
Optimal Strategy for the Improvement of the Overall Performance of Dual-Axis Solar Tracking Systems

 , , , ,
, , , , 
Abstract
:1. Introduction
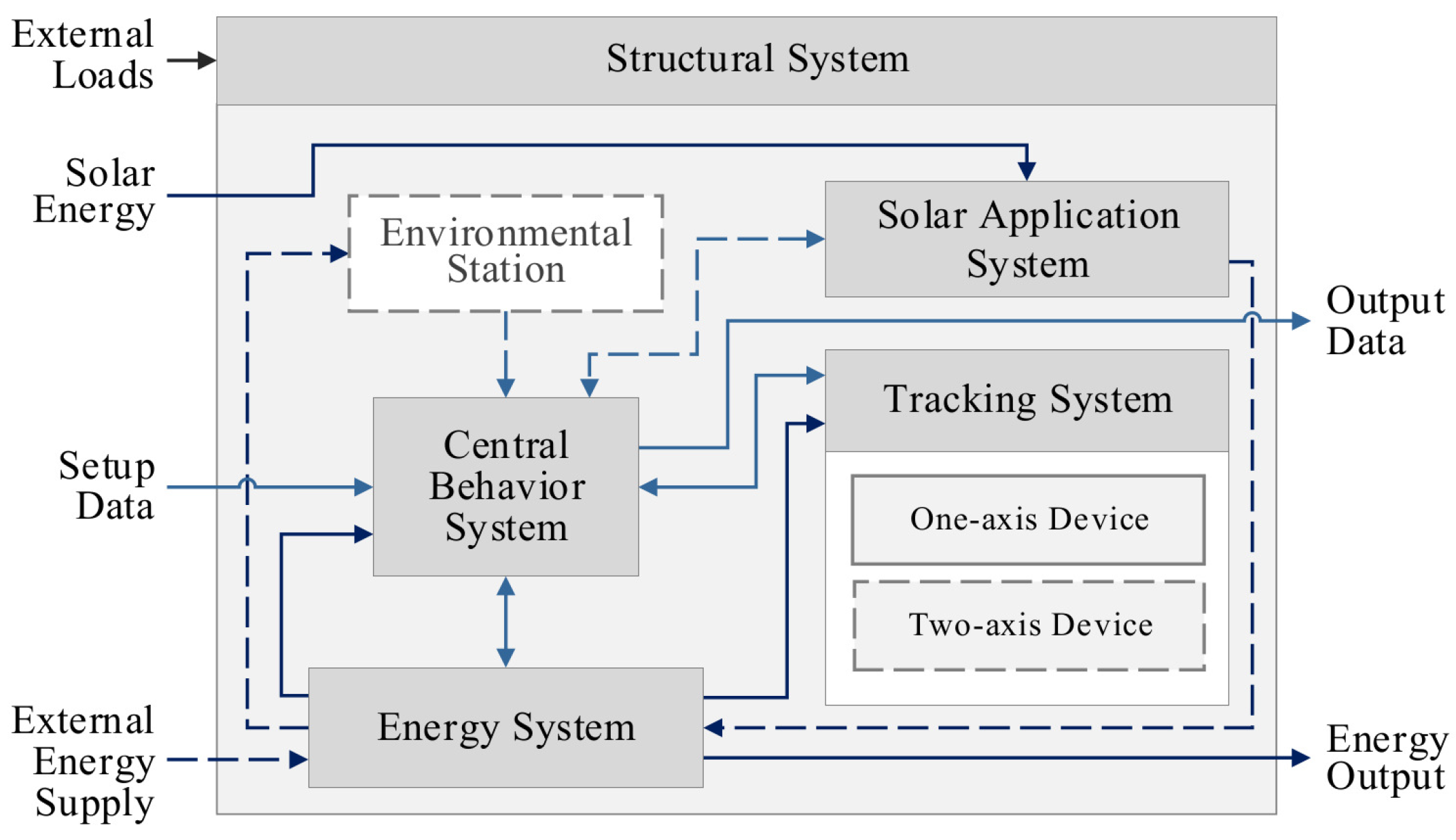
2. Physical Architecture of Solar Tracking Systems
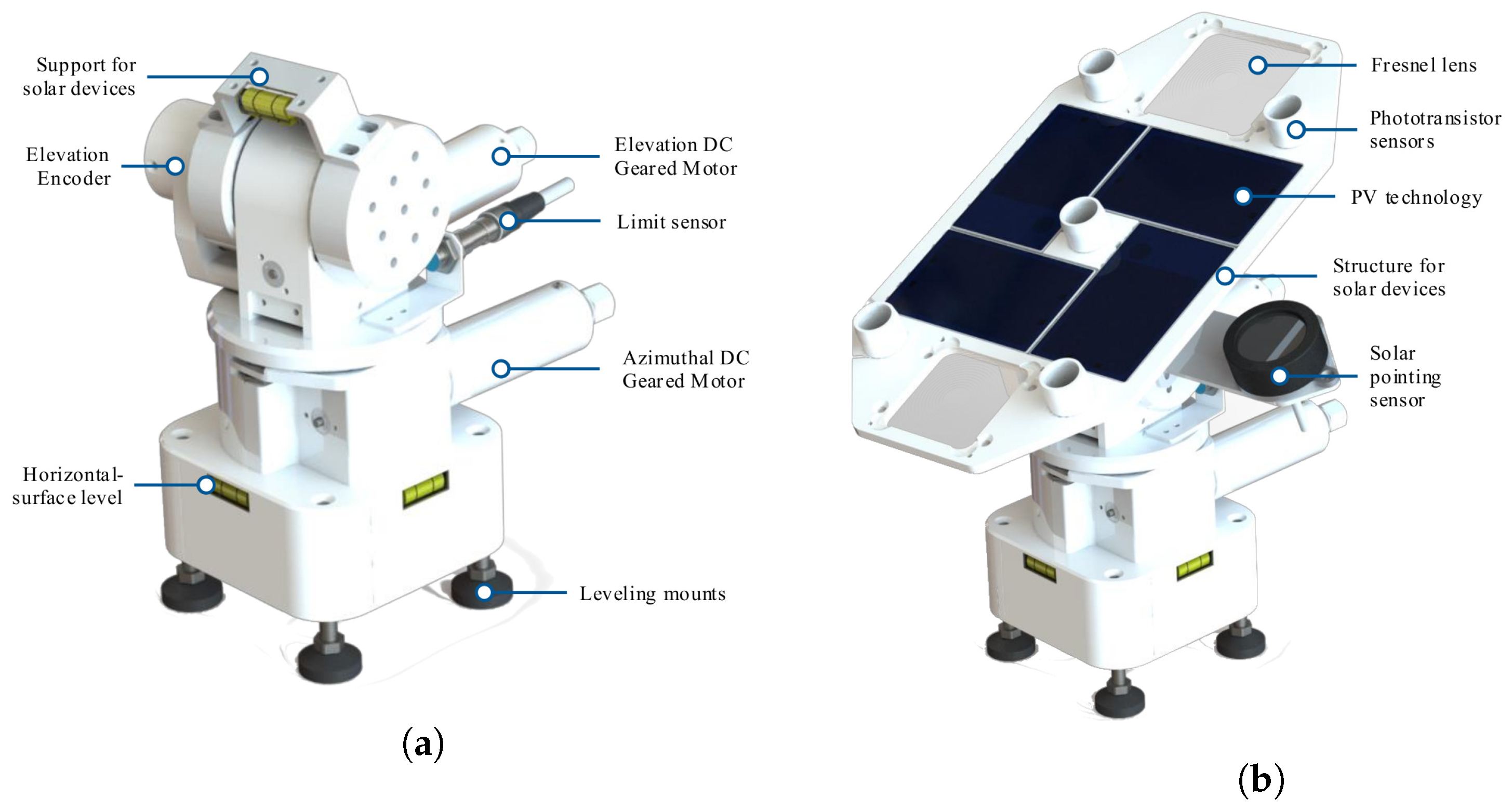
- Solar Application System. Is the solar technology that the solar tracker will use, the possible applications are Photovoltaic Systems (PVS), Concentrated Photovoltaic Systems (CPS), Thermal Systems (TS), Desalination Systems (DS), and special applications such as experimental platforms for calibration of solar sensors or measuring instruments. Each technology has special requirements, like the acceptance angle, which significantly affects the design process.
- Tracking System. It oversees following the solar path autonomously, fundamental purpose of the main system. Based on the number of axes required, a module can be defined for each one. The subsystem is integrated by an actuator, power transmission mechanisms, joint sensors, limit sensors, and electronic devices for actuators control.
- Central Behavior System. It is responsible for the management of the behavior and energy strategies. It is integrated by the following components: Human–Machine Interface (HMI), programmable controllers, data loggers, and communication devices. The setup data include the selection of the operational mode, the tracker location, the day number, and the data required for the control of the system. The output data will depend on the tracker application and may include energy generation, energy consumption, tracking error, system status, and application data.
- Energy System. It includes the following components: power supply elements, power monitoring and converter devices, wiring devices, power protection devices, and, when applicable, power storage devices.
- Structural System. This system supports the internal and external loads, including the environmental conditions such as wind, temperature, rain, dust, among others.
3. Problem Statement
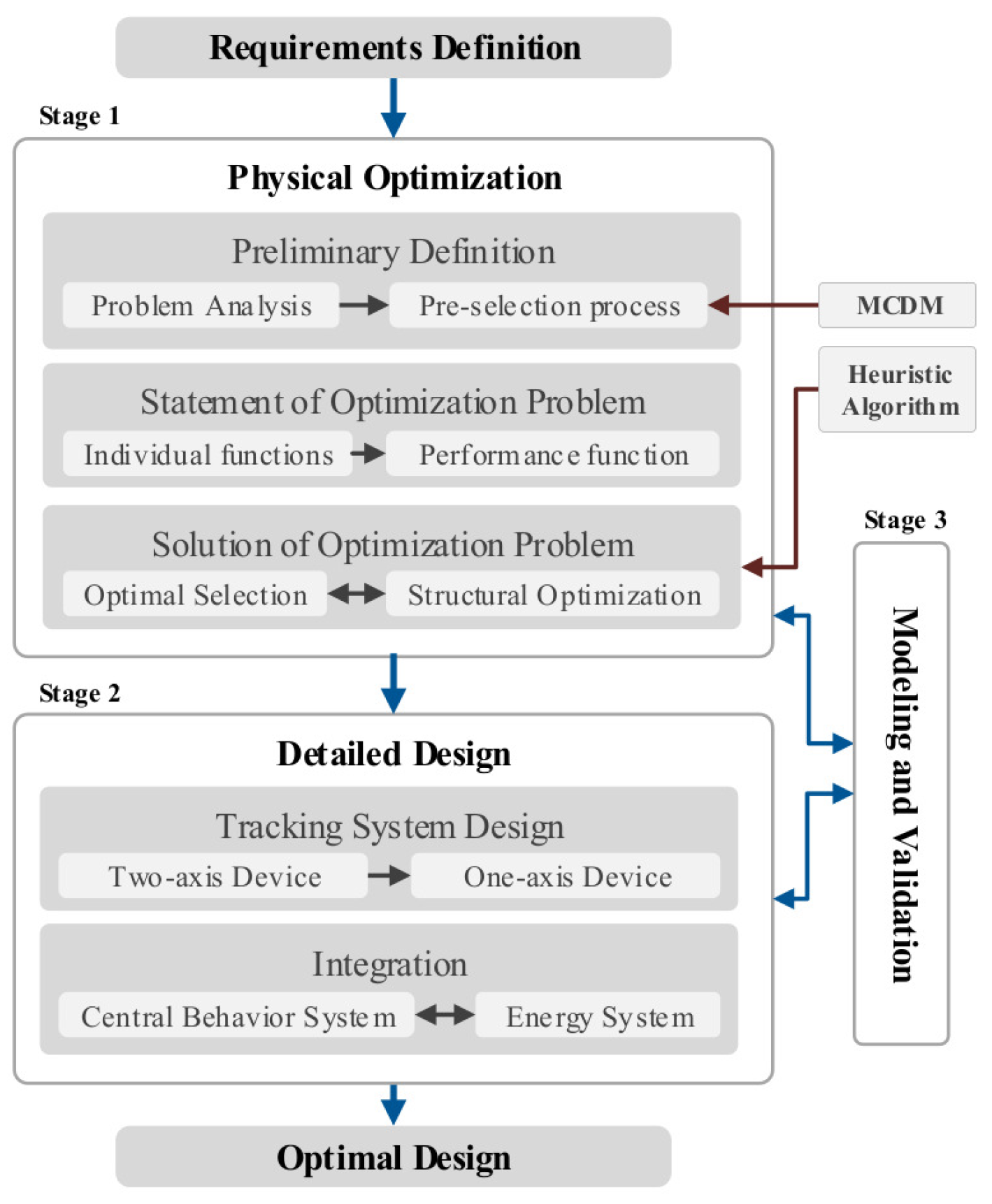
- Physical Optimization: The performance of the STS is affected by the performance of physical components, such as actuators and transmission elements, and by the geometric characteristics of the tracker. Optimal design is the selection of the physical components and the definition of the structural design, that minimize or maximize the performance function P. Therefore, the physical optimization can be defined as a Multi-objective Optimization Problem (MOP) [36], stated as follows:subject towhere is the overall performance function, are the individual objective functions that represent the energy consumption and the tracking error, and and are the inequality constraints and equality constraints, respectively. The individual objective functions and the constraints expressions are any real valued function defined by the design parameters, and they can be piecewise, continuous, or non-continuous functions. The design vector is , , where are continuous variables of the geometric characteristics and are discrete variables of the parameters of the physical components. All the design variables must be bounded, sas they are related to the system implementation, representing real limitations such as sizes, tolerances, electrical power, among others. First, a pre-selection process is required to define a set of physical components that satisfy the system requirements, a MCDM must be used for the evaluation, being Multi-Attribute Utility Theory, Analytic Hierarchy Process, Fuzzy Set Theory, Goal Programming, Simple Additive Weighting, among others [37]. Second, the designer must define the individual objective functions according to the system requirements, that depict the overall system performance, establishing the overall performance function . Finally, the optimization problem must be solved simultaneously, searching solutions for the optimal selection and for the optimal structural design.
- Detailed Design: It consists in the design of the axis devices, first with the second axis, and second with the first one. Once both modules are validated, the other systems must be detailed (see Figure 1). Finally, the integration process is carried out, it begins with the hardware integration and it ends with the software integration.
- Modeling and Validation: The modeling process consists of representing the STS from different approaches, at least the following models are required for the integral optimization: kinematic, dynamic, structural, tracking, and energy models, respectively. The validation is the process to determine if the suitable system has been developed [38], demonstrating that the STS fulfills the design purposes and the requirements in the desired environment. Commonly, the validations are supported by computational programs, obtaining numerical analysis and results. Some of the required validations are the following: energy balance, tracking error, structural analysis, and hardware–software validations.
4. Case Study
4.1. Physical Optimization (Stage 1)
4.1.1. Preliminary Definition
Problem Analysis
Pre-Selection Process
- Pre-selection of Transmission Components: The following types of transmissions were evaluated: Parallel shaft gears, planetary gears, harmonic-drive gears, worm gears, belt transmissions, and recirculating ball spindle. The data presented by Isermann in [41] are used for the definition of the criteria, being (1) Overall efficiency, (2) backlash, (3) self-locking device, (4) maintenance period, (5) maintenance difficulty, (6) additional components for reduce the backlash, (7) additional components for installation, (8) reduction ratio, (9) direct coupling, and (10) required space for installation. The expression (10) shows the values of the priority vector . The worm-gears mechanism is the most suitable for the criteria, and a single-thread worm is recommended. The lead angle in the worm-gears must be less than for self-locking condition.
- Pre-selection of Actuators: The possible actuators must have high conversion efficiency and low energy consumption. To increase the power transmission and to reduce the required power energy, actuators with gearboxes are considered in the selection process. The following types of electrical actuators were evaluated: DC excitation coil, DC permanent excitation, DC iron-less rotor, DC Brushless, and DC stepper motor. The data presented by Jung in [42] are used, being the following criteria: (1) power range, (2) rated voltage, (3) efficiency, and (4) control speed. The expression (11) shows the values of the priority vector . The DC permanent excitation motor is that best meets the selection criteria.
4.1.2. Statement of Optimization Problem
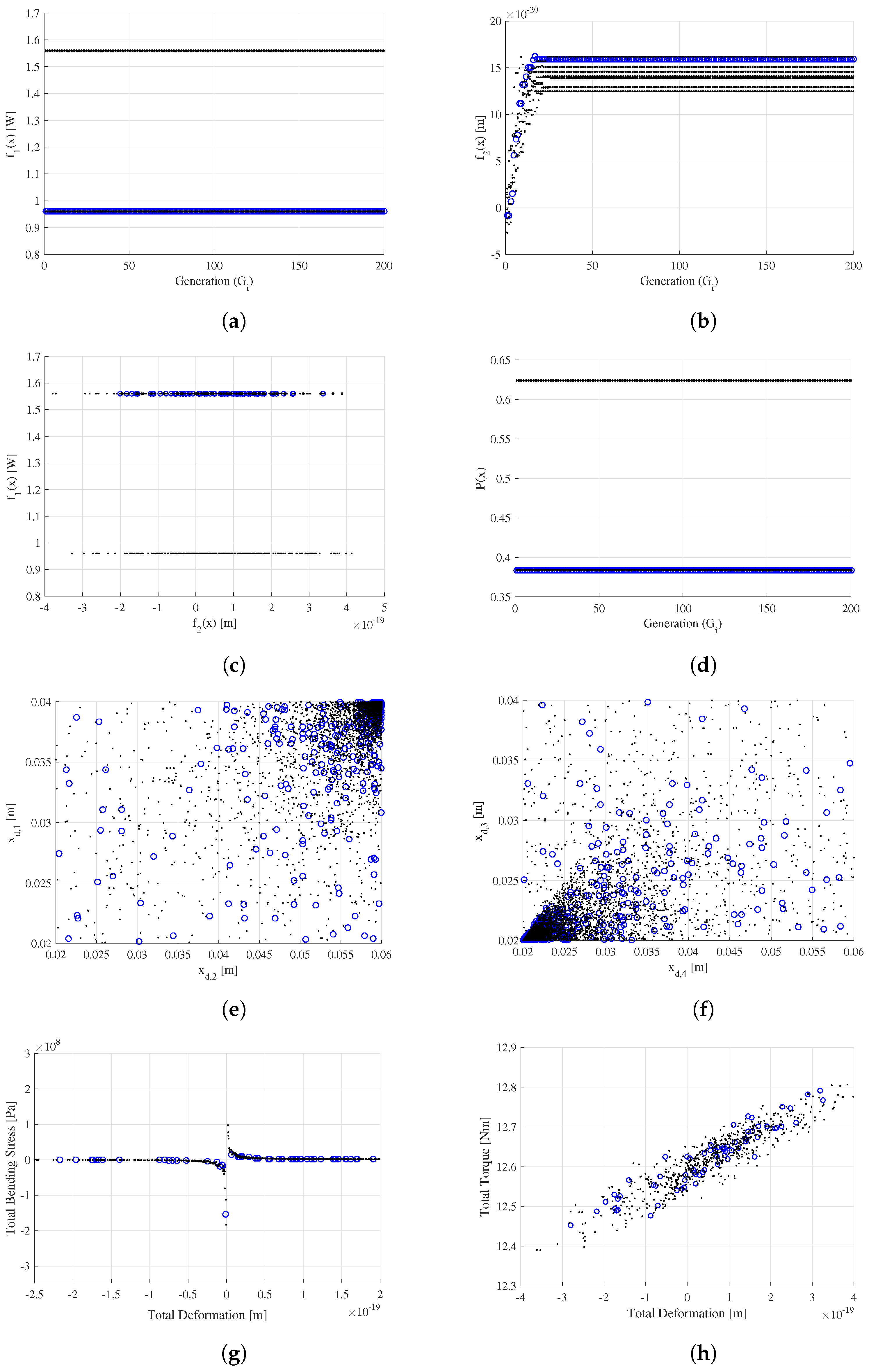
4.1.3. Solution of Optimization Problem
4.2. Detailed Design (Stage 2)
5. Results and Discussion
5.1. Simulation and Experimental Results
- The location was carried out at the Instituto de Energía Solar, Madrid, Spain, at the latitude and longitude . The day 20 June 2018, was considered, where the sunrise time was at 06:44:07, the sunset time was at 21:48:35, and the noon time was at 14:16:20, for a total of h of sunlight. The experimental test began at 08:12:00 and ended at 19:53:00, with a total duration of 11.68 h as the solar pointing sensor is activated with a minimum of 300 W/m.
- For the open-loop tracking method, the Solar Position Algorithm (SPA) was used [47]. The trajectory was segmented in 788 steps for azimuthal movement, and 434 for elevation movements. Based on the dynamic model of the STS presented in [33], a Generalized Proportional-Integral controller was developed [48]. This controller allows to obtain acceptable results with a low computational cost, which is reflected in savings of of energy consumption [33].
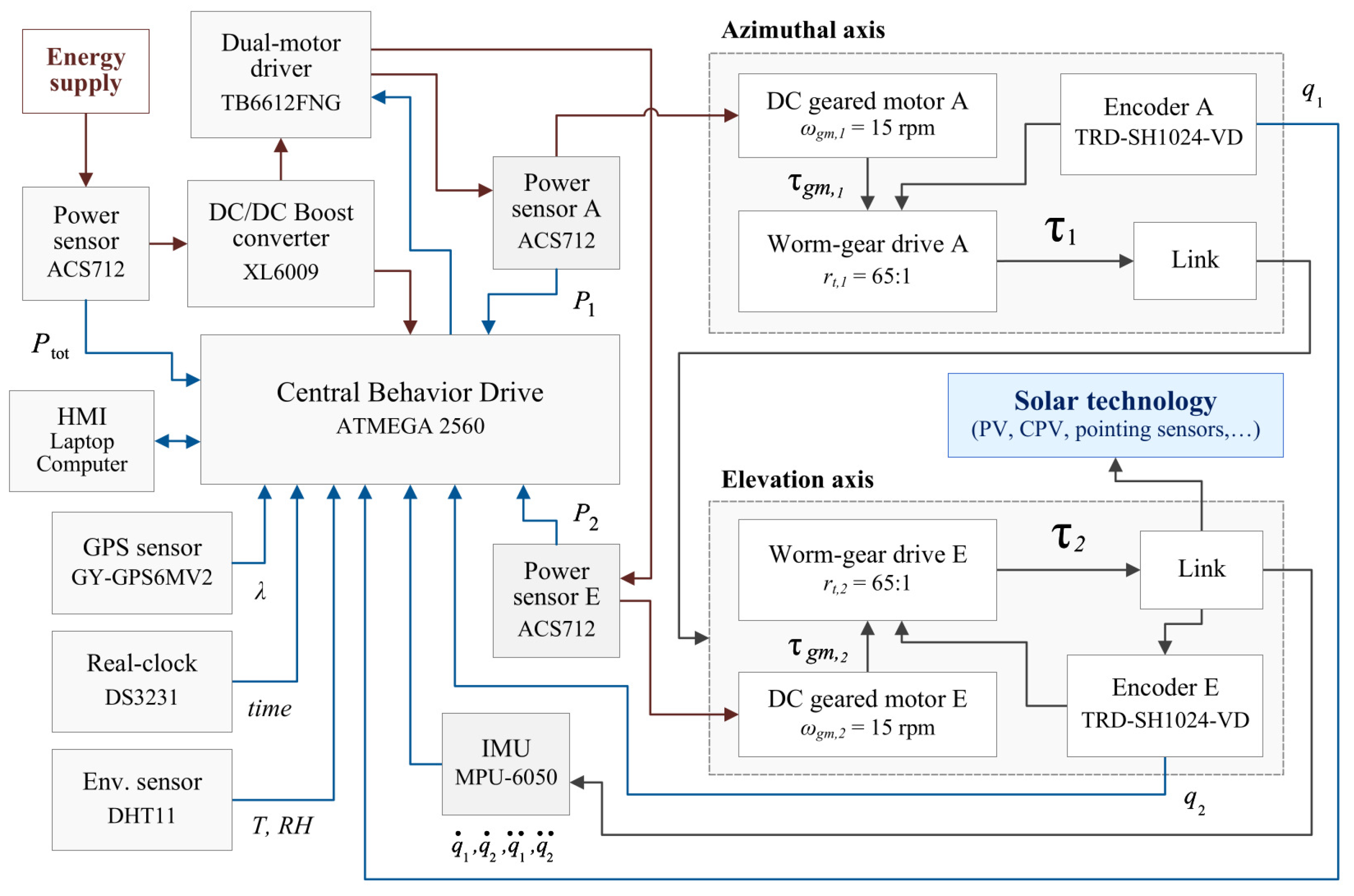
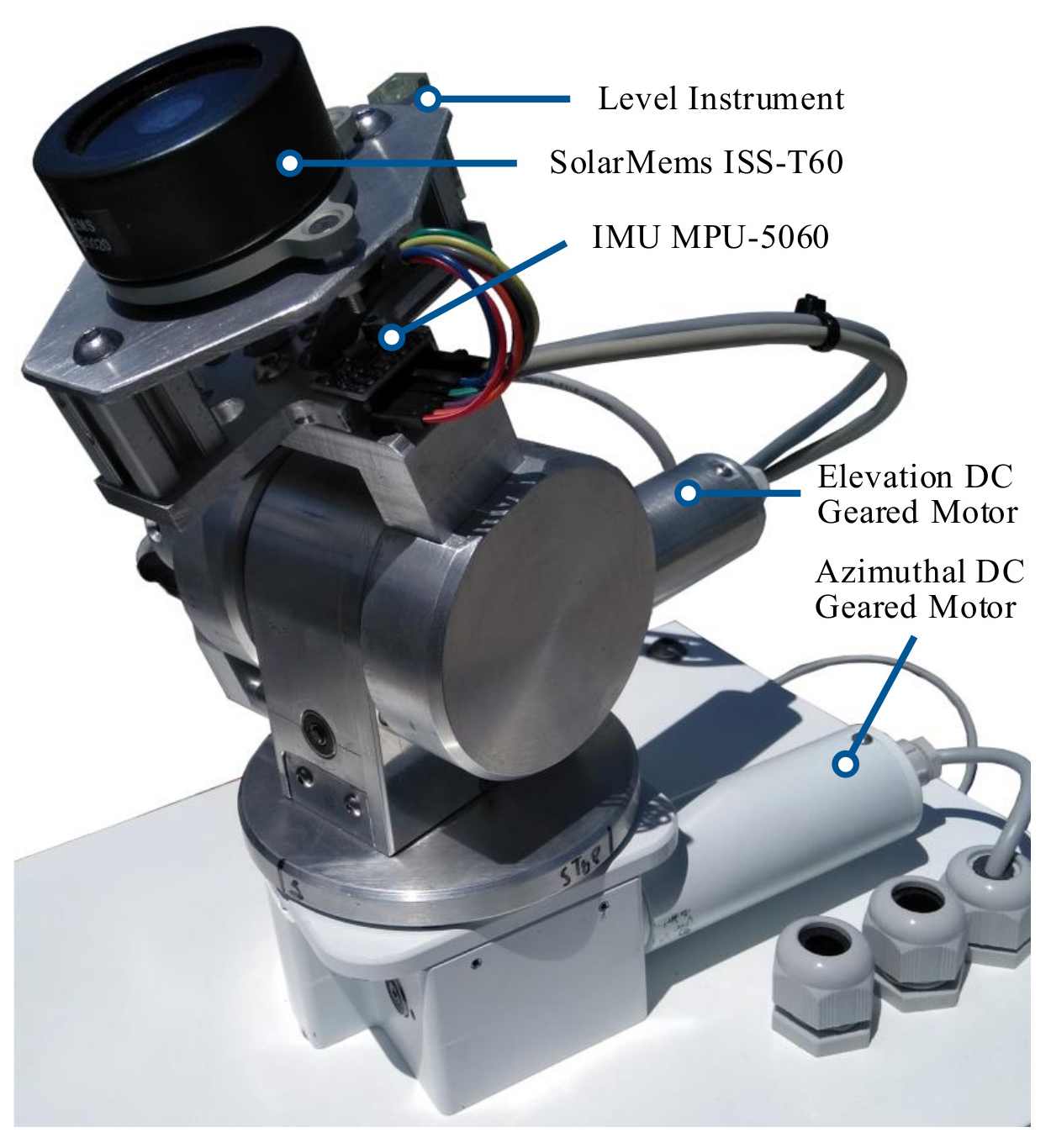
- A pointing sensor was used for the measurement of the experimental tracking error. The SolarMems® sensor was connected to a laptop for the recording of the data. And, for the measurement of the energy consumption, three ACS712 power sensors were used at the measure points, as shown in Figure 9. These sensors were previously calibrated with a multimeter model Fluke 289 true RMS. The energy consumption was estimated by the following expression:where is the energy consumption of the axes, defined bywhere and are the electrical power of the azimuthal and elevation axes, respectively. and are the time where the motors are active, considering that , due to the trajectories and the number of steps for the tracking path are different for each axis. It is not necessary to consider the idle energy consumption at the holding position power because of the self-locking mechanisms. is the energy required for the operation of the hardware devices such as sensors, motor drivers, electronic devices, etc.; it can be defined with the following expression:where is the electrical power of the hardware devices, and and are the operation time and idle time, respectively. The idle time is defined as the period after tracking operation is completed, and the tracker is in a specific position waiting to move to the next position, the electronic devices are continued consuming energy for data processing, and for measuring and monitoring environmental parameters.
5.2. Comparative Analysis
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AHP | Analytic Hierarchy Process |
| CO | Carbon dioxide |
| CPS | Concentrated Photovoltaic Systems |
| CPV | Concentrated Photovoltaic |
| DS | Desalination Systems |
| DE | Differential Evolution |
| GhG | Greenhouse Gas |
| HMI | Human–Machine Interface |
| MCDM | Multi-Criteria Decision-Making |
| MOP | Multi-objective Optimization Problem |
| NOCT | Normal Operative Cell Temperature |
| PVS | Photovoltaic Systems |
| SPA | Solar Position Algorithm |
| STC | Standard Test Conditions |
| STS | Solar Tracking Systems |
| TS | Thermal Systems |
References
- REN21. Renewables 2020 Global Status Report; Technical Report; REN21: Paris, France, 2020. [Google Scholar]
- Sofia, S.E.; Wang, H.; Bruno, A.; Cruz-Campa, J.L.; Buonassisi, T.; Peters, I.M. Roadmap for cost-effective, commercially-viable perovskite silicon tandems for the current and future PV market. Sustain. Energy Fuels 2020, 4, 852–862. [Google Scholar] [CrossRef] [Green Version]
- Stolterfoht, M.; Grischek, M.; Caprioglio, P.; Wolff, C.M.; Gutierrez-Partida, E.; Peña-Camargo, F.; Rothhardt, D.; Zhang, S.; Raoufi, M.; Wolansky, J.; et al. How to quantify the efficiency potential of neat perovskite films: Perovskite semiconductors with an implied efficiency exceeding 28%. Adv. Mater. 2020, 32, 2000080. [Google Scholar] [CrossRef] [PubMed]
- Jiang, X.; Zang, Z.; Zhou, Y.; Li, H.; Wei, Q.; Ning, Z. Tin Halide Perovskite Solar Cells: An Emerging Thin-Film Photovoltaic Technology. Acc. Mater. Res. 2021, 2, 210–219. [Google Scholar] [CrossRef]
- Hasan, A.; Dincer, I. A new performance assessment methodology of bifacial photovoltaic solar panels for offshore applications. Energy Convers. Manag. 2020, 220, 112972. [Google Scholar] [CrossRef]
- Muehleisen, W.; Loeschnig, J.; Feichtner, M.; Burgers, A.; Bende, E.; Zamini, S.; Yerasimou, Y.; Kosel, J.; Hirschl, C.; Georghiou, G. Energy yield measurement of an elevated PV system on a white flat roof and a performance comparison of monofacial and bifacial modules. Renew. Energy 2021, 170, 613–619. [Google Scholar] [CrossRef]
- Mohammadnia, A.; Ziapour, B.M. Investigation effect of a spectral beam splitter on performance of a hybrid CPV/Stirling/TEG solar power system. Appl. Therm. Eng. 2020, 180, 115799. [Google Scholar] [CrossRef]
- Valera, Á.; Rodrigo, P.M.; Almonacid, F.; Fernández, E.F. Efficiency improvement of passively cooled micro-scale hybrid CPV-TEG systems at ultra-high concentration levels. Energy Convers. Manag. 2021, 244, 114521. [Google Scholar] [CrossRef]
- Albert, P.; Jaouad, A.; Hamon, G.; Volatier, M.; Valdivia, C.E.; Deshayes, Y.; Hinzer, K.; Béchou, L.; Aimez, V.; Darnon, M. Miniaturization of InGaP/InGaAs/Ge solar cells for micro-concentrator photovoltaics. Prog. Photovolt. Res. Appl. 2021, 29, 990–999. [Google Scholar] [CrossRef]
- Jost, N.; Vallerotto, G.; Tripoli, A.; L’Eprevier, B.D.; Domínguez, C.; Askins, S.; Antón, I. Molded glass arrays for micro-CPV applications with very good performance. In AIP Conference Proceedings; AIP Publishing LLC: College Park, PA, USA, 2020; Volume 2298, p. 050003. [Google Scholar]
- Maliani, O.; Bekkaoui, A.; Baali, E.; Guissi, K.; El Fellah, Y.; Errais, R. Investigation on novel design of solar still coupled with two axis solar tracking system. Appl. Therm. Eng. 2020, 172, 115144. [Google Scholar] [CrossRef]
- Meng, X.l.; Liu, C.l.; Bai, X.h.; Kong, D.h.; Du, K. Improvement of the performance of parabolic trough solar concentrator using freeform optics and CPV/T design. AIMS Energy 2021, 9, 286–304. [Google Scholar] [CrossRef]
- Vallerotto, G.; Victoria, M.; Jost, N.; Askins, S.; Domínguez, C.; Herrero, R.; Antón, I. Comparison of achromatic doublet on glass Fresnel lenses for concentrator photovoltaics. Opt. Express 2021, 29, 20601–20616. [Google Scholar] [CrossRef]
- Wang, G.; Wang, F.; Shen, F.; Jiang, T.; Chen, Z.; Hu, P. Experimental and optical performances of a solar CPV device using a linear Fresnel reflector concentrator. Renew. Energy 2020, 146, 2351–2361. [Google Scholar] [CrossRef]
- Barbón, A.; Bayón-Cueli, C.; Bayón, L.; Ayuso, P.F. Influence of solar tracking error on the performance of a small-scale linear Fresnel reflector. Renew. Energy 2020, 162, 43–54. [Google Scholar] [CrossRef]
- Du, X.; Li, Y.; Wang, P.; Ma, Z.; Li, D.; Wu, C. Design and optimization of solar tracker with u-pru-pus parallel mechanism. Mech. Mach. Theory 2021, 155, 104107. [Google Scholar] [CrossRef]
- Morón, C.; Ferrández, D.; Saiz, P.; Vega, G.; Díaz, J.P. New prototype of photovoltaic solar tracker based on arduino. Energies 2017, 10, 1298. [Google Scholar] [CrossRef]
- Alexandru, C. Optimizing the mechanical device of a mono-axial sun tracking mechanism. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 184, p. 01001. [Google Scholar]
- Lim, B.H.; Lim, C.S.; Li, H.; Hu, X.L.; Chong, K.K.; Zong, J.L.; Kang, K.; Tan, W.C. Industrial design and implementation of a large-scale dual-axis sun tracker with a vertical-axis-rotating-platform and multiple-row-elevation structures. Sol. Energy 2020, 199, 596–616. [Google Scholar] [CrossRef]
- Jamroen, C.; Komkum, P.; Kohsri, S.; Himananto, W.; Panupintu, S.; Unkat, S. A low-cost dual-axis solar tracking system based on digital logic design: Design and implementation. Sustain. Energy Technol. Assess. 2020, 37, 100618. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, J.; Yang, X. Design and performance analysis of a solar tracking system with a novel single-axis tracking structure to maximize energy collection. Appl. Energy 2020, 264, 114647. [Google Scholar] [CrossRef]
- Quesada, G.; Guillon, L.; Rousse, D.R.; Mehrtash, M.; Dutil, Y.; Paradis, P.L. Tracking strategy for photovoltaic solar systems in high latitudes. Energy Convers. Manag. 2015, 103, 147–156. [Google Scholar] [CrossRef]
- Alexandru, C. Optimal design of the dual-axis tracking system used for a PV string platform. J. Renew. Sustain. Energy 2019, 11, 043501. [Google Scholar] [CrossRef]
- Marcu, A.; Alexandru, C.; Barbu, I. Dynamic optimization of a dual-axis solar tracker for PV modules. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 514, p. 012037. [Google Scholar]
- Gutierrez, S.; Rodrigo, P.M.; Alvarez, J.; Acero, A.; Montoya, A. Development and Testing of a Single-Axis Photovoltaic Sun Tracker through the Internet of Things. Energies 2020, 13, 2547. [Google Scholar] [CrossRef]
- Fuentes-Morales, R.F.; Diaz-Ponce, A.; Peña-Cruz, M.I.; Rodrigo, P.M.; Valentín-Coronado, L.M.; Martell-Chavez, F.; Pineda-Arellano, C.A. Control algorithms applied to active solar tracking systems: A review. Sol. Energy 2020, 212, 203–219. [Google Scholar] [CrossRef]
- Fernández-Ahumada, L.; Ramírez-Faz, J.; López-Luque, R.; Varo-Martínez, M.; Moreno-García, I.; de la Torre, F.C. Influence of the design variables of photovoltaic plants with two-axis solar tracking on the optimization of the tracking and backtracking trajectory. Sol. Energy 2020, 208, 89–100. [Google Scholar] [CrossRef]
- Mi, Z.; Chen, J.; Chen, N.; Bai, Y.; Fu, R.; Liu, H. Open-loop solar tracking strategy for high concentrating photovoltaic systems using variable tracking frequency. Energy Convers. Manag. 2016, 117, 142–149. [Google Scholar] [CrossRef]
- Sallaberry, F.; Pujol-Nadal, R.; Larcher, M.; Rittmann-Frank, M.H. Direct tracking error characterization on a single-axis solar tracker. Energy Convers. Manag. 2015, 105, 1281–1290. [Google Scholar] [CrossRef]
- Flores-Hernández, D.; Palomino-Resendiz, S.; Lozada-Castillo, N.; Luviano-Juárez, A.; Chairez, I. Mechatronic design and implementation of a two axes sun tracking photovoltaic system driven by a robotic sensor. Mechatronics 2017, 47, 148–159. [Google Scholar] [CrossRef]
- Shams, M.H.; Kia, M.; Heidari, A.; Zhang, D. Optimal design of photovoltaic solar systems considering shading effect and hourly radiation using a modified PSO algorithm. Simulation 2019, 95, 931–939. [Google Scholar] [CrossRef]
- Aste, N.; Del Pero, C.; Leonforte, F.; Manfren, M. A simplified model for the estimation of energy production of PV systems. Energy 2013, 59, 503–512. [Google Scholar] [CrossRef]
- Flores-Hernandez, D.A.; Palomino-Resendiz, S.I.; Luviano-Juárez, A.; Lozada-Castillo, N.; Gutierrez-Frias, O. A heuristic approach for tracking error and energy consumption minimization in solar tracking systems. IEEE Access 2019, 7, 52755–52768. [Google Scholar] [CrossRef]
- Buede, D.M.; Miller, W.D. The Engineering Design of Systems: Models and Methods; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Stafford, B.; Davis, M.; Chambers, J.; Martínez, M.; Sanchez, D. Tracker accuracy: Field experience, analysis, and correlation with meteorological conditions. In Proceedings of the 2009 34th IEEE Photovoltaic Specialists Conference (PVSC), Philadelphia, PA, USA, 7–12 June 2009; pp. 002256–002259. [Google Scholar]
- Rao, S.S. Engineering Optimization: Theory and Practice; John Wiley & Sons: New Delhi, India, 2019. [Google Scholar]
- Velasquez, M.; Hester, P.T. An analysis of multi-criteria decision making methods. Int. J. Oper. Res. 2013, 10, 56–66. [Google Scholar]
- Hirshorn, S.; Voss, L.; Bromley, L. NASA Systems Engineering Handbook; NASA Technical Reports Server: Washington, DC, USA, 2017.
- McKenzie, W.M. Examples in Structural Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Saaty, T.L. Decision making with the analytic hierarchy process. Int. J. Serv. Sci. 2008, 1, 83–98. [Google Scholar] [CrossRef] [Green Version]
- Isermann, R. Mechatronic Systems: Fundamentals; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Jung, R.; Schneider, J. Elektische Kleinmotoren. Konstruktions-katalog und Marktübersicht. Feinw. Meßtechnik 1984, 92, 153–165. [Google Scholar]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Villarreal-Cervantes, M.G.; Rodríguez-Molina, A.; García-Mendoza, C.V.; Peñaloza-Mejía, O.; Sepúlveda-Cervantes, G. Multi-Objective On-Line Optimization Approach for the DC Motor Controller Tuning Using Differential Evolution. IEEE Access 2017, 5, 20393–20407. [Google Scholar] [CrossRef]
- Civicioglu, P.; Besdok, E. A conceptual comparison of the Cuckoo-search, particle swarm optimization, differential evolution and artificial bee colony algorithms. Artif. Intell. Rev. 2013, 39, 315–346. [Google Scholar] [CrossRef]
- Deb, K. An efficient constraint handling method for genetic algorithms. Comput. Methods Appl. Mech. Eng. 2000, 186, 311–338. [Google Scholar] [CrossRef]
- Reda, I.; Andreas, A. Solar position algorithm for solar radiation applications. Sol. Energy 2004, 76, 577–589. [Google Scholar] [CrossRef]
- Sira-Ramírez, H. Sliding Modes, Δ-Modulators, and Generalized Proportional Integral Control of Linear Systems. Asian J. Control 2003, 5, 467–475. [Google Scholar] [CrossRef]
- Zaini, N.; Ab Kadir, M.; Izadi, M.; Ahmad, N.; Radzi, M.; Azis, N. The effect of temperature on a mono-crystalline solar PV panel. In Proceedings of the 2015 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 October 2015; pp. 249–253. [Google Scholar]
- Machniewicz, A.; Knera, D.; Heim, D. Effect of transition temperature on efficiency of PV/PCM panels. Energy Procedia 2015, 78, 1684–1689. [Google Scholar] [CrossRef] [Green Version]
- Elibol, E.; Özmen, Ö.T.; Tutkun, N.; Köysal, O. Outdoor performance analysis of different PV panel types. Renew. Sustain. Energy Rev. 2017, 67, 651–661. [Google Scholar] [CrossRef]
- Du, Y.; Fell, C.J.; Duck, B.; Chen, D.; Liffman, K.; Zhang, Y.; Gu, M.; Zhu, Y. Evaluation of photovoltaic panel temperature in realistic scenarios. Energy Convers. Manag. 2016, 108, 60–67. [Google Scholar] [CrossRef]
- Skoplaki, E.; Palyvos, J.A. On the temperature dependence of photovoltaic module electrical performance: A review of efficiency/power correlations. Sol. Energy 2009, 83, 614–624. [Google Scholar] [CrossRef]
- Lazaroiu, G.C.; Longo, M.; Roscia, M.; Pagano, M. Comparative analysis of fixed and sun tracking low power PV systems considering energy consumption. Energy Convers. Manag. 2015, 92, 143–148. [Google Scholar] [CrossRef]
- Gilbert, M.M. Renewable and Efficient Electric Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. A review of principle and sun-tracking methods for maximizing solar systems output. Renew. Sustain. Energy Rev. 2009, 13, 1800–1818. [Google Scholar] [CrossRef]
- REE. CO2 Emissions of Electricity Generation in Spain; Technical Report; Red Eléctrica de España: Madrid, Spain, 2021. [Google Scholar]
- Sidek, M.; Azis, N.; Hasan, W.; Ab Kadir, M.; Shafie, S.; Radzi, M. Automated positioning dual-axis solar tracking system with precision elevation and azimuth angle control. Energy 2017, 124, 160–170. [Google Scholar] [CrossRef]
- Abdollahpour, M.; Golzarian, M.R.; Rohani, A.; Zarchi, H.A. Development of a machine vision dual-axis solar tracking system. Sol. Energy 2018, 169, 136–143. [Google Scholar] [CrossRef]
- Konneh, K.V.; Masrur, H.; Othman, M.L.; Wahab, N.I.A.; Hizam, H.; Islam, S.Z.; Crossley, P.; Senjyu, T. Optimal Design and Performance Analysis of a Hybrid Off-Grid Renewable Power System Considering Different Component Scheduling, PV Modules, and Solar Tracking Systems. IEEE Access 2021, 9, 64393–64413. [Google Scholar] [CrossRef]
- Sneineh, A.A.; Salah, W.A. Design and implementation of an automatically aligned solar tracking system. Int. J. Power Electron. Drive Syst. 2019, 10, 2055. [Google Scholar] [CrossRef]
- Prinsloo, G.; Dobson, R.; Schreve, K. Carbon footprint optimization as PLC control strategy in solar power system automation. Energy Procedia 2014, 49, 2180–2190. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Model | |||||
|---|---|---|---|---|---|---|
| A 1B 6-N24018 | 18 | 18 | 0.82 | 4.77 | 0.0205 | |
| A 1B 6-N32020A | 20 | 20 | 0.80 | 4.08 | 0.0221 | |
| A 1B 6-N32024 | 24 | 24 | 0.77 | 4.08 | 0.0253 | |
| A 1B 6-N24030 | 30 | 30 | 0.75 | 4.77 | 0.0301 | |
| A 1B 6-N24036 | 36 | 36 | 0.72 | 4.77 | 0.0376 | |
| A 1B 6-N48040 | 40 | 40 | 0.71 | 3.58 | 0.0443 | |
| S1B83A-C064B096D | 48 | 48 | 0.68 | 3.583 | 0.0587 | |
| S1B83A-C064B100D | 50 | 50 | 0.67 | 3.583 | 0.0623 | |
| S1B83A-C064B110D | 55 | 55 | 0.65 | 3.583 | 0.0719 | |
| S1B83A-C064B120D | 60 | 60 | 0.63 | 3.583 | 0.0825 | |
| S1B83A-C064B130D | 65 | 65 | 0.61 | 3.583 | 0.0941 | |
| S1B83A-C048B070S | 70 | 70 | 0.59 | 3.583 | 0.0573 | |
| S1B83A-C048B072S | 72 | 72 | 0.58 | 3.583 | 0.0598 | |
| S1B83A-C048B080S | 80 | 80 | 0.55 | 3.583 | 0.0704 | |
| S1B83A-C048B090S | 90 | 90 | 0.50 | 3.583 | 0.0854 |
| ID | Model | [rpm] | [W] | [Nm] |
|---|---|---|---|---|
| 1271-12-392 | 5 | 0.54 | 0.2 | |
| 1308-12-75 | 28 | 2.76 | 0.3 | |
| 1308-12-100 | 20 | 2.88 | 0.4 | |
| 3256-0 | 46 | 3.12 | 0.5 | |
| BS138-4/12-608 | 5.3 | 0.90 | 0.5 | |
| 82862201 | 14 | 3.90 | 0.5 | |
| 82712006 | 35 | 1.44 | 0.5 | |
| MR04A | 15 | 0.96 | 0.6 | |
| 1308-12-200 | 10 | 3.00 | 0.8 | |
| 638178 | 30 | 6.00 | 0.9 | |
| 1308-12-250 | 8.5 | 2.88 | 1.0 | |
| 1308-12-510 | 5 | 1.80 | 1.0 | |
| 1308-12-630 | 4.5 | 1.56 | 1.0 | |
| MR08B-012004 | 30 | 4.84 | 1.2 | |
| 638174 | 20 | 6.00 | 1.3 | |
| PS-150-12-625 | 8.5 | 6.36 | 2.5 | |
| E192-12-458 | 8.5 | 6.48 | 3.0 | |
| E192-12-625 | 6 | 5.52 | 3.0 | |
| 114-41226-768 | 3.6 | 3.60 | 3.5 | |
| 638166 | 6 | 6.00 | 4.3 |
| Rank | [W] | [m] | |||
|---|---|---|---|---|---|
| 1 | 116 | 0.96 | 0.384 | ||
| 2 | 117 | 0.96 | 0.384 | ||
| 3 | 118 | 0.96 | 0.384 | ||
| 4 | 119 | 0.96 | 0.384 | ||
| 5 | 120 | 0.96 | 0.384 | ||
| 6 | 185 | 1.56 | 0.624 | ||
| 7 | 186 | 1.56 | 0.624 | ||
| 8 | 187 | 1.56 | 0.624 | ||
| 9 | 188 | 1.56 | 0.624 | ||
| 10 | 189 | 1.56 | 0.624 |
| Rank | [Nm] | [MPa] | [m] | [m] | [m] | [m] | |
|---|---|---|---|---|---|---|---|
| 1 | 116 | 23.79 | 2.7338 | 0.0253 | 0.0494 | 0.0202 | 0.0297 |
| 2 | 117 | 24.78 | 4.5280 | 0.0391 | 0.0430 | 0.0322 | 0.0381 |
| 3 | 118 | 25.05 | 4.7088 | 0.0382 | 0.0392 | 0.0296 | 0.0338 |
| 4 | 119 | 26.40 | 3.5514 | 0.0391 | 0.0486 | 0.0333 | 0.0425 |
| 5 | 120 | 27.00 | 2.9715 | 0.0328 | 0.0464 | 0.0275 | 0.0340 |
| 6 | 185 | 25.92 | 1.8779 | 0.0266 | 0.0556 | 0.0249 | 0.0256 |
| 7 | 186 | 28.40 | 3.7828 | 0.0339 | 0.0392 | 0.0261 | 0.0283 |
| 8 | 187 | 32.64 | 3.7041 | 0.0317 | 0.0416 | 0.0253 | 0.0304 |
| 9 | 188 | 33.50 | 14.1287 | 0.0239 | 0.0321 | 0.0230 | 0.0274 |
| 10 | 189 | 35.75 | 10.4611 | 0.0344 | 0.0350 | 0.0264 | 0.0337 |
| Variable | Units | Simulation | Experimental |
|---|---|---|---|
| Wh | |||
| Wh | |||
| Wh |
| Variable | Units | Simulation | Experimental |
|---|---|---|---|
| 0.06 | 0.062 | ||
| 0.06 | 0.071 | ||
| Parameter | STS | STS | |||
|---|---|---|---|---|---|
| Accuracy (Passive) [] | < | < | - | - | < |
| Accuracy (Active) [] | < | < | < | < | - |
| Angle resolution [] | - | - | |||
| Gear-train | Worm-gear | Worm-gear | Harmonic | Harmonic | Worm-Gear |
| DC Motor type | Stepper | Stepper | Stepper | Stepper | Permanent |
| Torque [Nm] | 35 | 12 | 12 | 24 | 24 |
| Angular velocity [] | - | - | |||
| Payload capacity [kg] | 30 | 10 | 7 | 15 | 32 |
| Power consumption [W] | < | < | <10 | <10 | < |
| Elevation angle [deg] | - | - | to | to | to |
| Azimuthal angle [deg] | - | - | to | to | to |
| Weight [kg] | 25 | 8 | |||
| Width [m] | |||||
| Length [m] | |||||
| Height [m] |
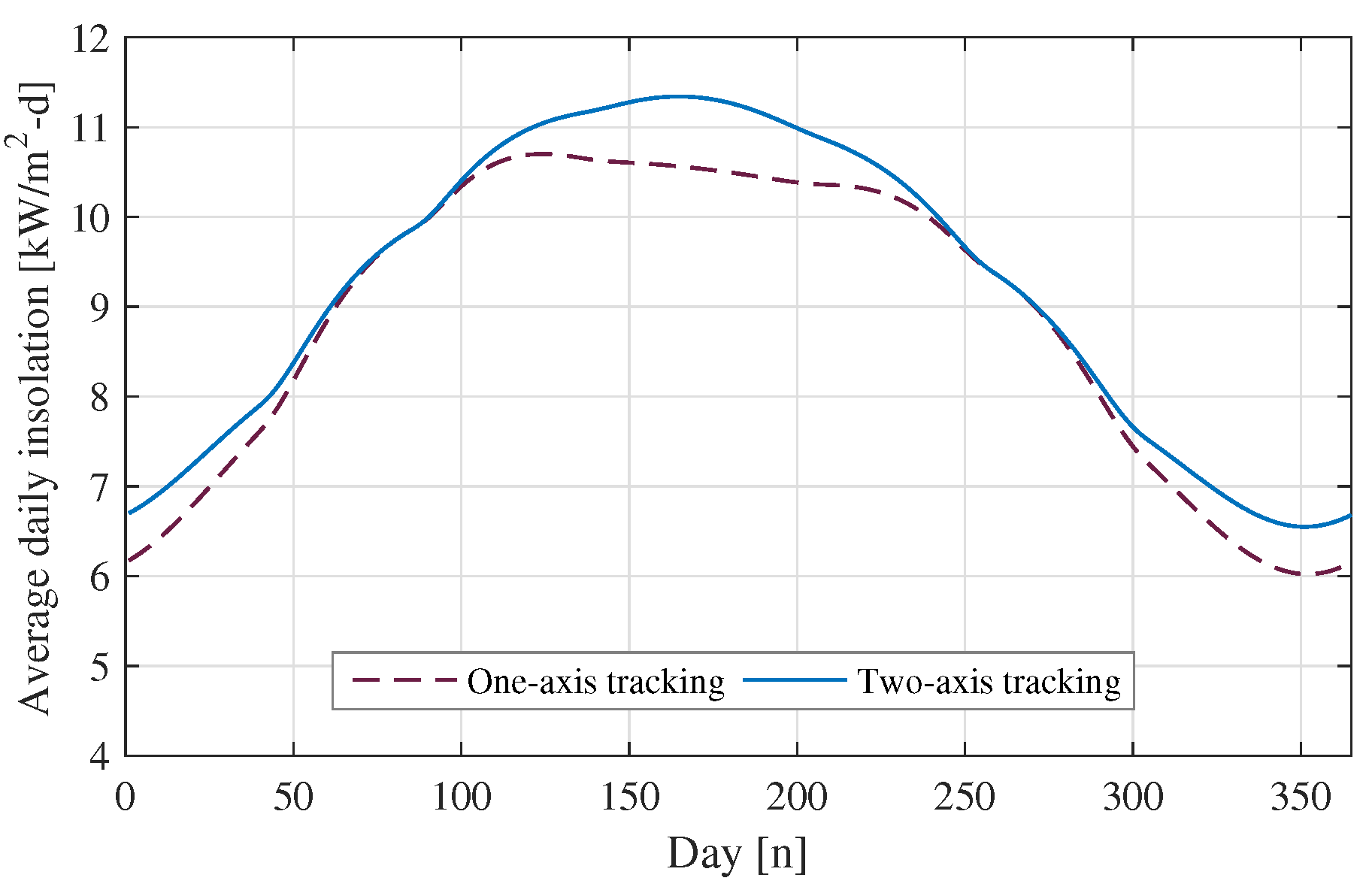
| Month Insolation [kW/m-m] | |||
|---|---|---|---|
| Month | One-Axis | Two-Axis | |
| Jan | 206.4580 | 220.8760 | |
| Feb | 222.7389 | 229.3483 | |
| Mar | 294.8224 | 295.7353 | |
| Apr | 313.3043 | 317.0220 | |
| May | 330.3101 | 345.7804 | |
| Jun | 316.5966 | 339.5153 | |
| July | 322.6228 | 342.0917 | |
| Aug | 315.9140 | 323.5156 | |
| Sept | 281.5187 | 282.0640 | |
| Oct | 250.1583 | 254.1680 | |
| Nov | 201.8106 | 213.2003 | |
| Dec | 188.6862 | 204.7313 | |
| Total [MW/m-yr] | |||
| Insolation [W/m] | |||
|---|---|---|---|
| Solar Time | One-Axis | Two-Axis | Te [°C] |
| 07:00:00 | 75.1743 | 82.8279 | 17.7 |
| 08:00:00 | 497.0860 | 542.7491 | 18.9 |
| 09:00:00 | 706.3422 | 764.7833 | 21.5 |
| 10:00:00 | 816.1720 | 877.8104 | 24.6 |
| 11:00:00 | 877.0715 | 939.2781 | 26.3 |
| 12:00:00 | 909.4624 | 972.3091 | 27.7 |
| 13:00:00 | 924.1609 | 988.2975 | 29.3 |
| 14:00:00 | 928.0463 | 993.0215 | 30.7 |
| 15:00:00 | 924.1609 | 988.2975 | 32.0 |
| 16:00:00 | 909.4624 | 972.3091 | 32.7 |
| 17:00:00 | 877.0715 | 939.2781 | 33.1 |
| 18:00:00 | 816.1720 | 877.8104 | 32.0 |
| 19:00:00 | 706.3422 | 764.7833 | 31.4 |
| 20:00:00 | 497.0860 | 542.7491 | 32.5 |
| 21:00:00 | 75.17430 | 82.82795 | 31.8 |
| Total [kW/m-d] | |||
| Model | [] | Type | ||
|---|---|---|---|---|
| 0.174 | 2.4 | 0.114 | Monocrystalline | |
| 0.157 | 3.0 | 0.158 | Polycrystalline | |
| 0.243 | 2.82 | 0.123 | Monocrystalline | |
| 0.240 | 3.1 | 0.124 | Monocrystalline | |
| 0.284 | 3.4 | 0.105 | Polycrystalline | |
| 0.340 | 4.5 | 0.146 | Monocrystalline | |
| 0.397 | 4.58 | 0.125 | Monocrystalline | |
| 0.515 | 6.74 | 0.155 | Monocrystalline | |
| 0.359 | 7.25 | 0.222 | Monocrystalline | |
| 0.697 | 7.26 | 0.143 | Polycrystalline | |
| 0.646 | 7.48 | 0.154 | Monocrystalline | |
| 0.665 | 9.0 | 0.150 | Monocrystalline | |
| 0.807 | 9.2 | 0.161 | Monocrystalline | |
| 0.994 | 12.0 | 0.150 | Monocrystalline |
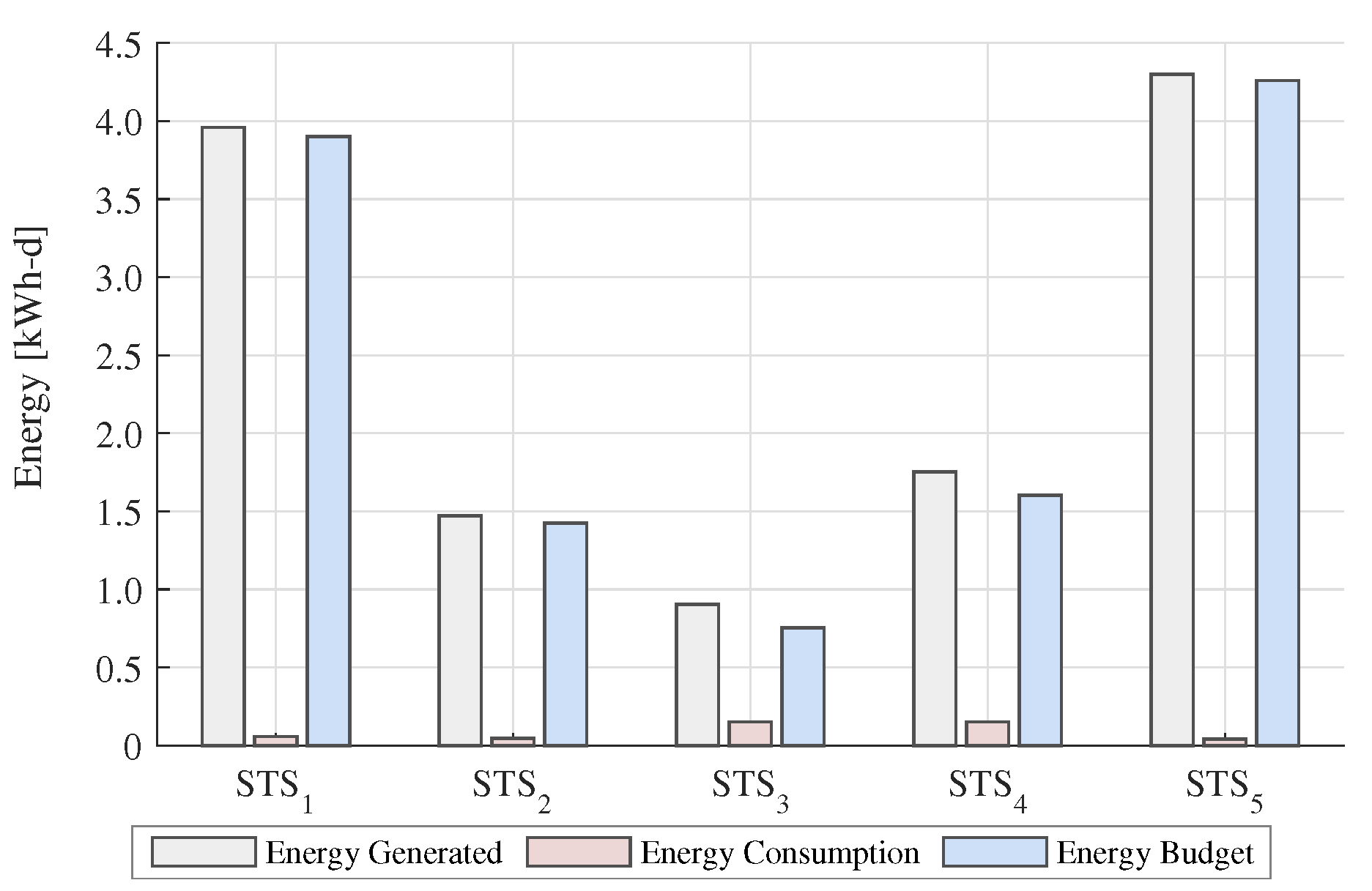
| Panels | EG | EC | EB | EC | CO | |||
|---|---|---|---|---|---|---|---|---|
| STS | Array | [m] | [kg] | [kWh-d] | [Wh-d] | [kWh-d] | [g] | |
| STS | 2.3853 | 28.58 | 3.9600 | 59.0916 | 3.9009 | 1.4921 | 36.6368 | |
| STS | 0.8074 | 9.20 | 1.4709 | 45.5246 | 1.4253 | 3.0950 | 28.2253 | |
| STS | 0.5159 | 6.74 | 0.9053 | 150.7440 | 0.7546 | 16.6496 | 93.4612 | |
| STS | 1.1515 | 15.00 | 1.7537 | 150.7440 | 1.6029 | 8.5955 | 93.4612 | |
| STS | 2.6850 | 31.26 | 4.2998 | 41.4546 | 4.2583 | 0.9641 | 25.7018 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Flores-Hernández, D.A.; Luviano-Juárez, A.; Lozada-Castillo, N.; Gutiérrez-Frías, O.; Domínguez, C.; Antón, I. Optimal Strategy for the Improvement of the Overall Performance of Dual-Axis Solar Tracking Systems. Energies 2021, 14, 7795. https://doi.org/10.3390/en14227795
Flores-Hernández DA, Luviano-Juárez A, Lozada-Castillo N, Gutiérrez-Frías O, Domínguez C, Antón I. Optimal Strategy for the Improvement of the Overall Performance of Dual-Axis Solar Tracking Systems. Energies. 2021; 14(22):7795. https://doi.org/10.3390/en14227795
Chicago/Turabian StyleFlores-Hernández, Diego A., Alberto Luviano-Juárez, Norma Lozada-Castillo, Octavio Gutiérrez-Frías, César Domínguez, and Ignacio Antón. 2021. "Optimal Strategy for the Improvement of the Overall Performance of Dual-Axis Solar Tracking Systems" Energies 14, no. 22: 7795. https://doi.org/10.3390/en14227795