
Permanent Magnet Synchronous Motor Driving Mechanical Transmission Fault Detection and Identification: A Model-Based Diagnosis Approach


Abstract
:1. Introduction
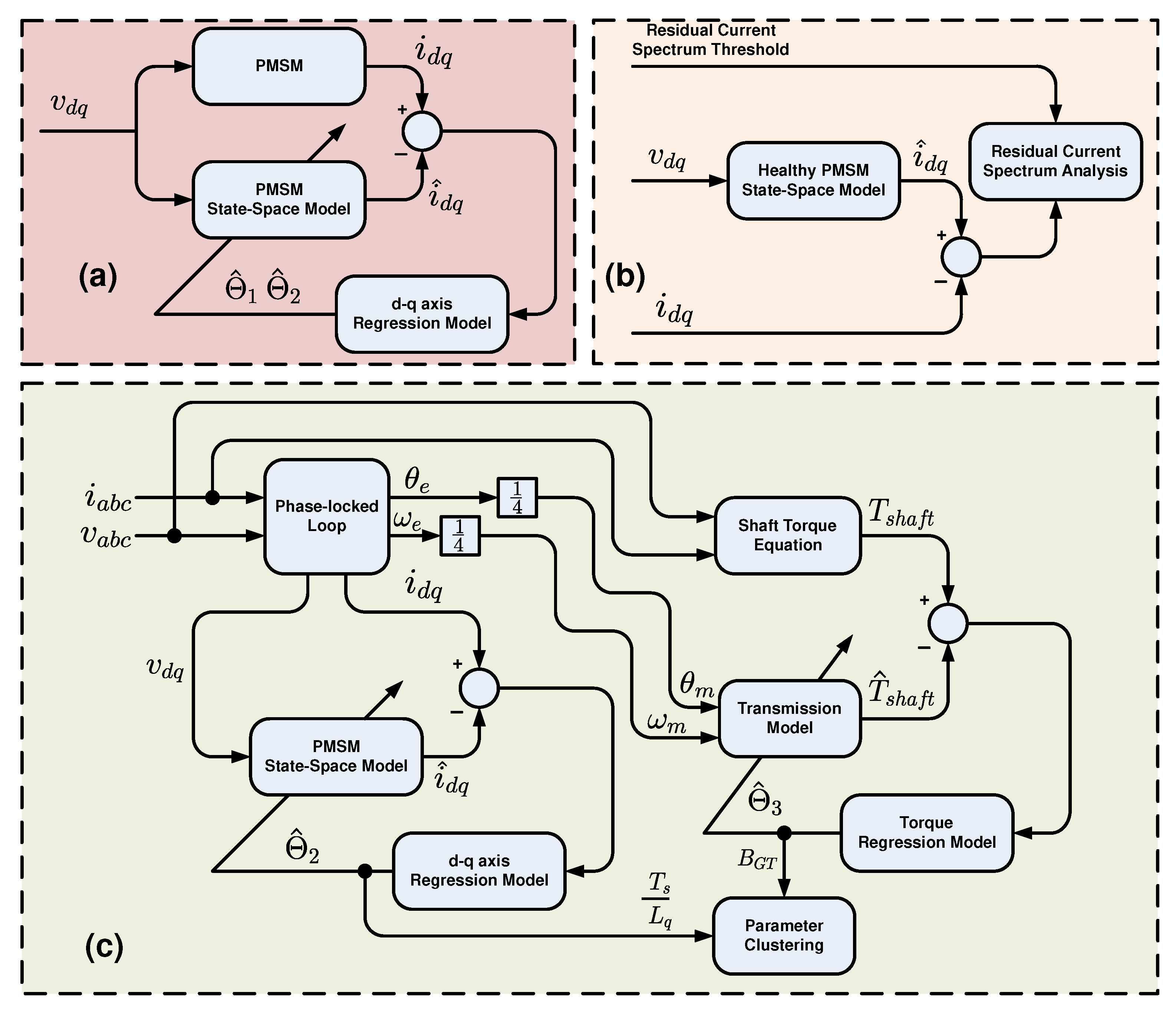
- Few works from the literature discuss the transmission fault in PMSM. This study presents a systematic implementation of a model-based FDI for transmission fault in PMSM. The model-based FDI scheme that utilizes residual current spectrum analysis and parameter clustering is proposed and tested experimentally.
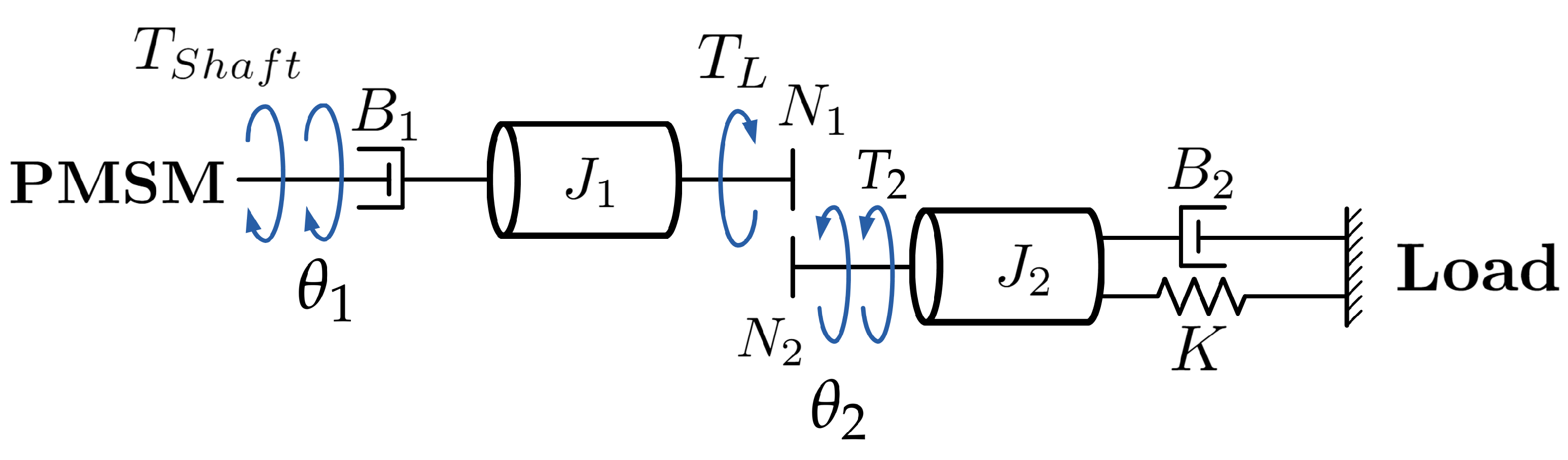
- The transmission is approximated as a simple linear model by using a two-mass-spring damper system, in which the model parameters are estimated using the RLS algorithm.
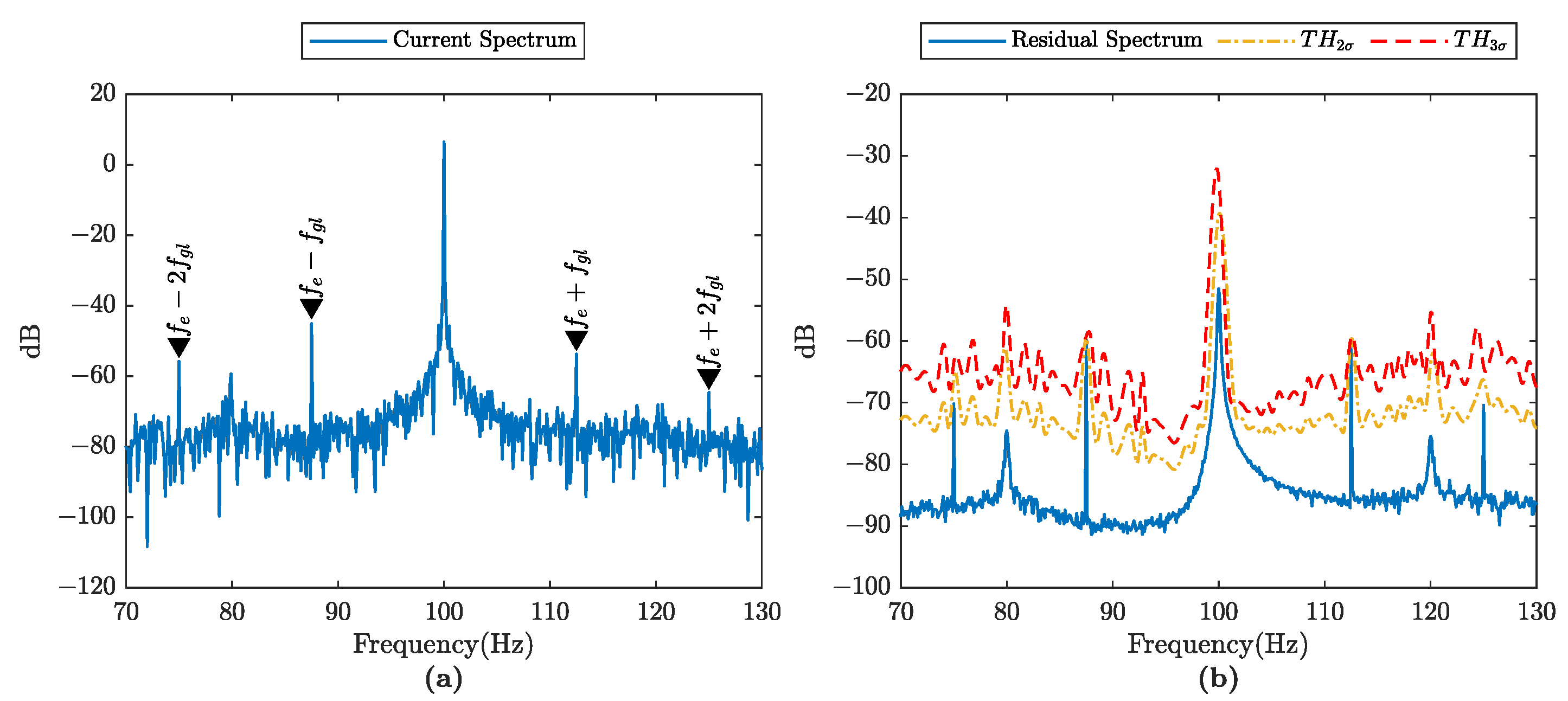
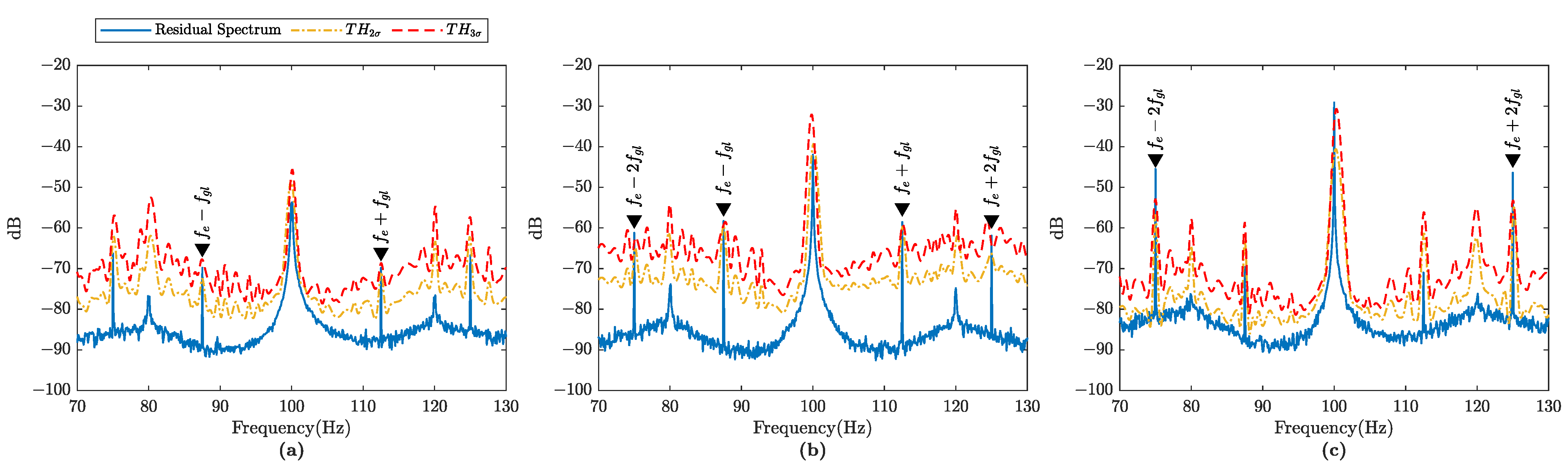
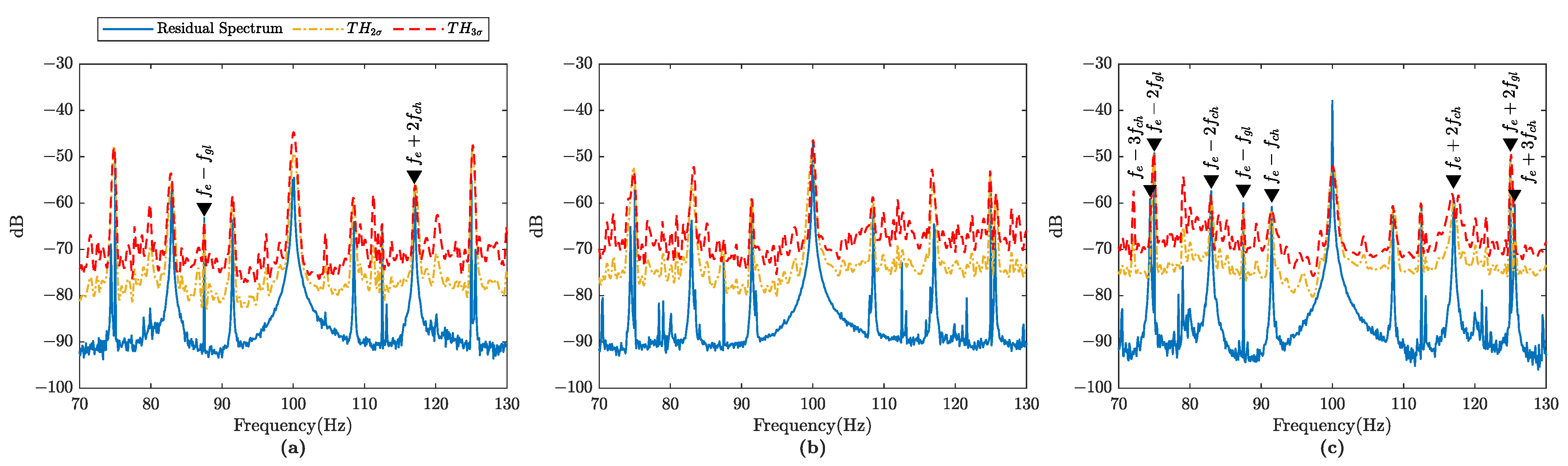
- The model-based FDI mitigates the influence from all the main harmonic frequencies that dominated the spectrum, thus leaving the fault frequencies in the residual current spectrum more visible. The fault frequencies magnitudes are evaluated using the residual current spectrum threshold without the need of expert knowledge. This approach has not been considered in MCSA before.
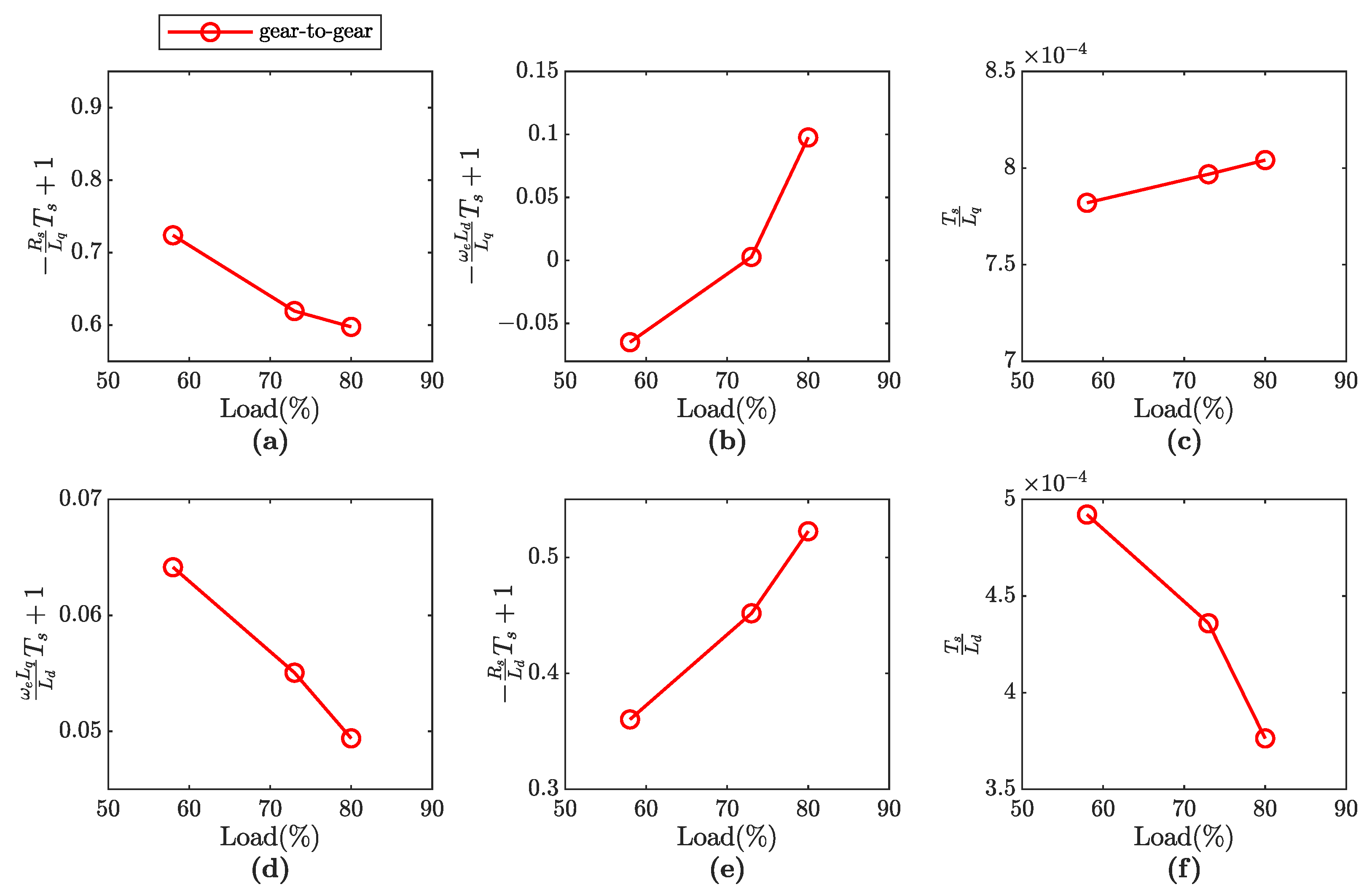
- A preliminary study to verify the model compatibility with the data in various load conditions.
- An indirect measurement approach for the transmission FDI. Most of the transmission FDIs are vibration-based that requires direct measurement in the transmission location. This approach is considered expensive and not always feasible in the cases where the vibration transducers cannot be installed at the designated location.
2. PMSM and Transmission Mathematical Models
2.1. Coordinate Transformation
2.2. PMSM Differential Equation
2.3. Transmission Model
3. A Systematic Model-Based Fault Diagnosis Scheme
3.1. Parameter Estimation via Recursive Least Square
| Algorithm 1 RLS algorithm |
|
3.2. Baseline Model and Residual Current Spectrum Threshold
| Algorithm 2 Baseline model identification | |
| |
| ▹ identified parameters mean |
| ▹ PMSM baseline model |
| Algorithm 3 Residual current spectrum threshold development | |
| |
| ▹ residual current spectrum |
| |
| ▹ residual current spectrum mean |
| ▹ residual current spectrum standard deviation |
| ▹ threshold |
| ▹ threshold |
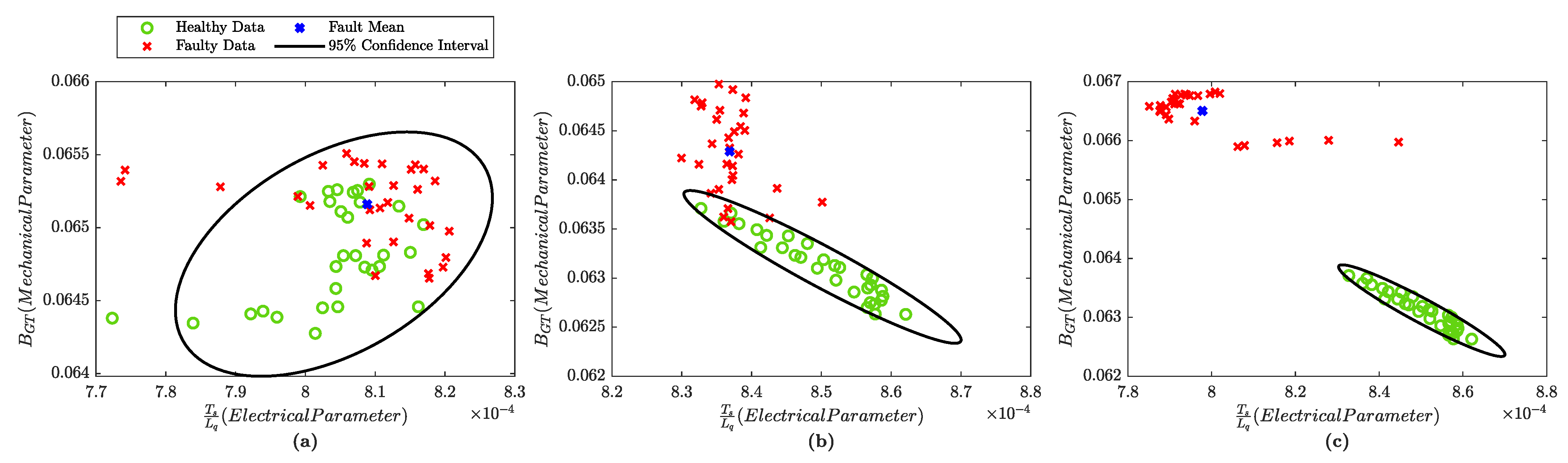
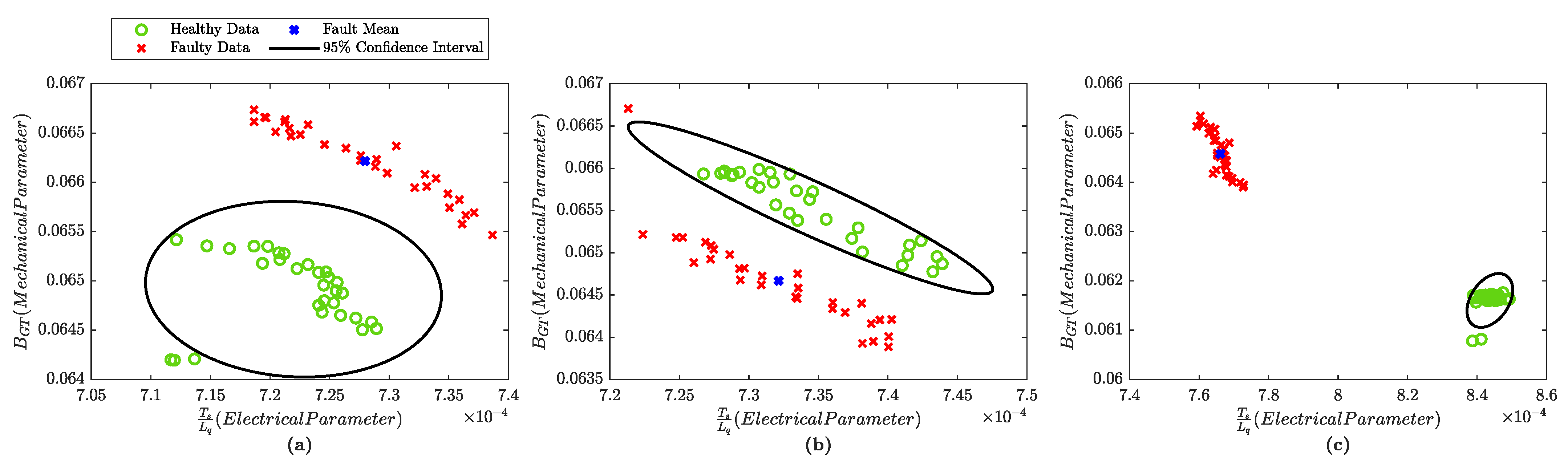
3.3. Parameter Clustering
| Algorithm 4 Healthy parameter confidence interval |
|
3.4. Fault Characteristic Frequency Detection
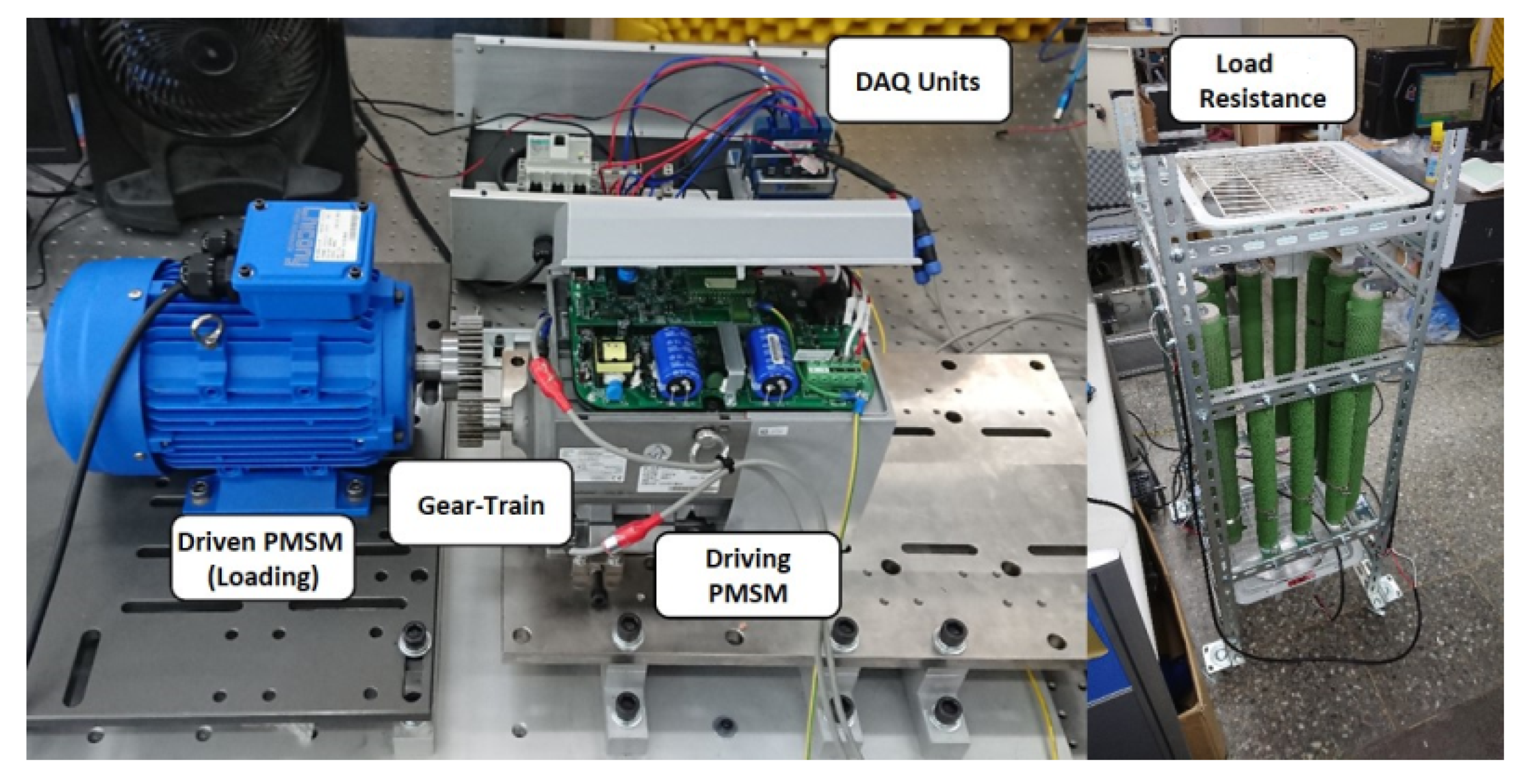
4. Experimental Setup
4.1. PMSM Load Experimental Platform
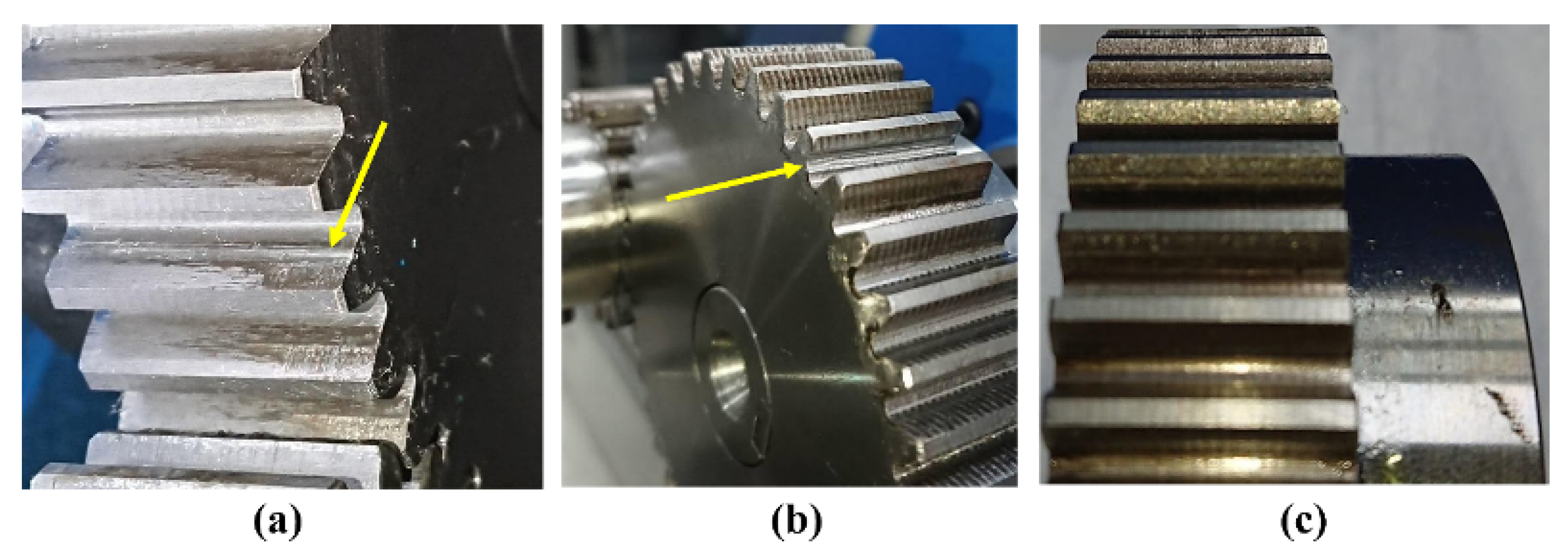
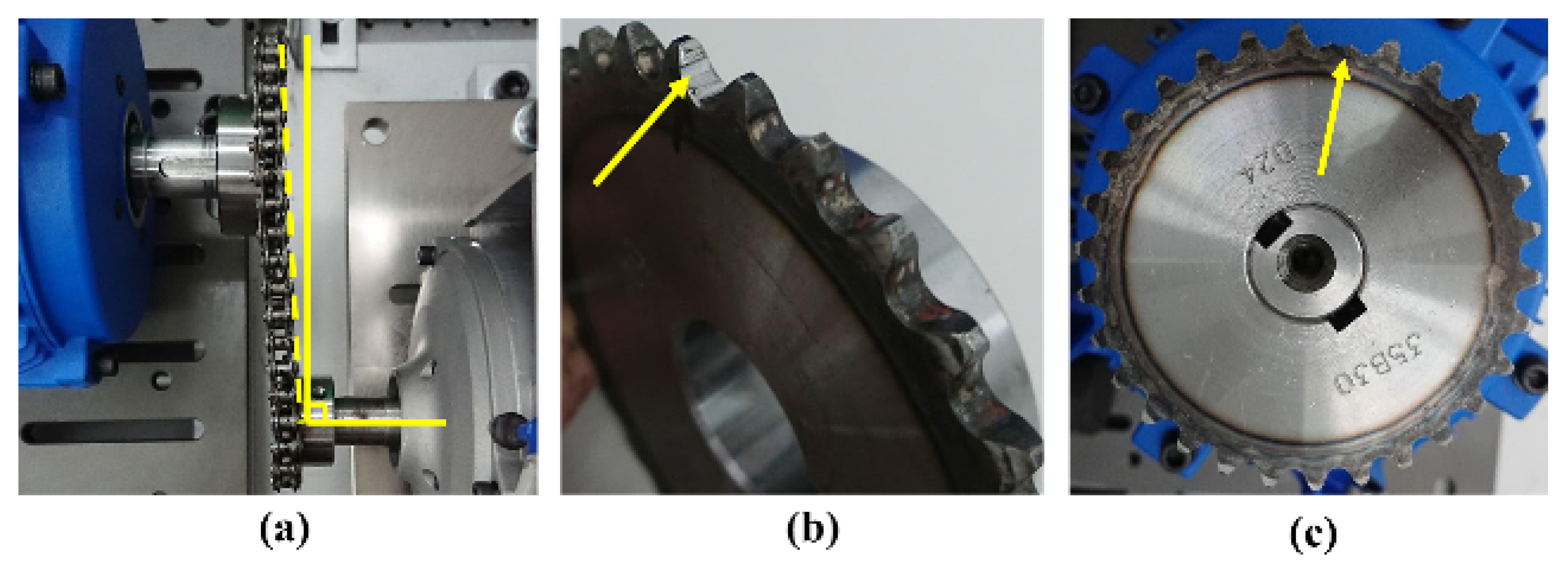
4.2. Transmission Faulty Specimens
5. Results and Discussions
5.1. Fault Detection and Identification
5.2. Load Variations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FDI | Fault detection and identification |
| FFT | Fast Fourier transform |
| MCSA | Motor current signature analysis |
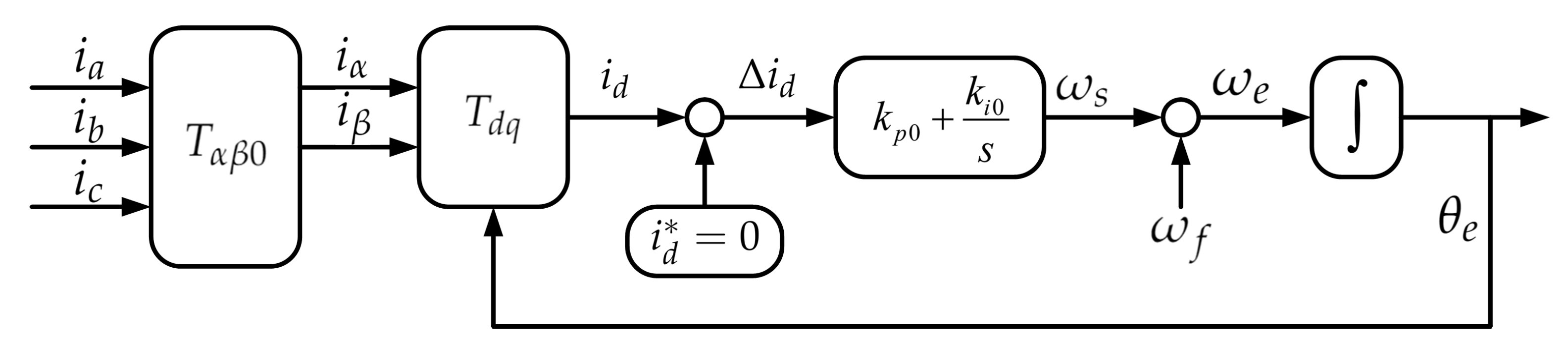
| PLL | Phase-locked loop |
| PMSM | Permanent magnet synchronous motor |
| RLS | Recursive least-square |
References
- Mohanty, A.; Kar, C. Fault Detection in a Multistage Gearbox by Demodulation of Motor Current Waveform. IEEE Trans. Ind. Electron. 2006, 53, 1285–1297. [Google Scholar] [CrossRef]
- Yuan, X.; Cai, L. Variable amplitude Fourier series with its application in gearbox diagnosis—Part I: Principle and simulation. Mech. Syst. Signal Process. 2005, 19, 1055–1066. [Google Scholar] [CrossRef]
- Wang, X.; Makis, V.; Yang, M. A wavelet approach to fault diagnosis of a gearbox under varying load conditions. J. Sound Vib. 2010, 329, 1570–1585. [Google Scholar] [CrossRef]
- Chen, X.; Feng, Z. Time-Frequency Analysis of Torsional Vibration Signals in Resonance Region for Planetary Gearbox Fault Diagnosis Under Variable Speed Conditions. IEEE Access 2017, 5, 21918–21926. [Google Scholar] [CrossRef]
- Zak, G.; Wylomanska, A.; Zimroz, R. Local Damage Detection Method Based on Distribution Distances Applied to Time-Frequency Map of Vibration Signal. IEEE Trans. Ind. Appl. 2018, 54, 4091–4103. [Google Scholar] [CrossRef]
- Jung, J.; Lee, S.B.; Lim, C.; Cho, C.H.; Kim, K. Electrical Monitoring of Mechanical Looseness for Induction Motors With Sleeve Bearings. IEEE Trans. Energy Convers. 2016, 31, 1377–1386. [Google Scholar] [CrossRef]
- Kia, S.; Henao, H.; Capolino, G.A. Analytical and Experimental Study of Gearbox Mechanical Effect on the Induction Machine Stator Current Signature. IEEE Trans. Ind. Appl. 2009, 45, 1405–1415. [Google Scholar] [CrossRef]
- Purbowaskito, W.; Lan, C.Y.; Liu, M.K.; Fuh, K. A Novel Scheme on Fault Diagnosis of Induction Motors using Current per Voltage Bode Diagram. J. Chin. Soc. Mech. Eng. 2020, 41, 781–790. [Google Scholar]
- Zhang, R.; Gu, F.; Mansaf, H.; Wang, T.; Ball, A.D. Gear wear monitoring by modulation signal bispectrum based on motor current signal analysis. Mech. Syst. Signal Process. 2017, 94, 202–213. [Google Scholar] [CrossRef]
- ISO 20958:2013; Condition monitoring and diagnostics of machine systems—Electrical signature analysis of three-phase induction motors. Standard, International Organization for Standardization: Geneva, Switzerland, 2013.
- Chen, J.; Yang, F. Data-driven subspace-based adaptive fault detection for solar power generation systems. IET Contr. Theory Appl. 2013, 7, 1498–1508. [Google Scholar] [CrossRef]
- Dai, X.; Gao, Z. From Model, Signal to Knowledge: A Data-Driven Perspective of Fault Detection and Diagnosis. IEEE Trans. Ind. Informatics 2013, 9, 2226–2238. [Google Scholar] [CrossRef] [Green Version]
- Krause, P.; Wasynczuk, O.; Sudhoff, S.; Pekarek, S. (Eds.) Analysis of Electric Machinery and Drive Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Mazzoletti, M.A.; Bossio, G.R.; Angelo, C.H.D.; Espinoza-Trejo, D.R. A Model-Based Strategy for Interturn Short-Circuit Fault Diagnosis in PMSM. IEEE Trans. Ind. Electron. 2017, 64, 7218–7228. [Google Scholar] [CrossRef]
- Kiselev, A.; Kuznietsov, A.; Leidhold, R. Model based online detection of inter-turn short circuit faults in PMSM drives under non-stationary conditions. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering, Cadiz, Spain, 4–6 April 2017. [Google Scholar] [CrossRef]
- Zhan, H.; Zhu, Z.Q.; Odavic, M.; Li, Y. A Novel Zero-Sequence Model-Based Sensorless Method for Open-Winding PMSM With Common DC Bus. IEEE Trans. Ind. Electron. 2016, 63, 6777–6789. [Google Scholar] [CrossRef]
- Hang, J.; Zhang, J.; Ding, S.; Huang, Y.; Wang, Q. A Model-Based Strategy With Robust Parameter Mismatch for Online HRC Diagnosis and Location in PMSM Drive System. IEEE Trans. Power Electron. 2020, 35, 10917–10929. [Google Scholar] [CrossRef]
- Kommuri, S.K.; Defoort, M.; Karimi, H.R.; Veluvolu, K.C. A Robust Observer-Based Sensor Fault-Tolerant Control for PMSM in Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 7671–7681. [Google Scholar] [CrossRef]
- Zhang, J.; Yao, H.; Rizzoni, G. Fault Diagnosis for Electric Drive Systems of Electrified Vehicles Based on Structural Analysis. IEEE Trans. Veh. Technol. 2017, 66, 1027–1039. [Google Scholar] [CrossRef]
- Overschee, P.V.; Moor, B.D. Subspace Identification for Linear Systems; Kluwer Academic: Dordrecht, The Netherlands, 1996. [Google Scholar] [CrossRef]
- Purbowaskito, W.; Lan, C.Y.; Fuh, K. A Novel Fault Detection and Identification Framework for Rotating Machinery Using Residual Current Spectrum. Sensors 2021, 21, 5865. [Google Scholar] [CrossRef]
- Tariq, M.F.; Khan, A.Q.; Abid, M.; Mustafa, G. Data-Driven Robust Fault Detection and Isolation of Three-Phase Induction Motor. IEEE Trans. Ind. Electron. 2019, 66, 4707–4715. [Google Scholar] [CrossRef]
- Brosch, A.; Hanke, S.; Wallscheid, O.; Bocker, J. Data-Driven Recursive Least Squares Estimation for Model Predictive Current Control of Permanent Magnet Synchronous Motors. IEEE Trans. Power Electron. 2021, 36, 2179–2190. [Google Scholar] [CrossRef]
- Vahidi, A.; Stefanopoulou, A.; Peng, H. Recursive least squares with forgetting for online estimation of vehicle mass and road grade: Theory and experiments. Veh. Syst. Dyn. 2005, 43, 31–55. [Google Scholar] [CrossRef]
- Kuen, H.Y.; Mjalli, F.S.; Koon, Y.H. Recursive Least Squares-Based Adaptive Control of a Biodiesel Transesterification Reactor. Ind. Eng. Chem. Res. 2010, 49, 11434–11442. [Google Scholar] [CrossRef]
- Souza, D.A.D.; Batista, J.G.; Vasconcelos, F.J.S.; Reis, L.L.N.D.; Machado, G.F.; Costa, J.R.; Junior, J.N.N.; Silva, J.L.N.; Rios, C.S.N.; Junior, A.B.S. Identification by Recursive Least Squares With Kalman Filter (RLS-KF) Applied to a Robotic Manipulator. IEEE Access 2021, 9, 63779–63789. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Habetler, T.G.; Harley, R.G.; Sebastian, T.; Lequesne, B. Current/Voltage-Based Detection of Faults in Gears Coupled to Electric Motors. IEEE Trans. Ind. Appl. 2006, 42, 1412–1420. [Google Scholar] [CrossRef]
- Kang, T.J.; Yang, C.; Park, Y.; Hyun, D.; Lee, S.B.; Teska, M. Electrical Monitoring of Mechanical Defects in Induction Motor-Driven V-Belt–Pulley Speed Reduction Couplings. IEEE Trans. Ind. Appl. 2018, 54, 2255–2264. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problems | Output | Input | Parameters |
|---|---|---|---|
| RLS 1 (Equation (13)) | |||
| RLS 2 (Equation (14)) | |||
| RLS 3 (Equation (15)) |
| Parameters | Driving PMSM | Driven PMSM | Units |
|---|---|---|---|
| Rated Voltage | 380 | 380 | Volt |
| Rated Current | 6.6 | 8.3 | Amp |
| Rated Power | 2.2 | 3.7 | kW |
| Rated Speed | 1500 | 1500 | RPM |
| Rated Torque | 14 | 23.6 | Nm |
| Poles | 4 | 4 | pair |
| Efficiency | 89.4 | 91.9 | % |
| Driving Gear | Driven Gear | Units | ||
|---|---|---|---|---|
| gear-to-gear | No. teeth | 20 | 40 | - |
| Pressure angle | 20 | 20 | ||
| Gear module | 2 | 2 | - | |
| sprocket–chain | No. teeth | 15 | 30 | - |
| Pitch circle diameter | 45.81 | 91.12 | mm | |
| Chain length | 423 | mm | ||
| Transmission | Fault | Load | Residual Current Spectrum | Parameter Cluster |
|---|---|---|---|---|
| gear-to-gear | slightly worn | 80% | caution | normal |
| severely worn | 80% | warning | warning | |
| no lubricant | 80% | warning | warning | |
| sprocket–chain | chain offset | 80% | warning | warning |
| slightly worn | 80% | normal | warning | |
| one missing tooth | 80% | warning | warning |
| 58% Load Estimated Signal | 73% Load Estimated Signal | 80% Load Estimated Signal | |
|---|---|---|---|
| 58% Load Measured Signal | 2.77% | 5.73% | 7.85% |
| 73% Load Measured Signal | 7.32% | 2.11% | 4.18% |
| 80% Load Measured Signal | 16.76% | 5.58% | 1.90% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Purbowaskito, W.; Wu, P.-Y.; Lan, C.-Y. Permanent Magnet Synchronous Motor Driving Mechanical Transmission Fault Detection and Identification: A Model-Based Diagnosis Approach. Electronics 2022, 11, 1356. https://doi.org/10.3390/electronics11091356
Purbowaskito W, Wu P-Y, Lan C-Y. Permanent Magnet Synchronous Motor Driving Mechanical Transmission Fault Detection and Identification: A Model-Based Diagnosis Approach. Electronics. 2022; 11(9):1356. https://doi.org/10.3390/electronics11091356
Chicago/Turabian StylePurbowaskito, Widagdo, Po-Yan Wu, and Chen-Yang Lan. 2022. "Permanent Magnet Synchronous Motor Driving Mechanical Transmission Fault Detection and Identification: A Model-Based Diagnosis Approach" Electronics 11, no. 9: 1356. https://doi.org/10.3390/electronics11091356