
De-Speckling Breast Cancer Ultrasound Images Using a Rotationally Invariant Block Matching Based Non-Local Means (RIBM-NLM) Method

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. The Denoising Process
- Estimate the rotation angle between and ;
- For each pixel in , find the corresponding pixel in via rotation by the estimated angle;
- The sum of the intensity differences in pixels and corresponding pixels is the required distance.
2.2. Experimental Setup and Materials
3. Results
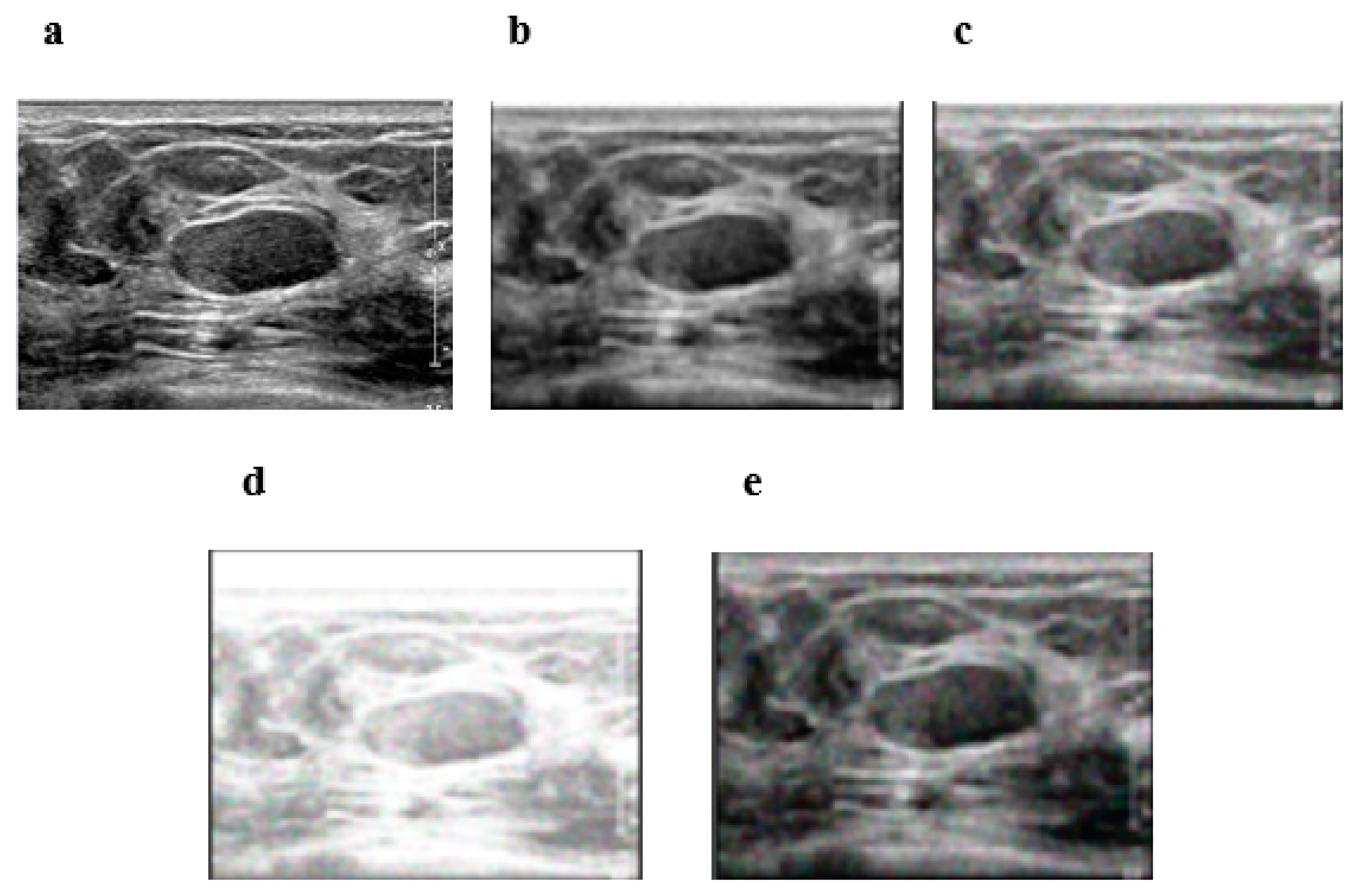
3.1. Private Dataset Image Results
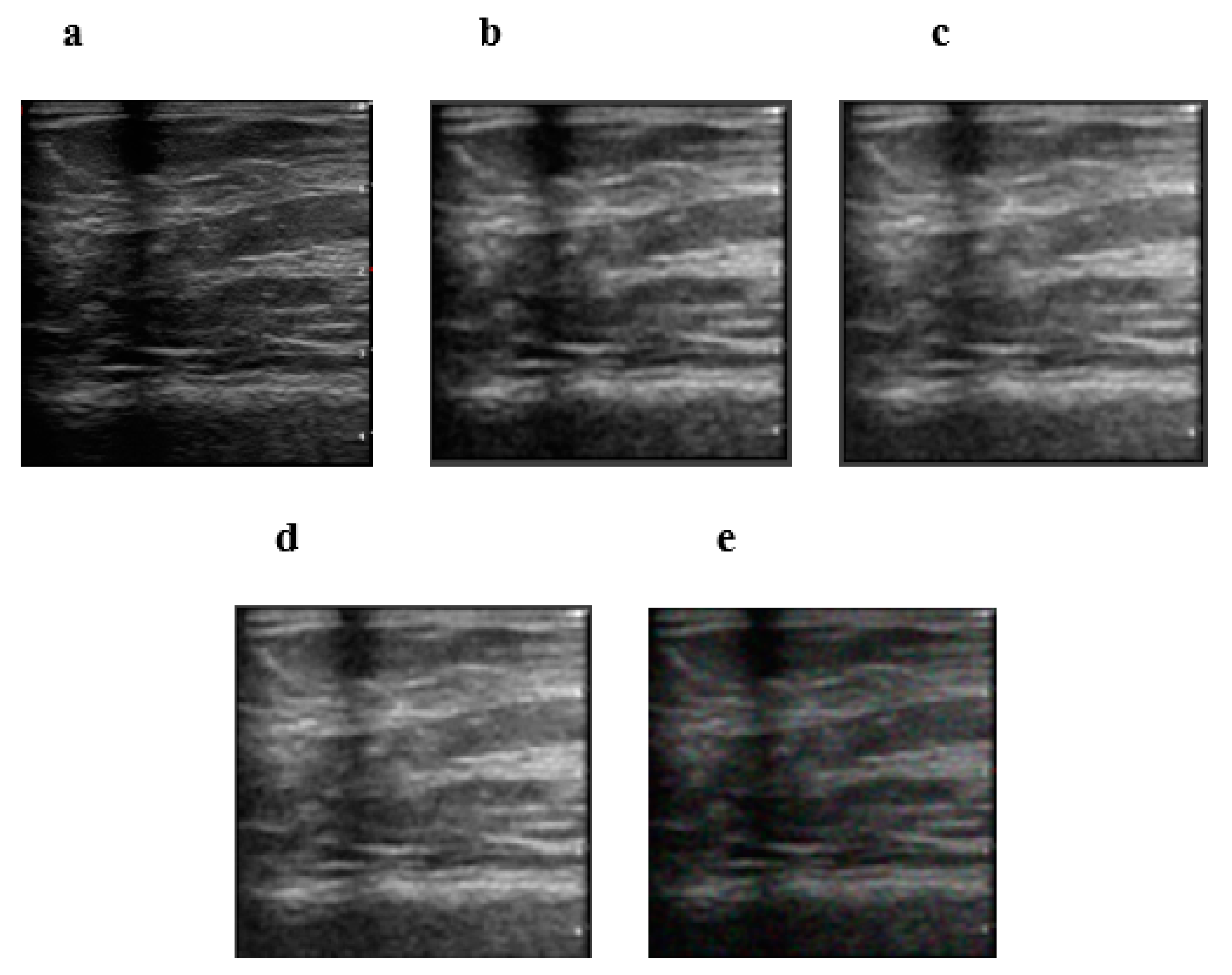
3.2. Private Dataset Image Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ouyang, J.; Tang, Z.; Farokhzad, N.; Kong, N.; Kim, N.Y.; Feng, C.; Blake, S.; Xiao, Y.; Liu, C.; Xie, T.; et al. Ultrasound Mediated Therapy: Recent Progress and Challenges in Nanoscience. Nano Today 2020, 35, 100949. [Google Scholar] [CrossRef]
- Ayana, G.; Park, J.; Jeong, J.W.; Choe, S.W. A Novel Multistage Transfer Learning for Ultrasound Breast Cancer Image Classification. Diagnostics 2022, 12, 135. [Google Scholar] [CrossRef] [PubMed]
- Ayana, G.; Dese, K.; Choe, S. Transfer Learning in Breast Cancer Diagnoses via Ultrasound Imaging. Cancers 2021, 13, 738. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Xue, Y.; Tian, L. Deep Speckle Correlation: A Deep Learning Approach toward Scalable Imaging through Scattering Media. Optica 2018, 5, 1181. [Google Scholar] [CrossRef]
- Zapata, J.; Ruiz, R. On Speckle Noise Reduction in Medical Ultrasound Images. In Proceedings of the 9th WSEAS International Conference on Signal, Speech and Image Processing, Budapest, Hungary, 3–5 September 2009; pp. 126–131. [Google Scholar]
- Maity, A.; Pattanaik, A.; Sagnika, S.; Pani, S. A Comparative Study on Approaches to Speckle Noise Reduction in Images. In Proceedings of the 2015 1st International Conference on Computational Intelligence and Networks, CINE, Bhubaneswar, India, 12–13 January 2015; pp. 148–155. [Google Scholar] [CrossRef]
- Damerjian, V.; Tankyevych, O.; Souag, N.; Petit, E. Speckle Characterization Methods in Ultrasound Images-A Review. Irbm 2014, 35, 202–213. [Google Scholar] [CrossRef]
- Dass, R. Speckle Noise Reduction of Ultrasound Images Using BFO Cascaded with Wiener Filter and Discrete Wavelet Transform in Homomorphic Region. Procedia Comput. Sci. 2018, 132, 1543–1551. [Google Scholar] [CrossRef]
- Lee, J.-S. Digital Image Enhancement and Noise Filtering by Use of Local Statistics. IEEE Trans. Pattern Anal. Mach. Intell. 1980, PAMI-2, 165–168. [Google Scholar] [CrossRef] [Green Version]
- Ren, R.; Guo, Z.; Jia, Z.; Yang, J.; Kasabov, N.K.; Li, C. Speckle Noise Removal in Image-Based Detection of Refractive Index Changes in Porous Silicon Microarrays. Sci. Rep. 2019, 9, 15001. [Google Scholar] [CrossRef]
- Frost, V.S.; Stiles, J.A.; Shanmugan, K.S.; Holtzman, J.C. A Model for Radar Images and Its Application to Adaptive Digital Filtering of Multiplicative Noise. IEEE Trans. Pattern Anal. Mach. Intell. 1982, PAMI-4, 157–166. [Google Scholar] [CrossRef]
- Kulkarni, S.; Kedar, M.; Rege, P.P. Comparison of Different Speckle Noise Reduction Filters for RISAT -1 SAR Imagery. In Proceedings of the 2018 International Conference on Communication and Signal Processing, ICCSP 2018, Chennai, India, 3–5 April 2018; pp. 537–541. [Google Scholar] [CrossRef]
- Elad, M. On the Origin of the Bilateral Filter and Ways to Improve It. IEEE Trans. Image Process. 2002, 11, 1141–1151. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.; Sharma, B.; Singh, J.; Srivastava, G.; Sharma, S.; Aggarwal, A.; Cheng, X. Local Statistics-Based Speckle Reducing Bilateral Filter for Medical Ultrasound Images. Mob. Netw. Appl. 2020, 25, 2367–2389. [Google Scholar] [CrossRef]
- Yu, Y.; Acton, S.T. Speckle Reducing Anisotropic Diffusion. IEEE Trans. Image Process. 2002, 11, 1260–1270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krissian, K.; Westin, C.; Kikinis, R.; Vosburgh, K.G. Oriented Speckle Reducing Anisotropic Diffusion. IEEE Trans. Image Process. 2007, 16, 1412–1424. [Google Scholar] [CrossRef] [PubMed]
- Pižurica, A.; Philips, W.; Lemahieu, I.; Acheroy, M. A Versatile Wavelet Domain Noise Filtration Technique for Medical Imaging. IEEE Trans. Med. Imaging 2003, 22, 323–331. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Lin, G.; Wu, L.; Wang, C.; Cheng, Y. Wavelet and Fast Bilateral Filter Based De-Speckling Method for Medical Ultrasound Images. Biomed. Signal Process. Control 2015, 18, 1–10. [Google Scholar] [CrossRef]
- Coupe, P.; Yger, P.; Prima, S.; Hellier, P.; Kervrann, C.; Barillot, C. An Optimized Blockwise Nonlocal Means Denoising Filter for 3-D Magnetic Resonance Images. IEEE Trans. Med. Imaging 2008, 27, 425–441. [Google Scholar] [CrossRef] [Green Version]
- Coupé, P.; Hellier, P.; Kervrann, C.; Barillot, C. Nonlocal Means-Based Speckle Filtering for Ultrasound Images. IEEE Trans. Image Process. 2009, 18, 2221–2229. [Google Scholar] [CrossRef] [Green Version]
- Kervrann, C.; Boulanger, J.; Coupé, P. Bayesian Non-Local Means Filter, Image Redundancy and Adaptive Dictionaries for Noise Removal. Lect. Notes Comput. Sci. 2007, 4485, 520–532. [Google Scholar] [CrossRef] [Green Version]
- Deledalle, C.A.; Denis, L.; Tupin, F. Iterative Weighted Maximum Likelihood Denoising with Probabilistic Patch-Based Weights. IEEE Trans. Image Process. 2009, 18, 2661–2672. [Google Scholar] [CrossRef] [Green Version]
- Dabov, K.; Foi, A.; Egiazarian, K. Video Denoising by Sparse 3D Transform-Domain Collaborative Filtering. In Proceedings of the 2007 15th European Signal Processing Conference, Poznań, Poland, 3–7 September 2007; Volume 16, pp. 145–149. [Google Scholar]
- Parrilli, S.; Poderico, M.; Angelino, C.V.; Verdoliva, L. A Nonlocal SAR Image Denoising Algorithm Based on LLMMSE Wavelet Shrinkage. IEEE Trans. Geosci. Remote Sens. 2012, 50, 606–616. [Google Scholar] [CrossRef]
- Goyal, B.; Dogra, A.; Agrawal, S.; Sohi, B.S.; Sharma, A. Image Denoising Review: From Classical to State-of-the-Art Approaches. Inf. Fusion 2020, 55, 220–244. [Google Scholar] [CrossRef]
- Ovireddy, S.; Muthusamy, E. Speckle Suppressing Anisotropic Diffusion Filter for Medical Ultrasound Images. Ultrason. Imaging 2014, 36, 112–132. [Google Scholar] [CrossRef]
- Prabusankarlal, K.M.; Manavalan, R.; Sivaranjani, R. An Optimized Non-Local Means Filter Using Automated Clustering Based Preclassification through Gap Statistics for Speckle Reduction in Breast Ultrasound Images. Appl. Comput. Inf. 2018, 14, 48–54. [Google Scholar] [CrossRef]
- Huang, S.; Zhou, P.; Shi, H.; Sun, Y.; Wan, S. Image Speckle Noise Denoising by a Multi-Layer Fusion Enhancement Method Based on Block Matching and 3D Filtering. Imaging Sci. J. 2019, 67, 224–235. [Google Scholar] [CrossRef]
- Yan, R.; Shao, L.; Cvetković, S.D.; Klijn, J. Improved Nonlocal Means Based on Pre-Classification and Invariant Block Matching. IEEE/OSA J. Disp. Technol. 2012, 8, 212–218. [Google Scholar] [CrossRef]
- Hu, M.-K. Visual Pattern Recognition by Moment Invariants. IRE Trans. Inf. Theory 1962, 49, 179–187. [Google Scholar]
- Grewenig, S.; Zimmer, S.; Weickert, J. Rotationally Invariant Similarity Measures for Nonlocal Image Denoising. J. Vis. Commun. Image Represent. 2011, 22, 117–130. [Google Scholar] [CrossRef] [Green Version]
- Misra, A.B.; Lim, H. Nonlocal Speckle Denoising Model Based on Non-Linear Partial Differential Equations. In Information Systems Design and Intelligent Applications; Springer: New Delhi, India, 2015; pp. 165–176. [Google Scholar]
- Pang, C.; Au, O.C.; Dai, J.; Yang, W.; Zou, F. A Fast NL-Means Method in Image Denoising Based on the Similarity of Spatially Sampled Pixels. In Proceedings of the 2009 IEEE International Workshop on Multimedia Signal Processing, MMSP’09, Rio de Janeiro, Brazil, 5–7 October 2009; pp. 3–6. [Google Scholar] [CrossRef]
- Balocco, S.; Gatta, C.; Pujol, O.; Mauri, J.; Radeva, P. SRBF: Speckle Reducing Bilateral Filtering. Ultrasound Med. Biol. 2010, 36, 1353–1363. [Google Scholar] [CrossRef]
- Rodrigues, P.S. Breast Ultrasound Image. Mendeley Data 2018. [Google Scholar] [CrossRef]
- Thaipanich, T.; Oh, B.T.; Wu, P.H.; Xu, D.; Kuo, C.C.J. Improved Image Denoising with Adaptive Nonlocal Means (ANL-Means) Algorithm. IEEE Trans. Consum. Electron. 2010, 56, 2623–2630. [Google Scholar] [CrossRef]
- Agresti, A.; Coull, B.A. Approximate Is Better than “Exact” for Interval Estimation of Binomial Proportions. Am. Stat. 1998, 52, 119. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Proposed | ONLMF | NLMF | SBF |
|---|---|---|---|---|
| SSIM, at σ = 20 | 0.8915 | 0.7594 | 0.7284 | 0.8271 |
| Method | Proposed | ONLMF | NLMF | SBF |
|---|---|---|---|---|
| SSIM, at σ = 20 | 0.8307 | 0.7241 | 0.6963 | 0.8148 |
| Image | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | MSE | RMSE | t(s) | PSNR | MSE | RMSE | t(s) | PSNR | MSE | RMSE | t(s) | |
| CI1 | 71.3869 | 0.003314 | 0.057567 | 81.003529 | 66.9903 | 0.016732 | 0.129352 | 82.858238 | 55.146 | 0.282528 | 0.531533 | 83.405858 |
| CI2 | 72.8369 | 0.00339 | 0.058223 | 80.160006 | 66.0016 | 0.011358 | 0.106573 | 82.474946 | 55.8126 | 0.269671 | 0.519298 | 84.678944 |
| CI3 | 71.594 | 0.003678 | 0.060646 | 82.375192 | 65.2058 | 0.015101 | 0.122886 | 82.564148 | 55.0384 | 0.236662 | 0.486479 | 83.601501 |
| CI4 | 72.7233 | 0.003046 | 0.055190 | 82.34266 | 66.9023 | 0.019146 | 0.138369 | 83.244738 | 54.2856 | 0.228034 | 0.477529 | 84.899632 |
| CI5 | 72.177 | 0.003978 | 0.063071 | 80.703136 | 65.7659 | 0.016782 | 0.129545 | 82.174985 | 54.7928 | 0.20081 | 0.448118 | 81.204046 |
| CI6 | 72.1992 | 0.003072 | 0.055425 | 82.167858 | 66.7179 | 0.014479 | 0.120328 | 83.648587 | 54.4104 | 0.237003 | 0.486829 | 84.764421 |
| Av. | 72.15288 | 0.003413 | 0.058354 | 81.4587301 | 66.263966 | 0.0155996 | 0.124509 | 82.827607 | 54.9143 | 0.2424513 | 0.491631 | 83.759067 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ayana, G.; Dese, K.; Raj, H.; Krishnamoorthy, J.; Kwa, T. De-Speckling Breast Cancer Ultrasound Images Using a Rotationally Invariant Block Matching Based Non-Local Means (RIBM-NLM) Method. Diagnostics 2022, 12, 862. https://doi.org/10.3390/diagnostics12040862
Ayana G, Dese K, Raj H, Krishnamoorthy J, Kwa T. De-Speckling Breast Cancer Ultrasound Images Using a Rotationally Invariant Block Matching Based Non-Local Means (RIBM-NLM) Method. Diagnostics. 2022; 12(4):862. https://doi.org/10.3390/diagnostics12040862
Chicago/Turabian StyleAyana, Gelan, Kokeb Dese, Hakkins Raj, Janarthanan Krishnamoorthy, and Timothy Kwa. 2022. "De-Speckling Breast Cancer Ultrasound Images Using a Rotationally Invariant Block Matching Based Non-Local Means (RIBM-NLM) Method" Diagnostics 12, no. 4: 862. https://doi.org/10.3390/diagnostics12040862