Coordination of Multiple Electric Vehicle Aggregators for Peak Shaving and Valley Filling in Distribution Feeders

 , , , ,
, , , ,
Abstract
:1. Introduction
- Development of an on-line multi EV aggregator coordination scheme which is better suited to administer the incoming/outgoing EVs at smaller intervals. The proposed scheme is rigorous in its approach as it integrates the key objectives of aggregator coordination, load leveling and EV mobility to function in a compatible manner.
- Since the scheme is developed for low power level residential chargers, the power allocation to EVs is constant based on the charger’s rated power. Hence, the variable power allocation complexity is averted.
2. EV Architecture
3. Peak Shaving and Valley Filling Scheme for Aggregators
3.1. Calculation of Power Deviation
3.2. Power Allocation to EV Aggregators
3.3. Power Allocation to EVs under Each Aggregator
3.3.1. Objective Function
3.3.2. Constraints
- During the charging/discharging operation, the battery energy of an EV is maintained to be within the minimum battery capacity and . The minimum battery capacity constraint prevents the over-discharging of the EV and it also makes the EV capable for emergency travel. The minimum battery capacity refers to the amount of energy required to travel a specific distance and is the corresponding minimum percentage SoC. This specific distance in this study corresponds to the average daily mileage for private cars in South Korea.
- The whole V2G/G2V operation of an EV is constrained within its arrival time and expected departure time represented by:
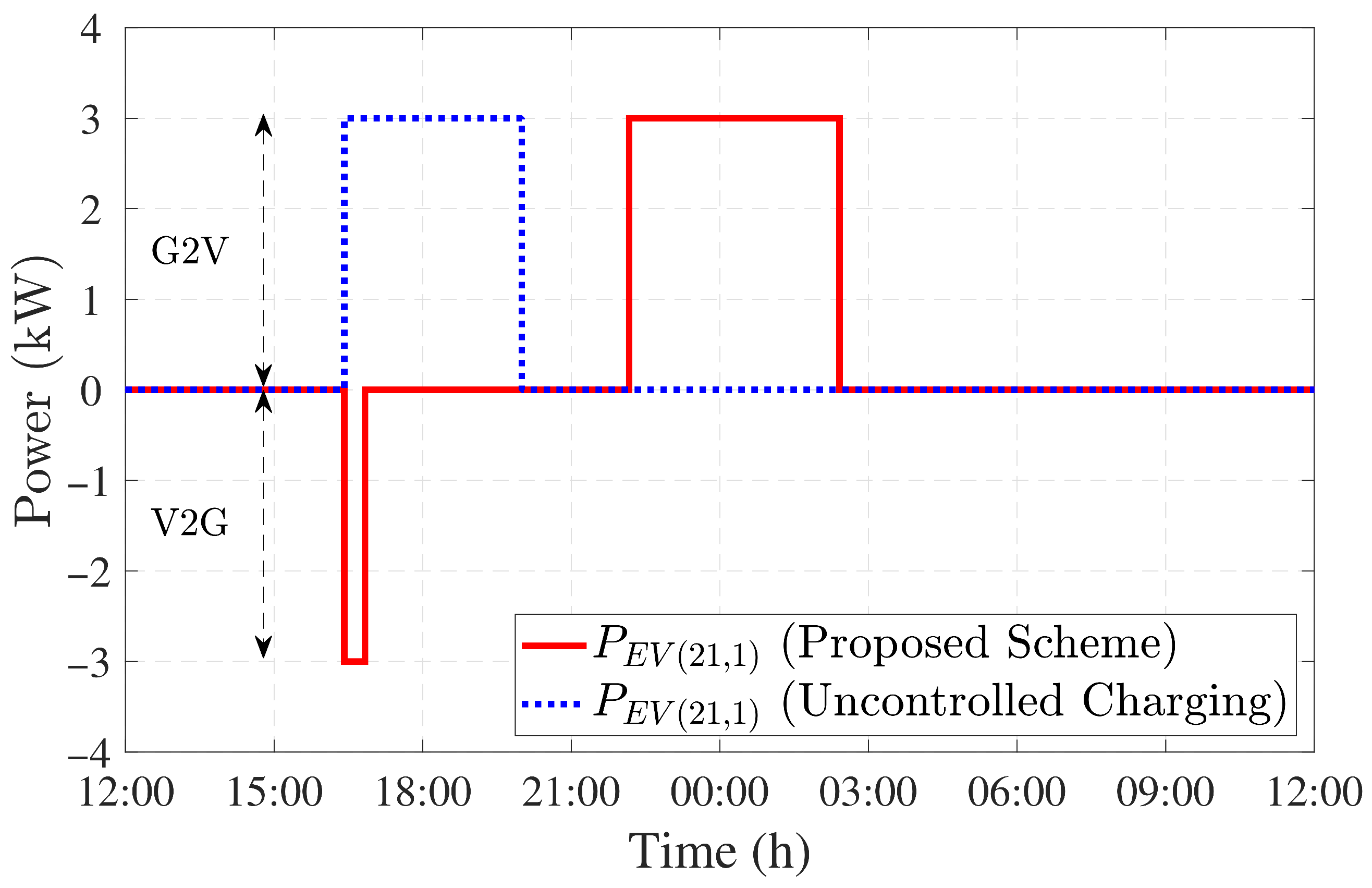
- When an EV is connected to the system according to Equation (11), the EV charging/discharging power based on the charger rating is:
- The last constraint ensures that the total power provided or absorbed by all EVs within an aggregator does not exceed the allocated power of the aggregator by DSO.
3.4. Control Process
4. Simulation Cases
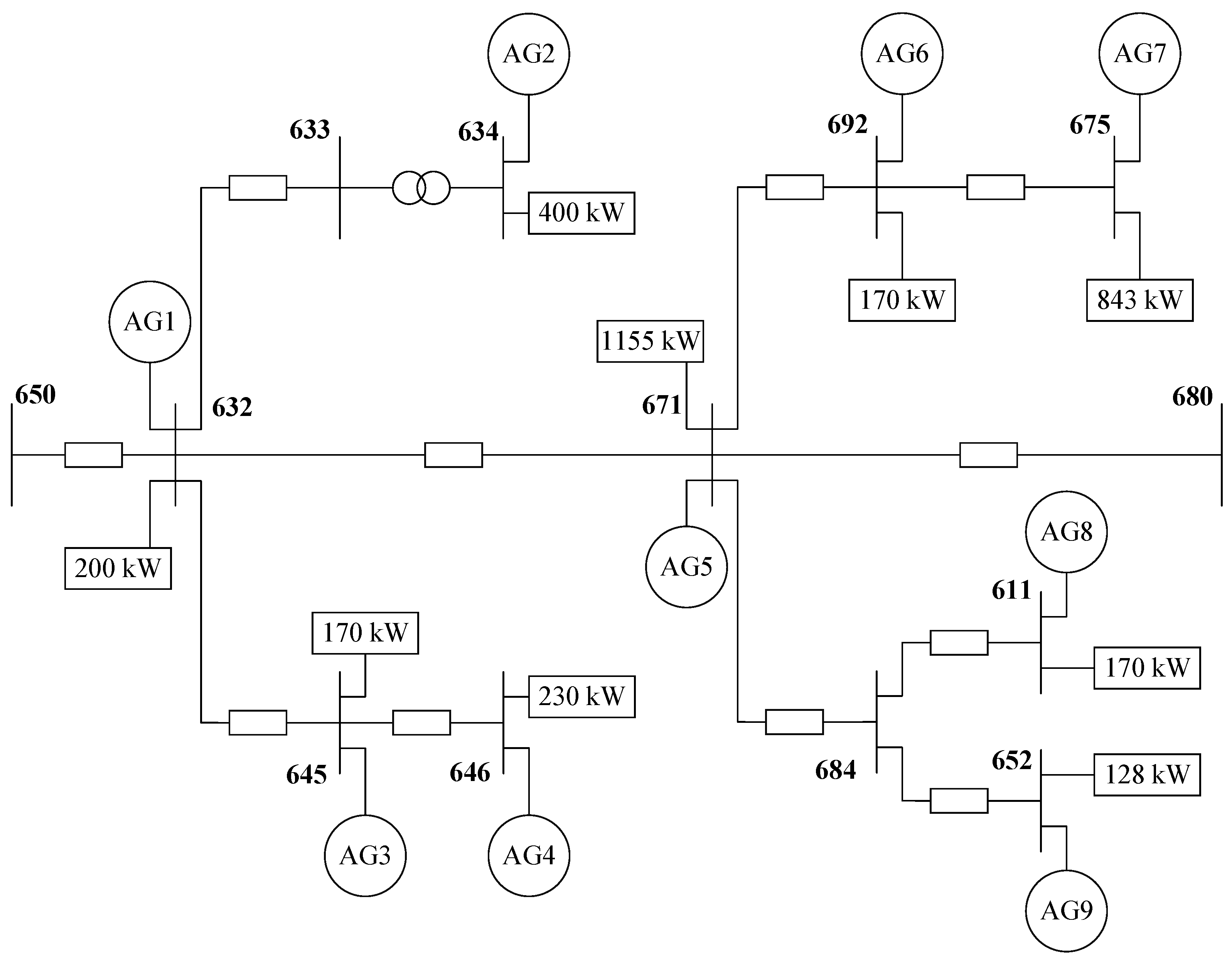
4.1. IEEE 13-Node Distribution Feeder
EV Fleet
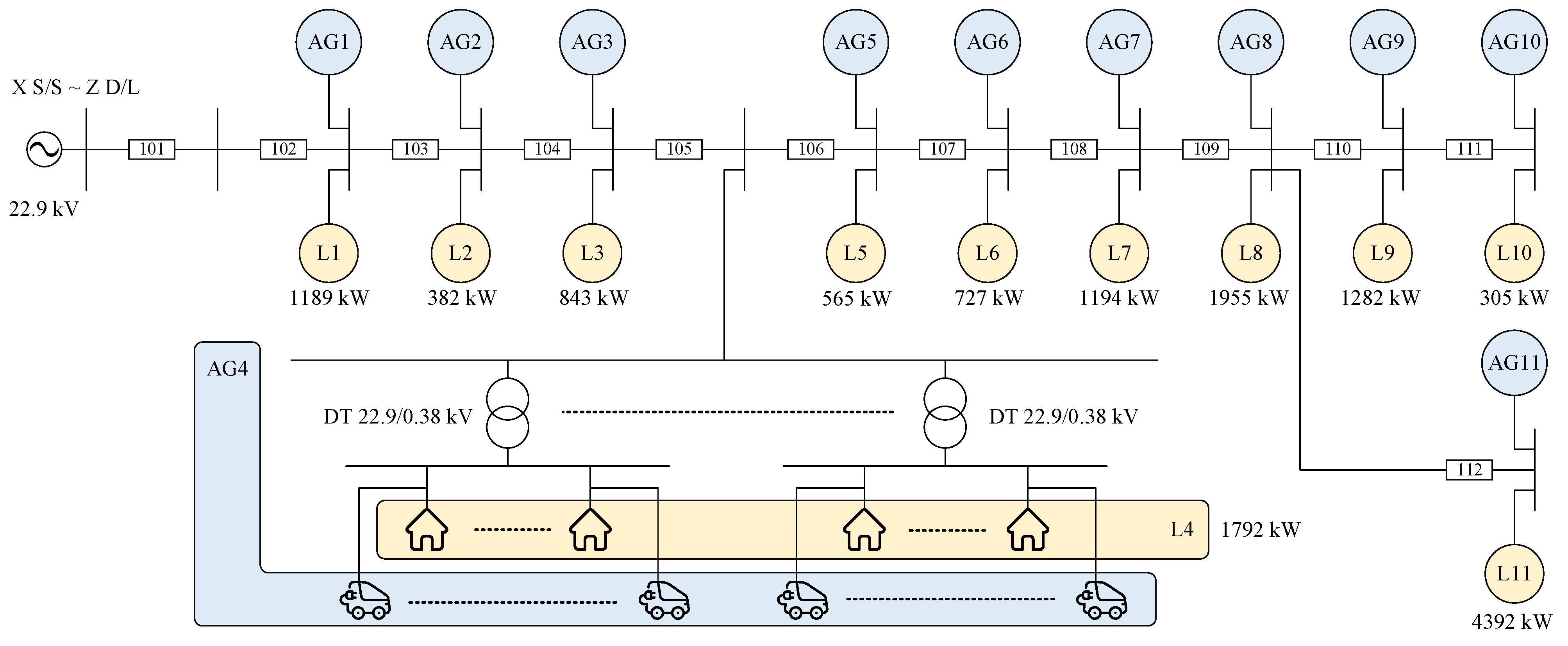
4.2. KEPCO X S/S-Z D/L Feeder
EV Fleet
4.3. Performance Measuring Indices
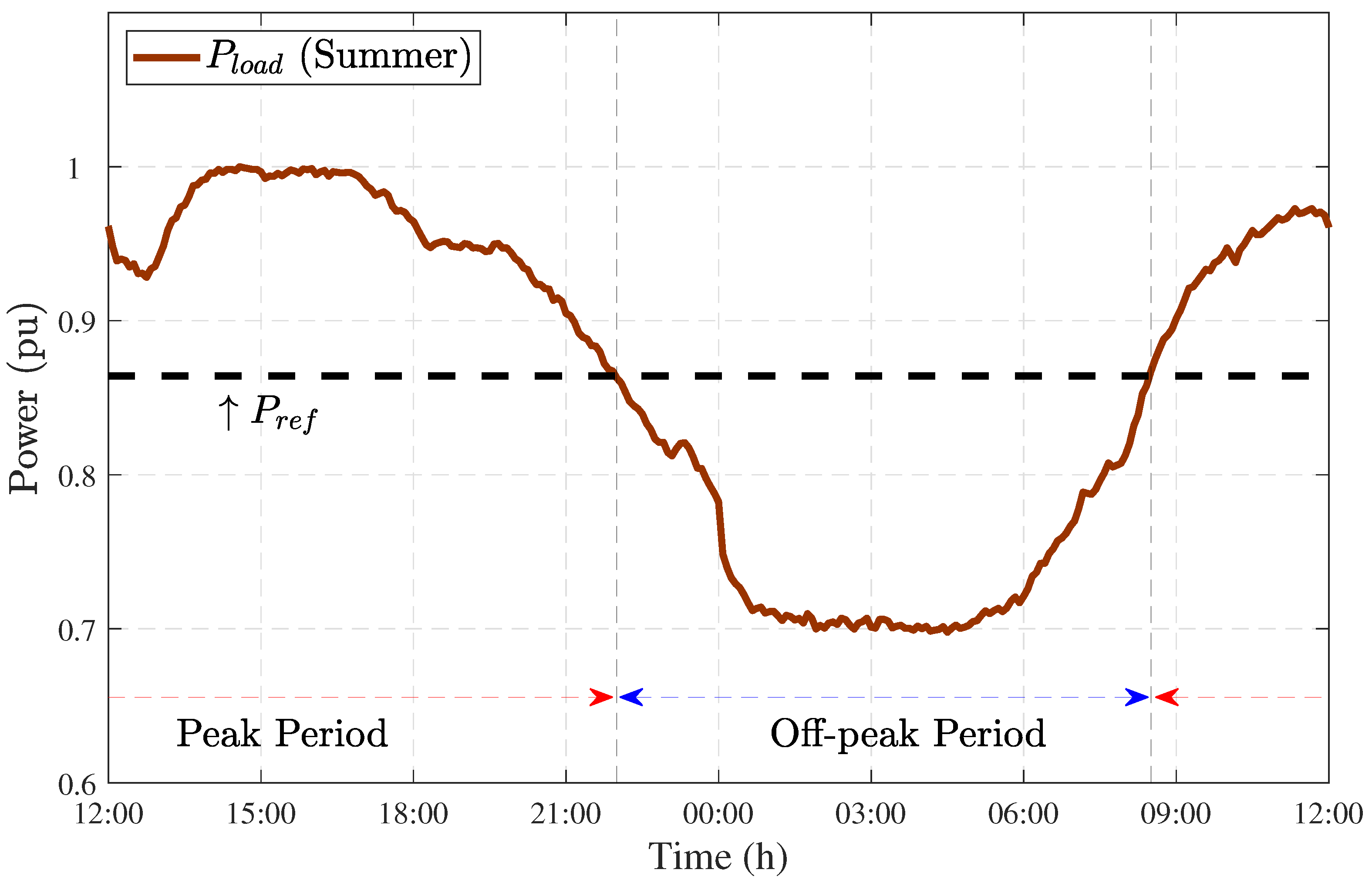
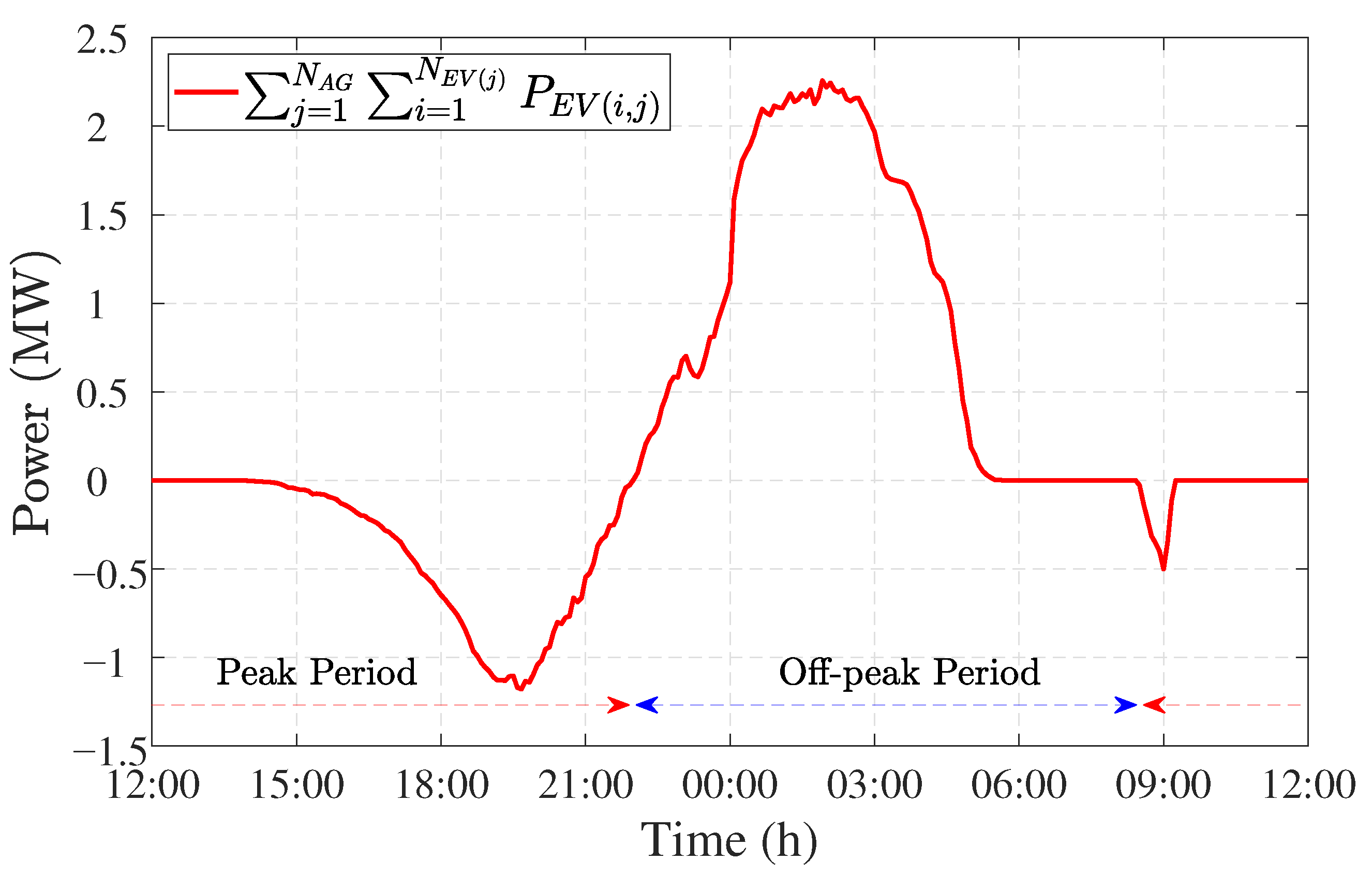
- Peak shaving index gives the ratio of the total energy shaved to the total energy expected to be shaved by the EVs in the feeder during peak period:where and are the starting and ending time of the peak period.
- Valley filling index indicates the ratio of the total energy absorbed to the overall energy anticipated to be absorbed by the EVs in the feeder during off-peak period:where and are the starting and ending time of the off-peak valley period.
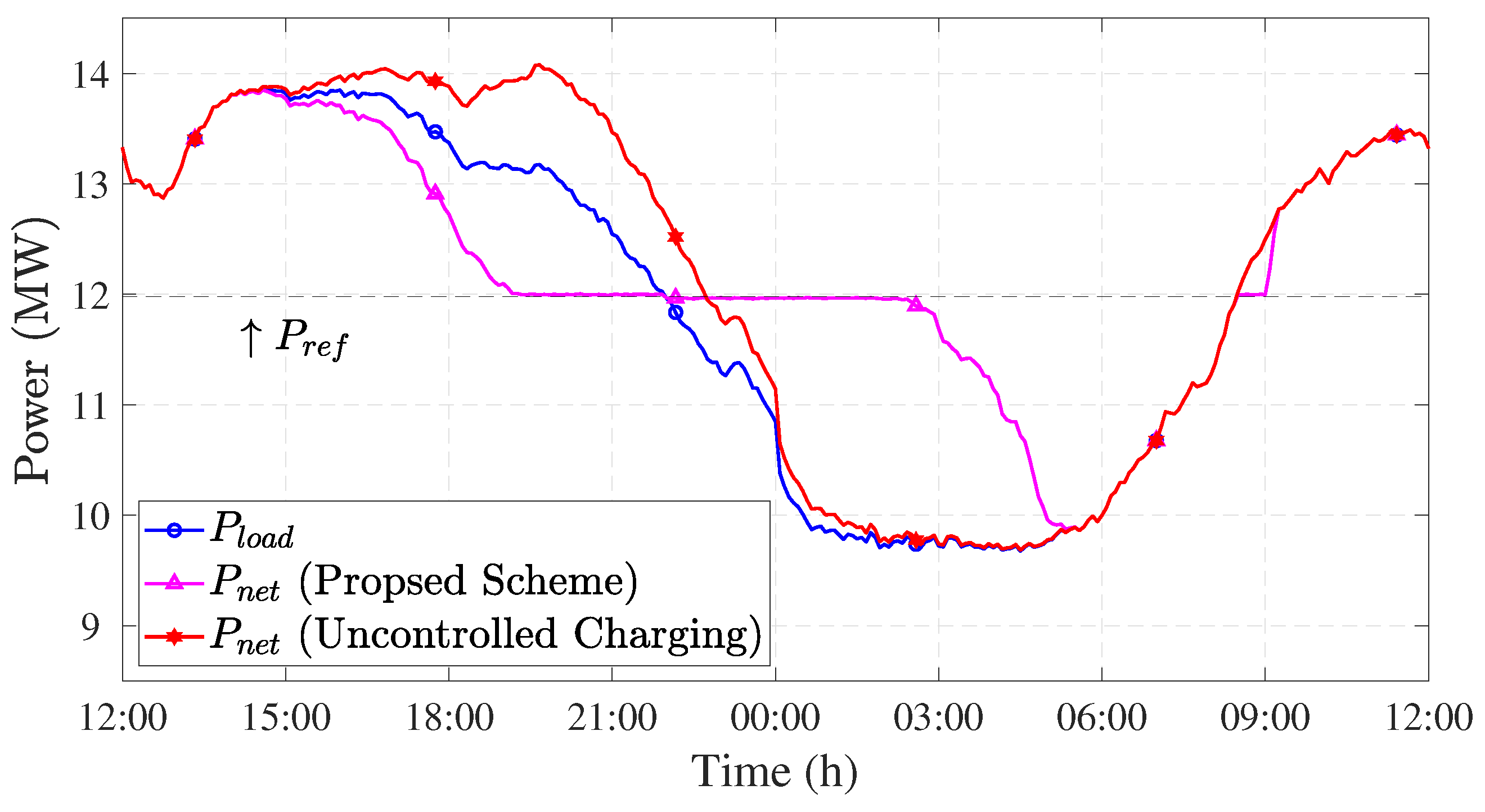
- The load factor of the feeder is given by:where is the maximum value of net load profile while is given as:
- The variance of load is calculated as:
5. Results
5.1. Implementation of Proposed Scheme on IEEE 13-Node Distribution Feeder
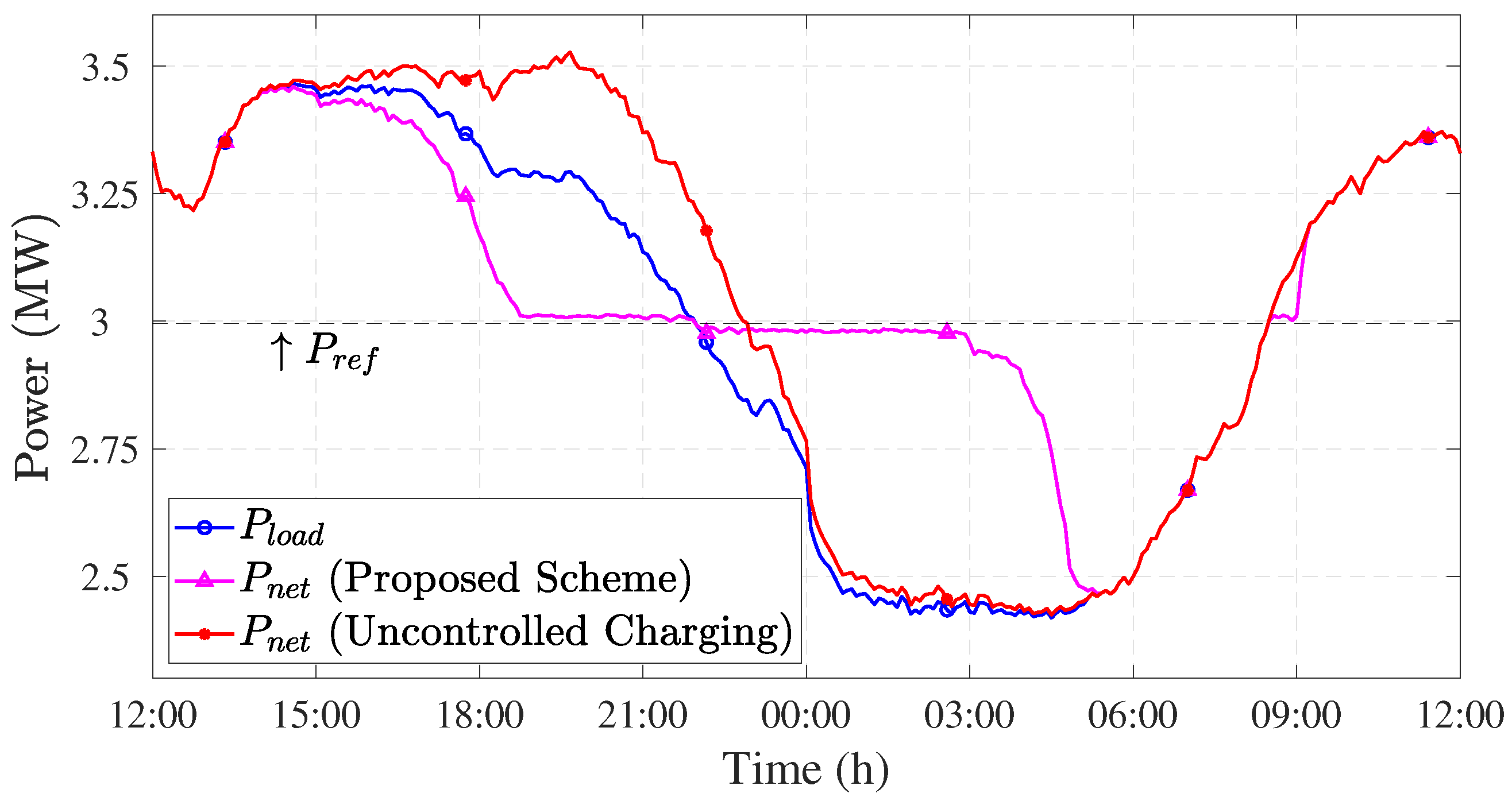
5.2. Implementation of Proposed Scheme on KEPCO X S/S-Z D/L Feeder
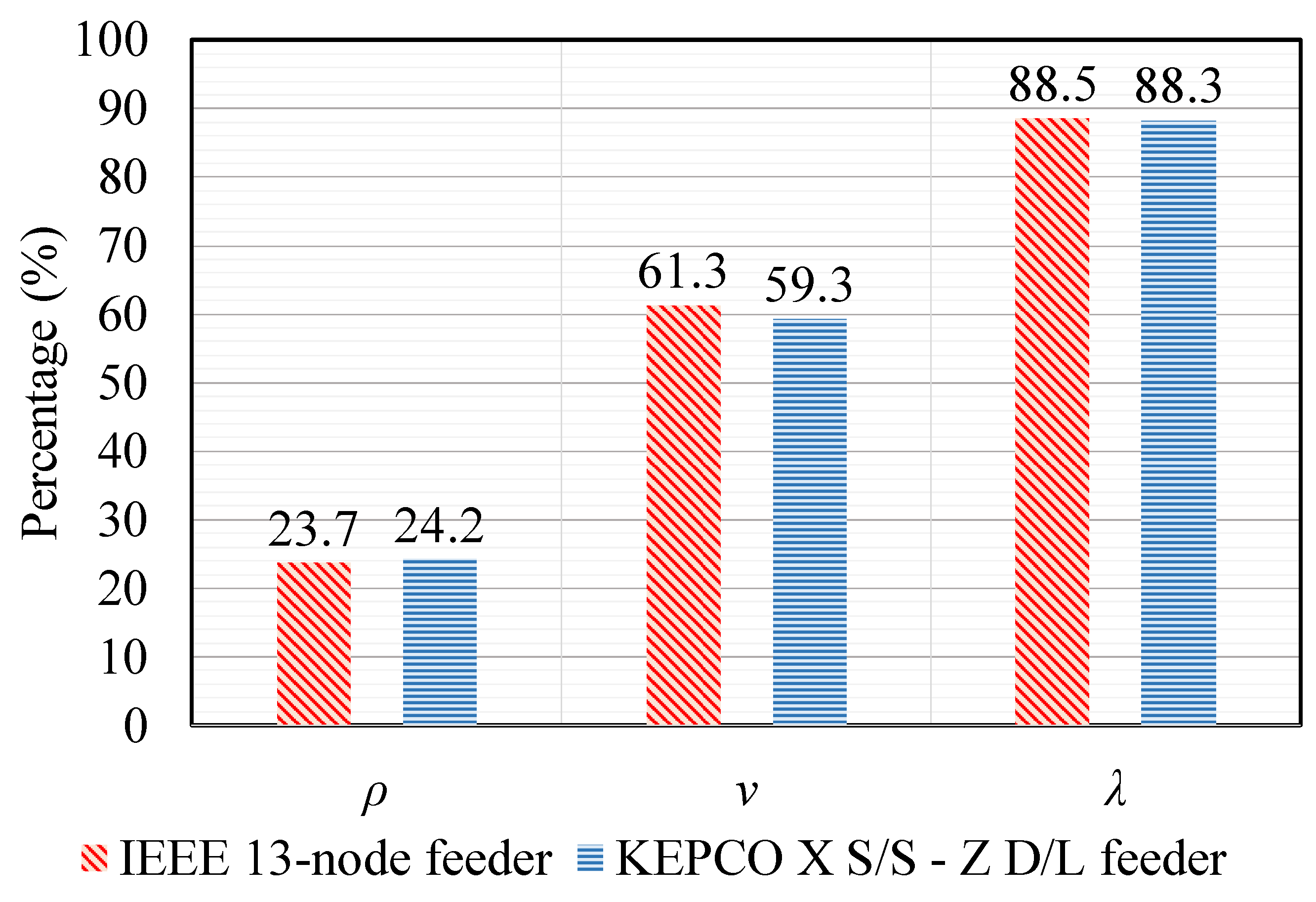
5.3. Comparison of Proposed Scheme on Various Feeders
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mehmood, K.K.; Kim, C.; Khan, S.U.; Haider, Z.M. Unified Planning of Wind Generators and Switched Capacitor Banks: A Multiagent Clustering-Based Distributed Approach. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- Shareef, H.; Islam, M.M.; Mohamed, A. A review of the stage-of-the-art charging technologies, placement methodologies, and impacts of electric vehicles. Renew. Sustain. Energy Rev. 2016, 64, 403–420. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Kaur, K.; Rana, R.; Kumar, N.; Singh, M.; Mishra, S. A Colored Petri Net Based Frequency Support Scheme Using Fleet of Electric Vehicles in Smart Grid Environment. IEEE Trans. Power Syst. 2016, 31, 4638–4649. [Google Scholar] [CrossRef]
- Jia, H.; Li, X.; Mu, Y.; Xu, C.; Jiang, Y.; Yu, X.; Wu, J.; Dong, C. Coordinated control for EV aggregators and power plants in frequency regulation considering time-varying delays. Appl. Energy 2018, 210, 1363–1376. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Integrated operation of electric vehicles and renewable generation in a smart distribution system. Energy Convers. Manag. 2015, 89, 99–110. [Google Scholar] [CrossRef]
- Nguyen, H.N.T.; Zhang, C.; Zhang, J.; Le, L.B. Hierarchical control for electric vehicles in smart grid with renewables. In Proceedings of the 13th IEEE International Conference on Control Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 898–903. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, Z.; Song, Y.; Zhao, W.; Zhang, Y. Coordination of PEVs charging across multiple aggregators. Appl. Energy 2014, 136, 582–589. [Google Scholar] [CrossRef]
- Xia, M.; Lai, Q.; Zhong, Y.; Li, C.; Chiang, H.D. Aggregator-Based Interactive Charging Management System for Electric Vehicle Charging. Energies 2016, 9, 159. [Google Scholar] [CrossRef] [Green Version]
- Mou, Y.; Xing, H.; Lin, Z.; Fu, M. Decentralized Optimal Demand-Side Management for PHEV Charging in a Smart Grid. IEEE Trans. Smart Grid 2015, 6, 726–736. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, S. Grid Power Peak Shaving and Valley Filling Using Vehicle-to-Grid Systems. IEEE Trans. Power Deliv. 2013, 28, 1822–1829. [Google Scholar] [CrossRef]
- Erdogan, N.; Erden, F.; Kisacikoglu, M. A fast and efficient coordinated vehicle-to-grid discharging control scheme for peak shaving in power distribution system. J. Mod. Power Syst. Clean Energy 2018, 6, 555–566. [Google Scholar] [CrossRef] [Green Version]
- Pillai, J.R.; Bak-Jensen, B. Integration of Vehicle-to-Grid in the Western Danish Power System. IEEE Trans. Sustain. Energy 2011, 2, 12–19. [Google Scholar] [CrossRef]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. Effective Utilization of Available PEV Battery Capacity for Mitigation of Solar PV Impact and Grid Support With Integrated V2G Functionality. IEEE Trans. Smart Grid 2016, 7, 1562–1571. [Google Scholar] [CrossRef] [Green Version]
- Khan, S.U.; Mehmood, K.K.; Haider, Z.M.; Rafique, M.K.; Kim, C.H. A Bi-Level EV Aggregator Coordination Scheme for Load Variance Minimization with Renewable Energy Penetration Adaptability. Energies 2018, 11, 2809. [Google Scholar] [CrossRef] [Green Version]
- Devidas, A.R.; Ramesh, M.V.; Rangan, V.P. High performance communication architecture for smart distribution power grid in developing nations. Wirel. Netw. 2018, 24, 1621–1638. [Google Scholar] [CrossRef]
- You, S.; Hu, J.; Ziras, C. An Overview of Modeling Approaches Applied to Aggregation-Based Fleet Management and Integration of Plug-in Electric Vehicles. Energies 2016, 9, 968. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.J.; Kim, J.H.; Kim, C.H.; Kim, S.K.; Kim, E.S.; Kim, D.U.; Mehmood, K.K.; Khan, S.U. Coordinated Control Algorithm for Distributed Battery Energy Storage Systems for Mitigating Voltage and Frequency Deviations. IEEE Trans. Smart Grid 2016, 7, 1713–1722. [Google Scholar] [CrossRef]
- Kersting, W.H. Radial distribution test feeders. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting (Cat. No.01CH37194), Columbus, OH, USA, 28 January–1 February 2001; Volume 2, pp. 908–912. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, J.H.; Kim, D.U.; Go, H.S.; Kim, C.H.; Kim, E.S.; Kim, S.K. Evaluation of voltage sag and unbalance due to the system connection of electric vehicles on distribution system. J. Electr. Eng. Technol. 2014, 9, 452–460. [Google Scholar] [CrossRef] [Green Version]
- Park, K.; Seo, H.; Kim, C.; Jung, C.; Yoo, Y.; Lim, Y. Analysis of the Neutral Current for Two-Step-Type Poles in Distribution Lines. IEEE Trans. Power Deliv. 2009, 24, 1483–1489. [Google Scholar] [CrossRef]
- Kim, J.H.; Kim, C.H. Smart EVs Charging Scheme for Load Leveling Considering ToU Price and Actual Data. J. Electr. Eng. Technol. 2017, 12, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Arias, M.B.; Bae, S. Electric vehicle charging demand forecasting model based on big data technologies. Appl. Energy 2016, 183, 327–339. [Google Scholar] [CrossRef]
- Mahmud, K.; Hossain, M.J.; Ravishankar, J. Peak-Load Management in Commercial Systems With Electric Vehicles. IEEE Syst. J. 2018. [Google Scholar] [CrossRef]
- He, P.; Li, M.; Zhao, L.; Venkatesh, B.; Li, H. Water-Filling Exact Solutions for Load Balancing of Smart Power Grid Systems. IEEE Trans. Smart Grid 2018, 9, 1397–1407. [Google Scholar] [CrossRef]
- Jafari, M.; Gauchia, A.; Zhao, S.; Zhang, K.; Gauchia, L. Electric Vehicle Battery Cycle Aging Evaluation in Real-World Daily Driving and Vehicle-to-Grid Services. IEEE Trans. Transp. Electrif. 2018, 4, 122–134. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Aggregator | Number of EVs |
|---|---|---|
| 632 | AG1 | 13 |
| 634 | AG2 | 26 |
| 645 | AG3 | 11 |
| 646 | AG4 | 15 |
| 671 | AG5 | 74 |
| 692 | AG6 | 11 |
| 675 | AG7 | 54 |
| 611 | AG8 | 11 |
| 652 | AG9 | 8 |
| Total | 223 | |
| Location | Aggregator | Number of EVs |
|---|---|---|
| L1 | AG1 | 77 |
| L2 | AG2 | 25 |
| L3 | AG3 | 54 |
| L4 | AG4 | 116 |
| L5 | AG5 | 36 |
| L6 | AG6 | 47 |
| L7 | AG7 | 77 |
| L8 | AG8 | 77 |
| L9 | AG9 | 83 |
| L10 | AG10 | 20 |
| L11 | AG11 | 284 |
| Total | 896 | |
| Entity | Proposed Scheme | Uncontrolled Charging |
|---|---|---|
| 23.7% | - | |
| 61.32% | 8.91% | |
| 88.47% | 86.57% | |
| 0.07 MW | 0.17 MW |
| Entity | Proposed Scheme | Uncontrolled Charging |
|---|---|---|
| 24.25% | - | |
| 59.3% | 7.95% | |
| 88.28% | 86.67% | |
| 1.13 MW | 2.69 MW |
| Entity | IEEE-13 Feeder | KEPCO Feeder |
|---|---|---|
| Mean | 99.34% | 99.2% |
| SD | 0.73% | 0.93% |
| 0.47 | 0.47 | |
| 0.13 | 0.16 | |
| Median () | 0.46 | 0.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.U.; Mehmood, K.K.; Haider, Z.M.; Rafique, M.K.; Khan, M.O.; Kim, C.-H. Coordination of Multiple Electric Vehicle Aggregators for Peak Shaving and Valley Filling in Distribution Feeders. Energies 2021, 14, 352. https://doi.org/10.3390/en14020352
Khan SU, Mehmood KK, Haider ZM, Rafique MK, Khan MO, Kim C-H. Coordination of Multiple Electric Vehicle Aggregators for Peak Shaving and Valley Filling in Distribution Feeders. Energies. 2021; 14(2):352. https://doi.org/10.3390/en14020352
Chicago/Turabian StyleKhan, Saad Ullah, Khawaja Khalid Mehmood, Zunaib Maqsood Haider, Muhammad Kashif Rafique, Muhammad Omer Khan, and Chul-Hwan Kim. 2021. "Coordination of Multiple Electric Vehicle Aggregators for Peak Shaving and Valley Filling in Distribution Feeders" Energies 14, no. 2: 352. https://doi.org/10.3390/en14020352