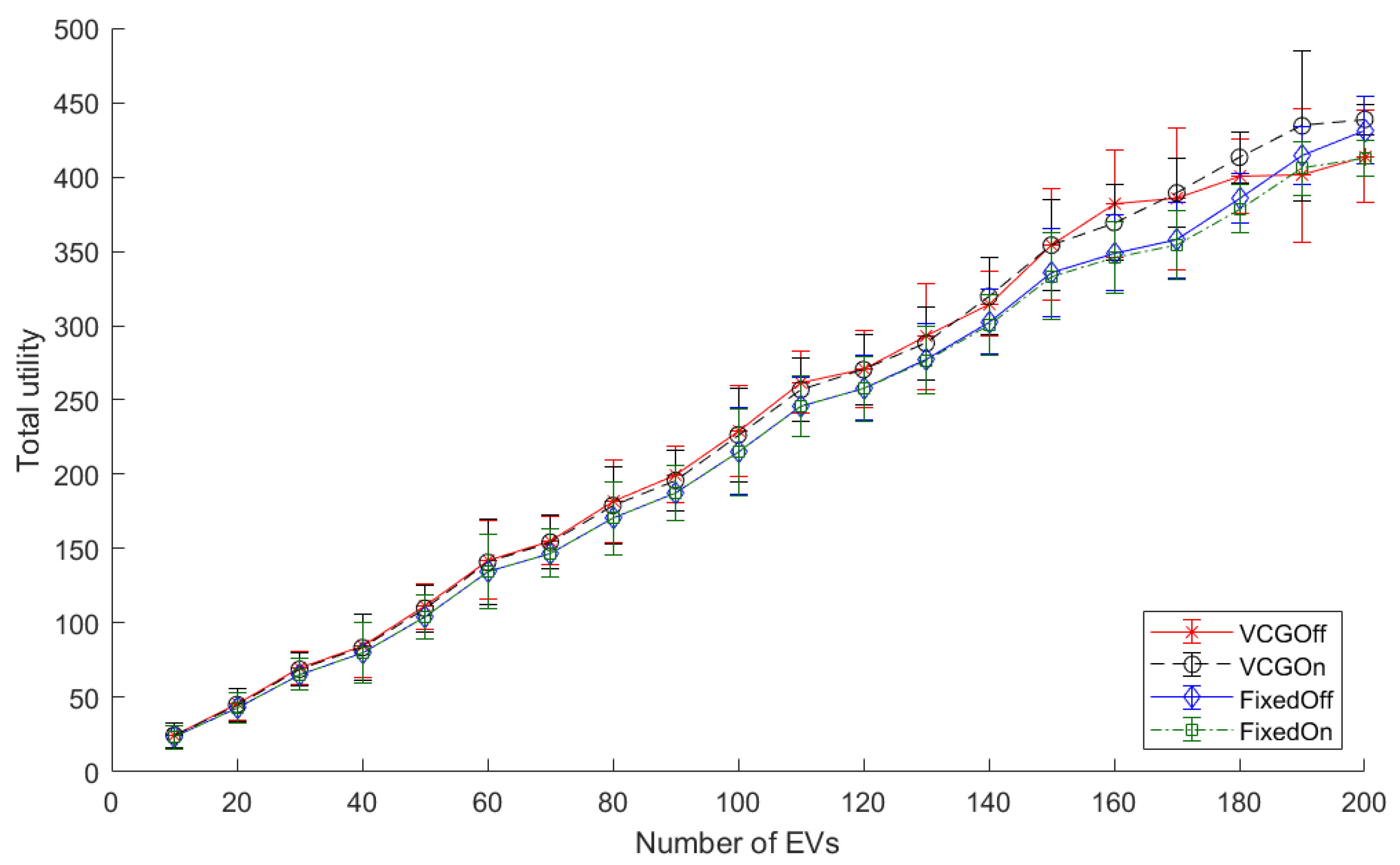
In terms of the total utility of the serviced EVs (Figure 5), it was observed to be increasing linearly with the number of EVs for all mechanisms. Specifically, the utility of the online version of the VCG was higher than the equivalent offline one for settings with more than 170 EVs. This is explained by the fact that the offline charges more EVs, thus increasing the competition for resources. This leads to calculating higher prices for the EVs (i.e., when the number of EVs to be charged increase, the addition of one EV is more likely to lead to others not being charged and, for this reason, the prices calculated by the VCG mechanism are higher; see also Section 7.3). In addition, we observed that the rate of increase in the utility provided to the EVs when the VCG mechanism was used slowed down for high numbers of EVs. This is explained by the fact that, when the demand for resources increases a lot, this mechanism calculates high prices for the agents. Regarding the Fixed, the utility for both variations was almost the same and, for large numbers of EVs, higher than VCG Offline. However, although the Fixed mechanism provides higher utility to the agents, it is vulnerable to manipulation in the case where EVs are not truthful when reporting their types, whereas VCG remains unaffected by such behavior, as the EVs would have a loss any time they would report anything other than their true types (see Section 7.4).
7.3. EXP3: Price to Pay for the EVs and Budget for the System
In terms of the average prices, the EVs are requested to pay to the mechanisms (Figure 6); when the number of vehicles was up to 160, the offline and online variations of the VCG calculates similar prices. However, for more than 160 EVs, the prices calculated by the VCG offline increased rapidly. This can be explained by the fact that, when the number of EVs increases, while the number of charging stations remains fixed, the competition for resources (i.e., charging slots and energy units) increases and the mechanism calculates higher prices. In the online variation of the VCG, the rate of increase was smaller, as in each market clearing, the competition for the resources is smaller than the offline, as slightly fewer EVs are charged and, for this reason, the mechanism calculates lower prices. As far as the Fixed mechanism is concerned, the average price depends on the number of serviced EVs only.
Regarding the profit that the proposed mechanisms create (Figure 7), for both mechanisms, when we compared the offline and the online variations, the first always led to higher profit. This was expected due to the fact that, when the problem is solved offline, more EVs are serviced. Now, when we compared the VCG to the Fixed mechanism, we observed that the Fixed provided higher profit for up to 180 EVs, but then the profit of the VCG offline increased rapidly. At the same time, the profit of the VCG online also increased, but did not exceed the one provided by both variations of the Fixed mechanism. As was expected, the results related to the profit of the mechanisms echo those related to the prices paid by the EVs. The fact that the VCG was observed to provide significantly higher profit for large numbers of EVs is due to the fact that VCG reduces more efficiently the imbalance cost. This happens as, in the VCG, all EVs that are selected to charge are requested to pay prices which are lower than their valuations. Thus, no EVs leave the mechanism without charging. In contrast, the Fixed may calculate prices higher than the EVs’ valuations, in which case these EVs leave without charging. Thus, the Fixed mechanism pays higher imbalance cost, especially when the number of EVs is high.
Based on the findings discussed above, a question that arises is how the number of charging stations can affect the profit that the mechanisms create. As can be seen in Figure 8, when we fixed the number of EVs to 80 and we gradually increased the number of stations from 6 up to 18 the profit of the VCG mechanism decreased. Considering the way the VCG operates, this decrease is natural, as, when the stations increase, the resources also increase, while the demand remains unchanged. Thus, the competition reduces and so do the prices. It is very interesting to notice that, when more than 14 stations existed, the mechanism started having losses. This happens due to the imbalance cost. Assuming all stations had the same expected demand, when there were up to 14 stations, the actual demand typically overcame the expected one. Thus, most of the EVs had a positive transfer to the mechanism and the total profit was positive. However, when more than 14 stations existed, the expected demand exceeded the actual one and the transfers of some EVs became negative (i.e., they received a payment from the mechanism). This happens as these EVs reduce the imbalance cost and their existence has a positive impact in the system. This finding can be especially useful when EV charging companies or organizations need to decide on the optimal number of stations to be built in a given area. At the same time, the Fixed calculates similar prices for all cases as these prices are not related to the demand and the supply.
7.4. EXP4: Truthful vs. Non-Truthful Reporting
In the experiments presented so far, all EVs were assumed to report their types truthfully. However, this may not be always the case. Thus, we evaluated a setting where some EVs reported their valuations non-truthfully. By reporting lower valuation, many of these EVs were not selected to charge and obtained zero utility. Thus, it is obviously a negative choice for them and, for this reason, we focus on the case where some EVs reported a higher valuation. In particular, we assumed that of the EVs reported higher valuation (for this value, the liars were observed to achieve the highest utility in the Coop mechanism). In this case and as far as VCG is concerned, the non-truthful EVs had a decrease in their utility despite the fact that more of them were selected to charge. This happens due to the fact that the mechanism calculated higher prices for them. At the same time, the truthful EVs had a decrease in their utility due to the fact that fewer of them were charged. Thus, in the case of VCG, the agents do not have an incentive to misreport their valuation. These results confirm the theoretical evaluation presented in Section 5.2.
In contrast, when the Coop mechanism was used, the non-truthful EVs increased their utility by as more of them were selected to charge, while the truthful EVs faced a decrease in their utility due to the fact that fewer of them were charged. Given this, EVs, which are rational agents, have an incentive to misreport their valuations. For this reason, we further studied the Coop mechanism in a scenario where all EVs lied about their valuations. In this case, the utility of all EVs was reduced by due to the fact that fewer EVs were charged. Note that, due to the fact that all valuations shifted upwards by , the decrease in the total utility was not very high. Despite the fact that, in Coop, when all agents lie, they receive a worse utility; given the fact that, if only some agents lie the rest receive a worse payoff, the agents would be locked to the lying strategy, as in the prisoners’ dilemma game. At the same time, the profit for the station was increased by due to the fact that higher valuations give the option to the mechanism to select fewer EVs but with high valuations and reduce the imbalance cost. However, given the fact that the municipality stations’ goal is not to maximize profit but social welfare, there is an incentive to use the VCG mechanism instead of the Coop. Note that, in all cases, the statistical significance of the results was verified using t-tests.
8. Conclusions and Future Work
In this paper, we researched different mechanisms for scheduling EVs to charging stations and pricing their charging. In doing so, we present market-based techniques and we consider two approaches, for each one considering both the offline and an online variant. Initially, we developed a fixed-price mechanism, while, later, we developed a mechanism which is an extension of the well-known VCG mechanism. For this mechanism, we proved that truthtelling remains the dominant strategy. Both mechanisms were thoroughly evaluated in settings partially using real data, while using several different metrics. We observed that both had good scalability as they scaled to hundreds of agents and tenths of charging stations, while VCG could be more profitable for the stations, especially when they were highly congested, but provided lower utility to the EV agents. However, this mechanism was proven non-vulnerable to agents’ strategic behavior. Finally, both approaches could service of the EVs in the worst case.
As far as future work is concerned, we aim to further research the use of online mechanism design techniques for the problem of allocating EVs to stations and pricing their charging. Additionally, aiming to also see the problem from a smart-grid point of view, we consider adding to the ability to provide Vehicle-to-Grid (V2G) energy transfer. In this way, the EV batteries would be utilized as storage devices to increase renewable energy utilization and customer satisfaction [28]. Another interesting area of future work is to expand the stations by adding waiting queues. In this way, instead of leaving, EVs could wait in a queue until a charger became available. Additionally, aiming to minimize the imbalance cost, we aim to use machine learning techniques in order to predict future demand based on historical data. Finally, we focus on settings with a single owner of all EV stations in this paper and an interesting extension of this work would be the addition of multiple competing charging station providers.
Author Contributions
E.S.R. has conducted this research, executed the experiments and written the paper. E.H.G., S.S., S.D.R. and N.B. have advised E.S.R. for this research and reviewed the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research study was co-financed by Greece and the European Union (European Social Fund—ESF) through the Operational Programme “Human Resources Development, Education and Lifelong Learning” in the context of the project “Reinforcement of Postdoctoral Researchers-2nd Cycle” (MIS-5033021), implemented by State Scholarships Foundation (IKY).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Available upon request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Administration, U.E.I. Annual Energy Outlook 2021; Administration, U.E.I.: Washington, DC, USA, 2021. [Google Scholar]
- Vickrey, W. Counterspeculation, auctions, and competitive sealed tenders. J. Financ. 1961, 16, 8–37. [Google Scholar] [CrossRef]
- Clarke, E.H. Multipart pricing of public goods. Public Choice 1971, 11, 17–33. [Google Scholar] [CrossRef]
- Groves, T. Incentives in teams. Econom. J. Econom. Soc. 1973, 41, 617–631. [Google Scholar] [CrossRef]
- Rigas, E.S.; Gerding, E.; Stein, S.; Ramchurn, S.D.; Bassiliades, N. Mechanism Design for Efficient Allocation of Electric Vehicles to Charging Stations. In Proceedings of the 11th Hellenic Conference on Artificial Intelligence, Association for Computing Machinery, SETN 2020, New York, NY, USA, 2 September 2020; pp. 10–15. [Google Scholar] [CrossRef]
- Rigas, E.S.; Ramchurn, S.D.; Bassiliades, N.; Koutitas, G. Congestion management for urban EV charging systems. In Proceedings of the 2013 IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013; pp. 121–126. [Google Scholar] [CrossRef] [Green Version]
- Stein, S.; Gerding, E.; Robu, V.; Jennings, N.R. A Model-based Online Mechanism with Pre-commitment and Its Application to Electric Vehicle Charging. In Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems-Volume 2, International Foundation for Autonomous Agents and Multiagent Systems, AAMAS ’12, Valencina, Spain, 3–7 June 2012; pp. 669–676. [Google Scholar]
- Rigas, E.; Ramchurn, S.; Bassiliades, N. Managing Electric Vehicles in the Smart Grid Using Artificial Intelligence: A Survey. Intell. Transp. Syst. IEEE Trans. 2015, 16, 1619–1635. [Google Scholar] [CrossRef]
- Caramanis, M.; Foster, J. Management of electric vehicle charging to mitigate renewable generation intermittency and distribution network congestion. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 4717–4722. [Google Scholar] [CrossRef]
- Foster, J.; Caramanis, M. Optimal Power Market Participation of Plug-In Electric Vehicles Pooled by Distribution Feeder. Power Syst. IEEE Trans. 2013, 28, 2065–2076. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Hu, J.; Wang, H.; Wang, G.; Chan, K.W.; Qiu, J. Electric Vehicle Participated Electricity Market Model Considering Flexible Ramping Product Provisions. IEEE Trans. Ind. Appl. 2020, 56, 5868–5879. [Google Scholar] [CrossRef]
- Gonzalez Vaya, M.; Andersson, G. Optimal bidding strategy of a plug-in electric vehicle aggregator in day-ahead electricity markets. In Proceedings of the 2013 10th International Conference on the European Energy Market (EEM), Stockholm, Sweden, 27–31 May 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, J.; Qian, D. Risk-aware day-ahead scheduling and real-time dispatch for plug-in electric vehicles. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012; pp. 3026–3031. [Google Scholar] [CrossRef]
- Van Slyke, R.; Wets, R. L-Shaped Linear Programs with Applications to Optimal Control and Stochastic Programming. SIAM J. Appl. Math. 1969, 17, 638–663. [Google Scholar] [CrossRef]
- Soares, J.; Ghazvini, M.A.F.; Borges, N.; Vale, Z. Dynamic electricity pricing for electric vehicles using stochastic programming. Energy 2017, 122, 111–127. [Google Scholar] [CrossRef] [Green Version]
- Perez-Diaz, A.; Gerding, E.; McGroarty, F. Coordination and payment mechanisms for electric vehicle aggregators. Appl. Energy 2018, 212, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Gerding, E.H.; Robu, V.; Stein, S.; Parkes, D.C.; Rogers, A.; Jennings, N.R. Online Mechanism Design for Electric Vehicle Charging. In AAMAS-11-Volume 2; International Foundation for Autonomous Agents and Multiagent Systems: Richland, South Carolina, 2011; pp. 811–818. [Google Scholar]
- Gerding, E.H.; Stein, S.; Robu, V.; Zhao, D.; Jennings, N.R. Two-sided Online Markets for Electric Vehicle Charging. In Proceedings of the 2013 International Conference on Autonomous Agents and Multi-agent Systems, International Foundation for Autonomous Agents and Multiagent Systems, Richland, South Carolina, 5 May 2013; pp. 989–996. [Google Scholar]
- Jahangir, H.; Gougheri, S.S.; Vatandoust, B.; Golkar, M.A.; Ahmadian, A.; Hajizadeh, A. Plug-in Electric Vehicle Behavior Modeling in Energy Market: A Novel Deep Learning-Based Approach With Clustering Technique. IEEE Trans. Smart Grid 2020, 11, 4738–4748. [Google Scholar] [CrossRef]
- Gonzalez Vaya, M.; Andersson, G. Centralized and decentralized approaches to smart charging of plug-in Vehicles. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Ghosh, A.; Aggarwal, V. Control of Charging of Electric Vehicles through Menu-Based Pricing. IEEE Trans. Smart Grid 2017, 9, 5918–5929. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Dong, Z.; Chen, G.; Zhou, B.; Zhang, J.; Yu, X. Data-Driven Planning of Electric Vehicle Charging Infrastructure: A Case Study of Sydney, Australia. IEEE Trans. Smart Grid 2021, 12, 3289–3304. [Google Scholar] [CrossRef]
- Kalashnikov, V.V.; Ríos-Mercado, R.Z. A natural gas cash-out problem: A bilevel programming framework and a penalty function method. Optim. Eng. 2006, 7, 403–420. [Google Scholar] [CrossRef]
- Kovacic, M.; Sarler, B. Genetic programming prediction of the natural gas consumption in a steel plant. Energy 2014, 66, 273–284. [Google Scholar] [CrossRef]
- Brekken, T.K.A.; Yokochi, A.; von Jouanne, A.; Yen, Z.Z.; Hapke, H.M.; Halamay, D.A. Optimal Energy Storage Sizing and Control for Wind Power Applications. IEEE Trans. Sustain. Energy 2011, 2, 69–77. [Google Scholar] [CrossRef]
- Wooldridge, M. An Introduction to Multiagent Systems; John Wiley & Sons: Hoboken, NY, USA, 2009. [Google Scholar]
- Shoham, Y.; Leyton-Brown, K. Multiagent Systems: Algorithmic, Game-Theoretic, and Logical Foundations; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Koufakis, A.M.; Rigas, E.S.; Bassiliades, N.; Ramchurn, S.D. Towards an optimal EV charging scheduling scheme with V2G and V2V energy transfer. In Proceedings of the 2016 IEEE International Conference on Smart Grid Communications (SmartGridComm), Sydney, NSW, Australia, 6–9 November 2016; pp. 302–307. [Google Scholar] [CrossRef]
Figure 1.
Online EV to charging station scheduling.

Figure 2.
Execution times–VCG.

Figure 3.
Execution times–Fixed.

Figure 4.
Average number of serviced EVs.

Figure 5.
Average total utility.

Figure 6.
Average price paid by the EVs.

Figure 7.
Total profit for the mechanism.

Figure 8.
Total profit—variable number of stations.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison to the state of the art.
| [7] | [18] | [20] | [6] | [21] | This Work | |
|---|---|---|---|---|---|---|
| Load balancing | No | No | Yes | Yes | No | Yes |
| Social welfare maximization | Yes | Yes | No | No | Yes | Yes |
| Renewable energy | No | No | No | No | No | No |
| Offline execution | Yes | Yes | Yes | Yes | No | Yes |
| Online execution | No | No | No | Yes | Yes | Yes |
Table 2.
Description of mechanism properties.
| Term | Explanation |
|---|---|
| Individual Rationality | No agent is asked to pay a price higher than their personal valuation. |
| Dominant Strategy Incentive Compatibility | Truthful reporting of the agent’s preferences is always the agent’s optimal strategy. |
| Efficiency | The resources are allocated to the agents with the highest utility. |
| Budget Balance | In strong budget balance, the mechanism has neither profit nor loss, while, in weak budget balance, it may have a profit. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Rigas, E.S.; Gerding, E.H.; Stein, S.; Ramchurn, S.D.; Bassiliades, N. Mechanism Design for Efficient Offline and Online Allocation of Electric Vehicles to Charging Stations. Energies 2022, 15, 1660. https://doi.org/10.3390/en15051660
AMA Style
Rigas ES, Gerding EH, Stein S, Ramchurn SD, Bassiliades N. Mechanism Design for Efficient Offline and Online Allocation of Electric Vehicles to Charging Stations. Energies. 2022; 15(5):1660. https://doi.org/10.3390/en15051660
Chicago/Turabian StyleRigas, Emmanouil S., Enrico H. Gerding, Sebastian Stein, Sarvapali D. Ramchurn, and Nick Bassiliades. 2022. "Mechanism Design for Efficient Offline and Online Allocation of Electric Vehicles to Charging Stations" Energies 15, no. 5: 1660. https://doi.org/10.3390/en15051660
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.