
Review on the Developments of Structure, Construction Automation, and Monitoring of Intelligent Construction

1
School of Resources and Safety Engineering, Central South University, Changsha 410083, China
2
School of Civil and Mechanical Engineering, Curtin University, Bentley 6102, Australia
3
College of Civil Engineering, Tongji University, Shanghai 201804, China
*
Author to whom correspondence should be addressed.
Buildings 2022, 12(11), 1890; https://doi.org/10.3390/buildings12111890
Submission received: 27 October 2022
/
Revised: 2 November 2022
/
Accepted: 3 November 2022
/
Published: 4 November 2022
(This article belongs to the Special Issue Sustainable Manufacturing in Construction)
Abstract
:The building and construction industry is a traditional industry that features high-capacity investment, long return period, high environment impact, and low technology demand in the past decades. With the fast development of technology and the demand for environmental sustainability, it is inevitable for the building and construction industry to embrace the revolution of technology. Intelligent construction is developed in light of advanced technologies including advanced computing technology, 3D design and manufacturing, automation and control, sensing, unmanned aircraft, and autonomous intelligence. It is also closely integrated with using perceived, analytical, decision-making coordination for building construction with perceived intelligent execution technology in the processes. Currently, there is no consensus definition on “intelligent construction” despite its rapid development. This paper reviews existing and current development in intelligent construction focusing on the following three aspects: (a) new structural forms, which are innovative and with potential or are being applied to automated and mass manufacturing/construction; (b) automated and intelligent construction system; and (c) advanced structure sensing and monitoring technology. These three components do not compromise the entire aspects for intelligent construction, but they have no doubt are the core elements for intelligent construction towards future building systems.
1. Introduction
1.1. Background
With the increase in development of human civilization, industries are actively or passively embracing the revolution and innovation, where the building industry is no exception. The concept of intelligent construction was proposed by the Ministry of Housing and Urban–Rural Development of China in May 2017. There is no generic definition in the world for intelligent construction yet. Generally speaking, it is developed in light of advanced technologies including advanced computing technology, 3D design and manufacturing, automation and control, sensing, unmanned aircrafts, and autonomous intelligence. It is closely integrated with using perceived analytical decision-making coordination for building construction with perceived intelligent execution technology in the processes. It is capable of intelligently adapting to the changes in the dynamic environment to achieve process optimization to improve construction efficiency and quality.
The aims and benefits of intelligent construction are to effectively resolve the legacy problems in the construction industry such as low efficiency, high pollution, and high energy consumption. It will reduce labor demand, improve working environment safety, and ensure building quality and reliability through advanced mass manufacturing, computer-based intelligence, and automation technology.
In response to the fast development in information, communication and technology in the construction industry, the International Council for Research and Innovation in Building sponsored a research for the development of a strategy for future technology impacts on the construction industry [1]. Bowden et al. [2] mapped out the potential impact of information, communication, and technology on the construction industry. Between 2006 and 2010, the European Union supported a 17 mil Euros-worth project—I3CON [3] which stands for Industrialized, Integrated, Intelligent Construction, that was led by DRAGADOS S.A. The aim was to transform the construction industry towards delivering industrialized, integrated, and intelligent buildings with high performance users in Europe. Researchers in the UK began to explore intelligent systems in the construction industry from 2013 [4]. The Australian government funded AUD 28 million for Building 4.0 CRC with a total industry and research institute combined funding of AUD 103 million, focusing on the use of digital solution, new materials and structures, and innovative processes to transform the building industry of Australia to an innovative collaborative future [5]. Purdue University in the USA established the Automation and Intelligent Construction Laboratory with the aim of developing advanced technologies to support construction automation, construction management, and sustainable building, including Construction Robotics, NLP (natural language processing), BIM (building information modeling), AI (artificial intelligence), and VR (virtual reality) [6].
1.2. Aims and Methodology
These mega-projects, initiatives from different countries and regions, indicate the new era of the building industry which is featured with intelligent and autonomous construction technology. Therefore, it is necessary to properly review existing developments and to identify gaps and opportunities, and it is important for engineers and researchers to develop and innovate relevant technologies. Intelligent construction could consist of intelligent design processes, intelligent construction processes, intelligent and robust structural systems, and intelligent detection, management, and maintenance. This review focuses on the following three aspects: (a) new structural forms, which are innovative and with potential or are being applied to automated and mass manufacturing/construction; (b) an automated and intelligent construction system; and (c) advanced structure sensing and monitoring technology. These three components do not compromise the entire aspects for intelligent construction, but they no doubt are the core elements for intelligent construction towards the future building system.
The above three areas covered in this paper are reviewed in four stages including (a) the identification of relevant articles, where the exclusive search engine Google Scholar is used, which could cover the majority of databases; (b) paper screening, where among over 30,000 abstracts of articles found are screened to identify relevant articles on intelligent construction; (c) critical appraisal; and (d) extraction and synthesis.
2. New Structural Forms
To achieve the goal of construction automation and intelligence, in recent years, new structural forms have been innovated and validated. Three types of new structural forms are reviewed herein.
2.1. Additive Manufacturing
2.1.1. Introduction
Additive manufacturing or 3D printing has developed rapidly in recent years, which belongs to the additive manufacturing technology. It consists of printing successive materials in layers form on top of each other to produce a structure and complex geometry in the 3D domain. The method oriented from the USA in 1986, and gradually evolved with a few subsequent printing methods using different materials, and boosted its development with the advancement of computer aid design, more accurate machinery for printing nozzles, as well as the industry demand for transformation of manufacturing and logistics. As one of the sub-stream developments and applications, 3D printing for structure and construction advances with an overwhelming pace with the advantages of reduced construction waste (30–60%), lowered construction labor cost and construction time (50–70%), and improved quality control [7]. Moreover, compared to the conventional manufacturing method, 3D printing enables features such as fabrication of complex geometry, achievement of high precision, and flexibility and ease of design, which have attracted increasing interest from researchers, engineers, architects, and investors. Some comprehensive reviews about additive manufacturing technology are available, such as Ngo et al., who summarized generic 3D printing technology available until February 2018 [8]. Ligon et al. reviewed polymers for 3D printing until 2017 [9]. This section of the paper concentrates on reviewing existing 3D printing concrete structures for the construction industry, where printing methodology, materials and mechanical properties, application, and challenges are discussed.
2.1.2. Type and Methodology
Throughout the development of 3D printing, different printing technologies have been invented and implemented to meet the requirements of printing complex geometries, high accuracy and low defects, elevated printing speeds, large/small object dimensions, and special material properties. Stereolithography [10] is the earliest method of 3D printing for its invention, which employs a UV light to polymerize monomer or resin solution, which can then be shaped into the desired pattern. Fused deposition modelling (FDM) is a very popular method to the public, in which the material is liquidised and then extruded to form layered structures. High speed and cost efficiency characters enable this method to be widely accepted. Nevertheless, the thickness, width, and orientation of each printed layer strongly affect the mechanical performance of the printed structure [11]. ABS (Acrylonitrile Butadiene Styrene) and PLA (polylactic acid), which are commonly used for this printing method, have low strengths which limits its application [11,12]. Powder bed fusion method resolves the problem in FDM, which spreads thin layers of fine powders fused by laser or binder. Powder size is found to determine properties of the printed structures [13,14]. To implement high performance metal and alloy with 3D printing, a direct light fabrication method is developed, which uses laser or electron beams to directly focus on the substrate to melt the printing materials. The melted materials is then fused to the substrate and solidify [15]. So far, aluminium, stainless steel, and titanium could be successfully printed using this method to achieve a high material mechanical performance that can be applied to repair and retrofit critical parts. Inkjet printing is the predominate printing method for concrete structure construction. A premix concrete mixture is pumped through a pipe connected to the printing nozzle onto the substrate in layers. With a large size nozzle compared to the other methods, and a high pressure pump for concrete protrusion, it can quickly print large amount of materials and therefore enables printing of large-scale structures in practise [16]. In engineering application, considering the large volume of a building, instead of 3D printing concrete for the entire structure directly, contour crafting is also popularly adopted, which prints the external edge of the structural component to form an enclosed section, and casts concrete into the central void. D-shape for 3D printing concrete is based on the principal of powder deposition that bonds the cement powder with chemical agent. The printing head is consisting of a number of nozzles for different materials. Similar to the D-shape method, researchers at UC Berkeley developed another method that prints a thin layer of cement powder followed by water spray to activate the paste [17]. Since cement paste takes time to harden, it takes much longer time for the concrete printing process as compared with the other methods.
2.1.3. Material and Properties
Concrete is the predominate material for 3D printing of building structures, while other materials such as ceramic, metal, and polymer etc. are also seen in 3D printing for structural components.
For 3D printing, the workability of concrete is critical for the extruding process, while rigidity after extrusion and adhesion between layers are also required for the success of 3D printed structures. It is therefore ideal to seek concrete mixture with a high viscosity and low yield strength which leads to high plasticity and workability. In addition, a high early strength and short setting time are also needed to print a high concrete structure [18]. Kazeminan et al. [19] proposed a laboratory testing-based framework to examine the printability of concrete for 3D printing. To satisfy these above requirements for 3D printing concrete, Gosselin et al. [20] developed a system as shown in Figure 1, which separates the high workability concrete premix and the hardening agent, and mixes them together at the extrusion nozzle. It therefore enables the rheology of the premix with high workability and long setting time in the mixing and storage facility as well as the high early strength and short setting duration.
Aggregate in the premix could influence the workability of concrete for 3D printing. While large size coarse aggregate is normally excluded considering the size of the nozzle, the properties of fine aggregates such as sizes, grain shape, and modulus were found to have little influence on extrusion [21]. Increasing fineness modulus of sand could increase flowability but reduce viscosity. Crushed fine aggregation in comparison to natural river sand has discontinuous gradation, and therefore decreases the workability due to increased friction with the pipeline.
Different types of fibre have been added into the premix to improve the tensile properties, and rheology for 3D printing concrete. For example, Hambach et al. [22] examined cement paste for 3D printing with carbon, basalt and glass fibres, and achieved a flexural tensile strength of 18.5 MPa with 1% of fibre. Soltan and Li [23] studies the early and hardened properties of fibre reinforced concrete, and reported shorten hardening time could be achieved by adding nano-clay or replacing silica sand with finer silica ground.
Other than ordinary Portland-based concrete (OPC), ultra-high performance concrete (UHPC) and environmentally friendly geopolymer have also been used for 3D printing. For instance, Gosselin et al. [20] developed a UHPC for 3D printing with a compressive strength over 120 MPa. Xia et al. [24] produced a mixture of geopolymer with reported good extrudability, shape retention and buildability at a compressive strength of 16.5 MPa. Zhong et al. [25] also developed a nano-particle added geopolymer for 3D printing concrete with a higher compressive strength of 30 MPa.
Since concrete is printed in layers, the interlayer bonding strength is a major concern for 3D printed concrete structures. Laboratory tests showed that smaller maximum aggregate size and higher cement ratio could increase interlayer bonding strength [26]. The bonding strength would also decrease as the resting time from mixing to being extruded increases [27,28].
2.1.4. Application and Potentials
3D printing was used for quickly creating prototype parts. As additive processes improved, 3D printing technology is employed by architects to build scaled models of structures, which is then introduced into BIM (building information modeling). Nowadays, 3D printing is a promising trend for construction which have attacked much attention from researchers and engineers with ambitious initiatives. Some milestone projects are summarized below:
- The first application of 3D printing for construction was to build a wall at the University of South California in 2004.
- A canal house was built using 3D printing technology in Amsterdam in 2014.
- In 2015, an about 230 m2 house was 3D printed in 20 h as proposed by Khoshnevis [29].
- A 3D-printed mansion (multi-storeies) was built in China in 2016.
- In 2016, 3D printing technology was adopted by the Dubai Future Foundation to build its Office of the Future which is recognized to be the milestone for 3D printing to be used in the commercial construction for the first time.
- In 2017, the Institute of Advanced Architecture of Catalonia, Spain designed and built the world’s first 3D printed bridge of 12 m span which consisted of eight segments of D-Shape printed concrete [30].
With the development in 3D printing for buildings, more and more applications have been reported throughout the world. According to a study by Autodeks, the 3D printing concrete market was predicted to have a value of U$56.4 million in 2021, spurred b new and innovative projects, which is forecast to grow into a market of U$1.5 billion worth by 2024.
3D printing concrete can be both gantry-based and frame-mounted. The manufacturing process can be both off-site or on-site [31]. Despite the conceptual advantages in engineering applications, even when carried out off-site, material waste of dumped concrete mixture due to unstable properties and a lack of printing imprecision leading to more labor demand for correction are still the practical challenges for 3D printing in construction [32]. Another technical challenge is the inclusion of reinforcement for 3D printing concrete structures. Hack and Lauer developed a mesh moulding technology which utilizes a six-axis robot to extrude thermoplastic polymers to print structures in situ in the 3D domain, which acts as reinforcement for later concrete infill [33,34].
2.1.5. Potentials and Challenges
Potentials
The vast interests and innovative applications of 3D printing concrete structures have demonstrated the advantages of this new structural forms such as reducing construction waste (conceptually but still challenging in practice), and achieving complex shape and geometry that could not be possible using conventional methods.
Moreover, the research and development on 3D printing concrete structures have also extended the new features and potentials such as the repairing and restoring of damaged structures. Since 3D printing of concrete could achieve very complex shapes and geometry with high accuracy but minimized labor efforts, some researchers introduced digital imaging technique [35] and/or laser scanning method [36] to scan spall damaged or historical concrete structures, and then off-site printed a high strength concrete patch.
When combining 3D printing concrete structures with automation, construction in harsh or sensitive environments such as war zones, radiative areas, and even the Lunar or on Mars becomes feasible. For instance, NASA carried out a research project aiming to produce oxygen from materials on the Moon and to produce construction materials which can be used for 3D printing construction [37]. Meanwhile, Werkheiser et al. managed to validate this concept by printing a structural component using simulated regolith [38].
A broader concept of 3D printing technology, which could be employed for structural component manufacturing, also shows the great potential in manufacturing advanced protective structural components. In recent years, various protective structure/components, such as origami structures [39], meta-material/structures [40,41], auxetic structures [42,43], and nature-inspired structures [44] etc., which are different to manufacturing using conventional methods, becomes achievable using 3D printing technology. These structural components could be assembled to structures to improve their hazard resistance against blast and impact loadings.
Challenges
- Design guidelines: currently there is no generic design guide for 3D printed structures. Most existing structures and projects are still case by case for validation or advertising purposes. Mass production and application is therefore not ready yet.
- Structural performance: most existing studies concentrate on material properties to achieve 3D printing purpose and to improve buildability and construction efficiency, while the structural performance of 3D printed structures is still not fully investigated. Furthermore, the hazard resistances including earthquakes, impacts, cyclones, blasts etc., as well as mitigation methods, are not yet available.
- Cost: much higher costs of materials for 3D printing concrete, due to the addition of pricy nano materials and chemical admixtures. The initial equipment cost is also a lot higher, which could not be averaged by the total number of engineering projects that is unfortunately still small. There is still no meaningful direct cost comparison between 3D printing concrete structures and conventional concrete structures. However, Geert et al. [45] studied the cost structure and ratio of 3D printed building with conventional building methods, and demonstrated that for a typical straight wall, about 56% of the total cost is on labor for conventional building methods, while only 36% for 3D printing concrete structures; however, material cost is only 23% for conventional methods while 45% for 3D printing.
2.2. Prefabrication and Module Construction
2.2.1. Introduction
Prefabrication and modular construction are other new types of structural forms, which shows much potential for intelligent and automated construction. They are designed and manufactured in the warehouses, and then delivered to site and erected on-site. In the off-site construction phase, not only the structural components can be prefabricated, the internal finishes including utilities which are very time consuming and labor intensive can also be achieved. This feature therefore enables the automated and intelligent onsite construction [46].
Compared to traditional construction methods, prefabrication and modular constructions have a number of advantages, which include higher construction efficiency, a safer building environment, a shorter project duration, better building quality, less labor intensity, and less material waste, etc. [47,48,49,50,51,52,53].
The reduction of environmental impact from prefabricated and modular is significant. For conventional construction, a survey by Pons [54] found that 32% of global energy consumption, about 35% of waste, and 30% of greenhouse emissions are due to building processes. For instance, construction waste accounts for 37% of all waste in Hong Kong, which is only 50% of what it is in the UK [55,56]. Therefore, prefabrication with the advantages of less waste would be a viable solution. Lawson et al. [57] carried out an investigation and found modular construction can reduce 70% of landfill waste and delivery-related waste compared to conventional on-site construction.
Construction using prefabricated and modular buildings could achieve outstanding construction efficiency. For example, an apartment built in Melbourne employed modular construction methods and installed its nice-levels on-site in merely 5 days [58]. Similarly, another modular structure with eight storeys was built in 8 days [59]. By employed modular construction, a 25-storey building was completed in 27 weeks [60]. Zenga and Javor [61] carried out a study and found that when compared to the traditional construction method, the modular building method could reduce the building period to below one-third of the original project duration. Several other researchers also conducted their studies and reported the construction period of modular structures could lead to by 50–60% saving as compared to the traditional method [57,62].
2.2.2. Type and Materials
Modulars for building can be classified into the following two categories according to the load transfer mechanism: framed modules and self-supported modules. For framed modules, edge beams carried the imposed load to corner columns which need to be designed strongly enough [63]. In comparison, self-supported modules transfer imposed loads through the side walls, which therefore are constrained against wall buckling. Comparing to framed modules, self-supported modules could be cheaper and built fasters for low-rise structures [64]. Nevertheless, diaphragm action in walls for both types of modules is to provide horizontal load-resistance capacity against wind action [65,66].
The materials used in modular buildings generically have better quality since the structure or elements are prefabricated off-side in prefabrication warehouses. Timber, steel, and concrete are the predominate building materials for modular structures because of their high quality and economic features. The selection of materials primarily depends on building requirements and configurations. Normally, a variety of different construction materials are employed and used for modular structures, while precast façades (51%), precast staircases (22%), semi-precast slabs (9%), and semi-precast balconies (7%) are the most commonly used components in modular structures [67].
2.2.3. Applications
One of the tallest modular structures in the world is the Croydon in UK (as shown in Figure 2a, with 44- and 38-storey towers) [68]. The Life Cycle tower in Austria (Figure 2b) and the Puukuokka apartment in Finland (Figure 2c) are both timber structures that are 8-storeys high [69,70]. The world’s tallest steel modular structure currently is the B2 tower in New York (Figure 2d) [71].
2.2.4. Structural Performance
Hao and his co-workers [72] carried out an intensive review on the structural performance of modular structures. It was categorized into structural performance against wind, earthquakes, blasts, progressive collapse, and transportation-induced damages.
- Wind loading: tropical cyclones, typhoon, and tornadoes apply both high-amplitude wind loading and secondary windborne debris impact and water towards structures. Wind loadings are typically characterized by high amplitude and low frequencies pressures [73,74,75]. Design codes such as AS1170.2 are normally to examine the stability, strength, and serviceability by assessing the inter-storey drift, overall deflection, and vibration [76]. Until now, there have been very limited studies on the behavior of modular structures under the action of wind load in the open literature.
- Windborne debris impact has been reported by the majority of post-event investigations [77,78,79,80]. Windborne debris impact could result in localized damage to the structural façade, which may lead to a sudden increase of internal pressurization and thus structure collapse, or cause damage due to water ingress. Since modular structures generally are made of light-weight element/material, they are vulnerable to such debris impact. The development of light-weight structural and non-structural panels for resilient modular structures can be considered and incorporated in the design and development of modular buildings.
- Seismic action: Despite extensive research conducted on the behaviors of traditional buildings under earthquake loading, where displacement-based design, i.e., ductility ratio and inter-story drift ratio, which are used to measure structural performances [74]. Because of the obvious advantages such as light-weight, modular structures, they are popularly adopted in earthquake prone regions [81,82]. The performances of modular structures under earthquake loading are still not adequately investigated, thus more research is badly needed.
- Accidental and contempt blast and impact loading: blast and impact loading could lead to local and/or global structural responses. Localized failure could result in progressive collapse [83,84,85]. Global response could be triggered on structure with longer loading duration [86,87,88], such as far-field or gas explosion. Until now, there is a lack of qualitative and quantitative studies for blast loading for prefabricated and modular structures.
- Progressive collapse: when local failure due to an extreme event occurs, it could result in overloading and failure of alternate load paths, and thus a progressive collapse would be formed in a structure [89,90]. Progressive collapse mainly results because of the lack of continuity, ductility, and structural redundancy [89]. Since modular structures are primarily made of light-weight components which cannot withstand blast loading. The alternative load path method should be considered for analysis [91,92]. Field tests were reported on CONEX modules as shown in Figure 3 [93], which found progressive collapse was not resulted. Modular buildings thus may be more robust against progressive collapse because of the inter-modular connection. More studies could be carried out to further validate this perception.
- Transportation and handling: modular structures need to be delivered from the prefabrication warehouse to the site for assembly. The bulky character of modules is one of the primary constraints, which requires proper consideration for modular construction [72,94]. Transportation-induced component and structure damages have been studied, where it was found that the intensity of structure damages is strongly related to the roughness of road surface [95,96]. To mitigate transportation-induced damages, vibration absorbers or devices can be used to minimize damage due to vibration [97]. There are limited studies and results available in the open literature.
2.2.5. Challenges
- Design guide: a reliable design guide or recommended practice for prefabricated and modular structures is very important for the wide application of prefabricated and modular structures [98]. Singleton and Hutchinson [99] pointed out that asset owners and investors do not favor modular structures since the prefabricated components would often not satisfy building requirements, while most of them deteriorate fast and cannot meet the durability requirement. Furthermore, on-site installation and assembling requires very high accuracy of product and sophisticated assembly details [63]. In general, there is a serious lack of design guides for prefabricated and modular structures, which are currently still largely reliant on conventional design guides for traditional buildings [100].
- Hazard resistance: as reviewed above, in general there is a lack of comprehensive study about the response and performance of prefabricated and modular structures, and no mitigation retrofit is available either.
- Transportation, lifting, and connection: there is a lack of guideline and performance data on the transportation, lifting and installation of prefabricated and modular structures. A common design guide or recommended practice only recognizes the potential threats and consequence, and therefore suggests to conduct these activities with “extra care”. For instance, during lifting, ASTM suggests to lift the structures at as low a speed as possible due to the dynamic effect. However, no quantitative information is provided.
- Cost: the capital demand for prefabricated and modular construction is generally very high. It is estimated that about 30–70% higher overall cost is expected for prefabricated and modular construction compared to conventional construction [101]. In the UK, it generally costs about 7–10% higher [48,102]. For instance, L&G spent 55 million pounds to set up a modular fabrication factory, and Laing O’Rourke invested 104 million pounds on prefabrication facilities [103].
- Construction automation and intelligence: despite the above advantages of prefabricated and modular construction, currently the on-site erection is still very much based on the conventional crane with coordination of site personnel. The overall onsite labor requirement is still high, with numerous complaints about technical difficulties such as being hard to connect and install, mis-installation, etc. The future target of intelligent automated installation is far from final achievement.
2.3. Miscellaneous
Different concept and structures are also available which could be viable for automated and intelligent building and constructions. The foldable structure is briefly reviewed herein.
Foldable Structures
A deployable structural system inherits the features of prefabricated and modular structures, and integrates it further with automatic, semi-automatic, or manual mechanisms to deploy the prefabricated components into an entire building. An Italian architect designed and built a foldable structure which was prefabricated and transported to site, and managed to be built by contractors within 6 h [104] (Figure 4a). Ten Fold Engineering developed a self-deploying structure that can unfold automatically without the need for foundations and builders (Figure 4b).
Studies on foldable structures originated from 1990s when the scissor link for deployable structures began to be investigated [105]. Optimized links and mechanism for deployable structures have been studied [106]. In the meantime, functional materials/structures such as origami materials/origami-based blocks have been investigated in the area of construction material which can be applied for foldable structures [107,108,109,110].
Overall, foldable structures are still in their infancy, where most current progress is still research-based or a preliminary engineering trial.


3. Automation Construction
3.1. Introduction
The construction industry has been evolving for the past decades to better satisfy the market requirements, such as meeting cost-effective construction, safety concerns, labor shortage, standard quality, etc. With the development in robotic technology, argument intelligence, and remote control technology, the construction industry is also advancing with cutting-edge technology to achieve intelligent construction automation. As reviewed in the above section, new structural forms such as prefabricated and modular structures are developing fast and becoming more and more accepted by the construction industry [113], which not only reduces material waste, but also maintains the quality, increases cost-effectiveness during the construction process; most structural components are mass produced in warehouses with standard dimensions at high accuracy [114,115]. This enables the implementation of construction automation with robotic technology in the construction process. Overall, the construction automation system can reduce labor costs and labor demand (currently, construction is still labor intensive) [116]. The robotic system can also work in extreme environments, such as extreme weather, radiative area, war zone, high seismic region, and even space environment. It also thoroughly improves the site safety condition.
3.2. Type and Application
Development of construction automation focusing on robotic construction is reviewed in this section. It is categorized with structural forms.
3.2.1. Steel Structure Construction
Steel structure is widely used for construction especially for high-rise buildings. Construction robotics for steel structure can be summarized in the following three types: Robotic Beam Assembly; Robotic Assembly System; and Welding robotics.
Robotic Beam Assembly (RBA)
Cai et al. [117] summarized the robotic construction system for high-rise steel-frame buildings. In 2008, an overall concept was introduced by Lee et al. [118] to optimize the steel-frame bolting process by using an automation system. Jung et al. [119,120] proposed and further developed the robotic beam assembly system (RBA). In 2010, the prototypes of RBA were developed and tested by Chu et al. [121] as shown in Figure 5a [122]. The system includes an end-effector for bolting operation, a robotic manipulator, and a cabin control station. The bolting process was done by a robot supervised by workers in the cabin, which also improved both working efficiency and safety on site.
Robotic Assembly System (RAS)
In 1995, Wakisaka developed an automated high-rise building automation system, named Big Canopy, including synchronously climbing an all-weather temporary roof, a parallel material supply crane ahead, prefabricated construction material, and a material management system linked with CAD as shown in Figure 5b [123]. The system was proved more efficient than the conventional construction process at that time. The workers on site also experienced a better working condition under the temporary roof. This assembling concept was also widely accepted in the current assembling automation design.
Welding Robots
Chea et al. [124] summarized the welding robot system, i.e., Arc-welding robot system and Mobile welding robot, that have been developed in past decades [125,126]. The Arc-welding robot system as shown in Figure 6a can trace the seam by using real-time visual measurements, and the robotic arm can provide the desired degree of freedom. The mobile welding robot can calibrate inaccuracies on flat surfaces during its operation. It is also described by Balaguer and Abderrahim [127] that the mobile welding robot can be deployed and reduces the work force up to 70%. Though it has a higher operation cost, the saved time on construction can balance the operation cost and early return of investment for clients. It is also mentioned by Ardiny [128] that the welding robot can also be attached on the bridge and welding/moving from the ends to middle part of the bridge as shown in Figure 6b.
3.2.2. Concrete Structures
3D Printing Concrete
A detailed review for 3D printing concrete is provided in Section 2. Different robotics have been developed to meet the demand for the detailed process of concrete printing. As shown in Figure 7, the printing head can be installed on either gantry or be frame-mounted, and the printing head can comprises of a single nozzle or multiple nozzles together with a binder supply pipe [129]. The binder material can be supplied through the premixed binder or through a mixing container, which mixes the binder on-site [34,130]. The construction convenience, easy maintenance, and cost efficiency of the 3D printing makes it a solution for the labor shortage and cost. However, the 3D printing robot needs a specific binder formula to achieve early strength and low shrinkage. 3D printing concrete is currently one of the most promising construction automation concepts which can be integrated to form construction intelligence.
Rebar Tying Robot
In the construction of conventional reinforced concrete, the preparation of rebar is a complex and tedious, but important process. Some rebar tying robotic systems have been developed. The rebar tying robot as knows as Tybot was developed, which could be used by steel reinforcement suppliers to minimize the labor cost and enhance the safety issue during the work. As shown in Figure 8a–c, the robotic arms can position and tie the reinforcements into cages with uniformed quality [131]. The contractors also invented the robot that only focused on tying the rebars in both the manufacturing line and on construction site [132]. In 2020, a drone attached to the rebar tying device was invented and patented in the US, which further extended the application of the rebar tying robot in the construction industry [133].
Surface Treatment
The concrete detailing is another complex and tedious work in the construction of reinforced concrete structures. Concrete detailing robots have been developed which can work on compacting and surface finishing with minor supervision [127,134]. For example, as shown in Figure 8c, the compact robot developed by Takenaka can automatically compact the concrete with two rotary floats. The concrete finish robot developed by Kajima and Shimizu can be used to perform surface finishing work to minimize labor demand. Such robots can be part of an integrated intelligent construction system.
3.2.3. Glass Windows and Façade
Glass windows and façade installation is regarded as one of the most complex processes in construction, which in the meantime also requires very high accuracy. Some glass windows/façade installation robots have therefore been invented. As shown in Figure 8d, an indoor façade installation robot was invented which used a mini excavator attaching a 3-DOF robotic manipulator when installing the glass windows [135,136]. There were also robots that can stand along by themselves and install the heavy façade walls, replacing labor costs [134]. The performance and efficiency has been verified in field tests with only half number of workers on-site as compared to the conventional work procedure [136].
3.2.4. Masonry Construction
The masonry structure is one of the oldest but most popular structure particularly for low-rise buildings. However, the construction of the brick structure requires a large amount of skilled brick layers, and the quality of brick structures is dependent on the quality of the brick layer. In recent years, some brick laying robotics have been developed primarily for the residential construction area. Helm et al. [137] proposed a mobile brick layer robot, which has a convenience size passing through the doorway and a flexible vacuum device positioning the bricks. SAM 100 (Figure 9a developed by the US company Construction Robotics and Hadrian X (Figure 9b) by Australian company Fastbrick Robotics are two of the prototypes available in the market. The robot following the programmed route, such as a 2D plan [138], can significantly increase the productivity and reduce the cost as compared to conventional labor work [139]. Hadrian X includes a transmitting track supplying the brick and the robot arm would position the brick onto scheduled position. The traditional brick layer robot all has a heavy base on the ground or attached on the brick supply vehicle. To make the robot more intelligent, each brick to be laid is numbered, and pre-cut for utility pipe and cavity before laid.
3.2.5. Universal Application Robot
The development of the construction robotic system is not constrained to an automation system but also extends to equip the construction worker with a robotic skeleton so as to improve their efficiency and competence while utilizing human intelligence. The exoskeleton was initially designed to protect the workers’ body joints against long repetitive work [142]. It was proved to be able to enhance the strength of human beings and increase the working capacity without costing extra efforts. As shown in Figure 10, the system is generally made up of several wearable connected devices on the body. The joint angles such as bending angle and shoulder twisting angle were much improved after wearing the exoskeleton, which helped to protect the construction worker [143]. The building construction industry may benefit from its benefits by enhancing the working capacity of workers. However, due to the limited development on the exoskeleton device, it still cannot replace the conventional working/equipment on site or generate remarkable cost-effective solutions.
3.3. Potentials and Challenges
There are great demands and incentives to develop an intelligent automation system in the construction industry in forecast to the future labor shortage, skilled construction worker shortage, safety restrictions and compensation increment, and harsh work enviroments [145]. Besides, the automation can also guarentee the quality and cost-effectiveness of the building structure, especially for the high repetitetive work processes. The implentation of the construction automation system with prefabricated and modular structures could lead to an averaged reduction of 15% for construction time, 65% for construction waste, and 16% for labor requirement, as well as over 60% less health and safety incidents [146]. Pan conducted some investigations and workshops among the contractor, property developer, academia, government agencies, architects, consultants and clients in the Hong Kong construction sector [147]. For the automation requirements in the construction industry, it was found that the priority automation requirement are the automatic framework, 3D printing of framework, hoist/positioning the structural elements, and the automated welding vertically and horizontally on element connections. As show in Figure 11 [147], for construction automation, the most focused issues are the safety and adoptable design. The welding work focused on the labour shortage and quality of the work. All the exterior work mentioned the safety as the major concern for current conventional constructions.
The challenges and limitations of current construction automation are obvious. Since the conventional construction has been well developed for past decades, enormous resistances could be expected from the conventional construction section. The existing robots are relatively large and expensive, and so might not be able to operate on all types of construction sites [138]. The high initial cost of robots and the unfamiliar quality of new structural forms may also stopped the client using such technology. Besides, the low R&D budgets in the related sector and the industry resistance to adopt new construction procedures may also constrain the automation development [148]. It has also been found that most of the robots are not fully autonomous, which requires intensive manual preparation, and the robots system can only work within pre-designed boundaries [149]. The single task robots cannot be well cooperated with the automation system under the current complicated construction enviroments, which also challenges the whole construction process [113]. Besides, for most of the robot arms, the power cable restained its operation distances and limited its working efficiency [149]. There have been many advancements in the area of construction automation, however, there is still much distance to cover to achieve intelligent construction, which requires a multi-discipline collaboration including structure engineering, mechanical engineering, mechatronic engineering, electronic and control engineering, and computer science and intelligence.
4. Construction Monitoring, Sensing Technology, and Data Processing
Structure monitoring is an important component in intelligent construction, which provides real-time or periodic structural performance and conditions that can be used for decision making in planning, construction, inspection, and maintenance. In this section, monitoring and tracing methods that have been employed in broad construction processes is summarized. Data acquisition technology, data processing technology are briefly reviewed, which are followed by potentials and challenges.
4.1. Monitoring and Tracing in Construction
The development of information, sensing, and control technology has boosted the application of monitoring into the entire process of manufacturing. As shown in Figure 12 the entire construction process, including planning and design, structural element manufacturing, site construction, and management, are all digitalized and monitored by an entire system. It enables an effective and efficient supervision on each construction process and adjusts the unexpected delay to manage a healthy construction loop.
From a system management point of view, the monitoring process can be categorized into two sub-groups, i.e., data acquisition/matching between the captured signal and model; and result visualization/analysis on the desktop screen [151]. During the data acquisition and matching, which generally needs massive data input to track the manufacturing of each structural elements. The digital ID of each component is cooperated and tracked, such as the QR code (i.e., Quick Response code) and RFID (i.e., Radio Frequency Identification). The printed QR code can provide a link demonstrating its relevant files such as 3D model and technical design drawings [152]. The data can be transmitted to the cloud identifying the prefabricated elements. The RFID was a more popular and practical solution in the existing prefabricated building site [151], and it was also widely accepted for inspection and on-site data retrieving purposes [153,154]. The inspector can retrieve data from the RFID tag on the prefabricated elements through a wide selection of devices such as cellphones and laptops. Valero and Adan [155] reviewed and summarized the RFID integration system in the construction sector and concluded that the RFID tag has light, small, and wearable characteristics. There is no need to scan with a direct view of the tag, as positioning the receiver in a designed distance can easily capture the elements. The retrieved data can also be transmitted into the BIM model, from where the work schedule can be matched and supervised [156]. Ergen et al. [157] employed the GPS and RFID tag together to better locate and track the precast elements in storage as shown in Figure 13a. a. With UAV (i.e., Unmanned Aerial Vehicle) applied in engineering consulting companies, it has also been used with RFID to identify the prefabricated elements. The flow chart as shown in Figure 13b. b demonstrated the UAV with the RFID receiver was deployed to better capture the RFID signal on prefabricated elements instead of the traditional hand-hold electrical receiver device [158].
The data of structural components from mass manufacturing warehouses to sites can also be captured through a laser scanning method, which can give the detailed 3D coordinates and is matched with the 3D model [151]. In engineering practice, the battery-powered laser scanner requires intensive care/maintenances, mild working conditions, and intensive user training. Besides, the noise data can easily generate and influence the results by the environment or by users. With the expensive cost of the device, regular calibration, long warming up time, etc. [151,159,160] this tracing method might not currently be suitable for wide application.
Digital images and videos also have been used as additional methods to provide onsite information regarding the construction progress due to its flexible and economic cost characteristics [161]. The captured photo and video can be input through the computer after identifying the texture, color, and shape of the prefabricated element, and the retrieved data would be sent for the construction progress measuring [162,163,164]. The 3D model is then built through the captured digital image. In engineering practice, the related information on structural components cannot be effectively linked and updated in real-time for most site workers and engineers.
4.2. Data Acquisition and Sensing Systems
4.2.1. Accelerometer Systems
Accelerometer transducer with model analysis has been considered as one of the most commonly used methods for the structural condition assessment [165,166,167,168]. When structures are excited by input excitation (installed shake, hammer) or environmental load (wind, earthquake), structural dynamic responses are measured by deployed accelerometers. Acceleration data collected from dynamic tests can be used to conduct a model analysis and to obtain structural dynamic properties, including vibration amplitude, nature frequency, damping ratio, mode shape, etc. The in situ structural dynamic parameters can be further compared with those which are computed from the established finite element model. Structural stiffness deduction or local damage information can be derived by using various structural health monitoring algorithms and computer-assisted methods.
4.2.2. Fiber Optic Sensor and Strain Measurement
Fiber optic sensors, particularly fiber Bragg grating (FBG) has received much attention in many field applications of structural health monitoring projects [169,170,171,172,173], i.e., Figure 14. Compared with electrical sensors, FBG sensors have several advantages such as quick response, non-conductivity, light weight, corrosion resistance, and electromagnetic noise immunity. The main working principle of FBG sensors is when light passes along the fiber length it will cause narrowband reflection light. The reflected wavelength, i.e., Bragg wavelength, can be monitored. The Bragg wavelength linearly varies with the change of strain and temperature, so that the FBG sensor can effectively monitor structural local strain and temperature. In addition, distributed FBG sensors can be easily deployed in one single fiber length, which significantly expands the possibilities of using this method for large-scale civil infrastructure health monitoring [174,175,176,177].
4.2.3. GPS and Positioning System
The global positioning system (GPS) is capable of obtaining continuous displacement and deformation monitoring for large-scale civil structures, which has been implemented for structural monitoring since the 1990s [178,179,180]. The GPS system normally consists of space segment, user segment, and control segment. This technology functions like a wire-free communication system between satellites and installed GPS nodes, which show unique superiority to provide structural static and dynamic structural responses and global position information in near real-time for health monitoring of large-scale civil structures. In the past few years, with the achievements of error analysis and signal processing technology, the measurement accuracy by using the GPS positioning system has been significantly improved [181,182,183,184].
4.2.4. Piezoelectric Sensing
Piezoelectric sensors (i.e., Figure 15) have been increasingly employed in many civil engineering fields because of their compact size, low-cost, fast response, and wide bandwidth [185,186,187,188,189,190]. Piezoelectric material exhibits piezoelectricity, which makes piezoelectric sensors suitable as both actuators and sensors. Currently, there are two popular piezoelectric-based structural health monitoring methods; wave-based damage detection and impedance-based damage profiling [187]. For the wave-based damage detection method, piezoelectric sensors are used as both actuators and sensors to generate and receive detecting waves. Based on the reflection wave from the damage point or wave propagation characteristics when passing through a damaged interface, structural damage could be detected. The other method is impedance-based damage profiling. When piezoelectric transducers are mounted on structures, piezo-impedance signature is changed with local damage condition. By analyzing the impedance signature measured from piezoelectric sensors, structural local damage can be detected and quantified.
4.2.5. Camera and Vision-Based Sensing
With the development of machine learning technology, vision-based health monitoring of structures has attracted wide attention [191,192,193], i.e., Figure 16. At the current stage, there are two major research aspects for vision-based approaches; one is using camera-collected videos to obtain the structural dynamic response [194,195,196]. Compared with traditional acceleration sensors or other structure-mounted sensors, this method provides a non-contact solution to capture structural dynamic data and obtain the structural health condition. Machine learning algorithms is then employed to extract damage information from image data [197,198,199,200]. This method uses a variety of statistical features of images to implement detection, classification, regression, etc. The other method is to use laser doppler vibrometry (LDV). A source of acoustic motion could cause change in sound wavelength which can be used to measure surface motion. The LDV method does not require a high-energy interferometer, and is also well-established in modal analysis [201,202,203].
4.3. Data Processing and Visualization
In structural health monitoring, feature extraction using signal processing technic is one of the primary challenges. To accentuate features from recorded data using the above methods and sensors is the primary goal. Using a suitable signal processing method is paramount to effectively identify structural defects for decision making towards action. Goyal and Pabla [165] summarized five levels of aims for data processing as follows:
- A: Identifying structural damage
- B: Determining damage location
- C: Quantifying damage severity
- D: Predicting structure remaining service life
- E: Self-healing
Conventional data processing methods for structural health monitoring include the following: probability distribution and density function; a statistical time series model; FFT (fast fourier transform); STFT (short-time fourier transform); Wavelet Transform; Cohen’s class; Cepstrum analysis; PSD (power spectral density); and HHT (Hilbert–Huang transform). These approaches for data processing are confronted with environmental noise, computational complexity, and volume of measurement data. Recently, with the rapid progress of computing power and image acquisition technology, new data processing approaches such as deep learning offers new channels for excavating massive data towards accurate, robust, and autonomous analysis of the data.
Deep Learning
Deep learning is a representational learning method, which enables a network architecture to autonomously learn highly abstract features from raw data to fulfill recognition or classification tasks which belongs to machine learning methods as part of Artificial Intelligence [205]. The development of deep learning evolved from artificial neural networks [206] to convolutional neural networks [207]. Researchers at UC Berkeley developed Caffe as a framework of deep learning tools in 2013 [208]. Different tools for deep learning were then introduced [209,210]. Many studies and successful applications have since been employed in SHM of structures for crack and damage detection on bridges [211] (such as Figure 17), tunnels [212], railways and highways [213,214], RC or steel buildings [215,216], and pipelines.
4.4. Challenges
The existing challenges for sensor and data processing could include the following:
- Durability monitoring: structural performance would deteriorate over its service time, which as a result could lead to reduced structural safety. Aging, corrosion, acid attack, freeze-thaw, and alkali-aggregate reaction etc. could also result in structural deterioration. The damage related to the durability of structures may be due to the above. It is still a challenge for existing sensors for accurate monitoring.
- Senor durability: the design life of sensors is normally between five to ten years, which is much shorter than the design life of most structures. Durability and the replacement of sensors, especially those embedded in structures, impose a practical challenge.
- High performance hardware: a decent amount of data is needed for processing methods such as deep learning. Large volumes for data storage are therefore required. Additionally, to implement data processing and training, high performance GPU, CPU, and memory are also required for efficient and real-time detection.
- Cost and maintenance: normally, hundreds of sensors together with a robust acquisition system is needed for the monitoring of structures. The cost and maintenance of sensors and the entire system is a practical challenge for their application into structures.
- Data sufficiency and over-fitting: generally, a sufficient data pool is required for deep learning-based data processing methods. A large amount of data collecting, filtering, and correction work is needed. In the meantime, over-fitting with data which does not reflect the real conditions will also complicate the training outcome.
- Data compressive technology: the large number of sensors in a structure generates a substantial amount of data. Data compression with a high compressive efficiency and decompression technology with a good reproducing capacity is required.
- Interpretability: the process of deep learning is often described as a “black box”, meaning there is a lack of theoretical background. Proper verification and validation is needed when implementing deep learning-based data processing methods for SHM.
5. Conclusions
This paper reviews current research and development in intelligent construction focusing on: (a) new structural forms, which are innovative and with potential, or which are being applied to automated and mass manufacturing/construction; (b) automated and intelligent construction systems; and (c) advanced structure sensing and monitoring technology. They do not compromise the entire aspects for intelligent construction, but they are no doubt the core elements for intelligent construction towards a future building system.
New structural forms including 3D printing technology, prefabrication and module construction, technology, and a foldable structure, could possibly be employed for automatic construction. Different materials could improve the construction efficiency and functionality. The structural performances are also reviewed under both conventional loading and extreme hazards such as earthquakes, cyclones, blasts, and impact loadings. The challenges of these structural forms are discussed as well.
Despite the fast development of AI and robotic technology, the application into construction is limited. Current automation systems only apply to steel structure for assembling and welding, to concrete structures for 3D printing, rebar tying, and surface treatment, to masonry structure for brick laying, and miscellaneous. Despite the high efficiency, most existing construction automation applications are semi-auto and require much human interaction. This is partially due to the complex site environment, as well as the very complex construction procedures. The detailed challenges and potentials are reviewed.
Last but not the least, structure monitoring is an important component in intelligent construction, which provides real-time or periodic structural performance and conditions that can be used for decision making in planning, construction, inspection, and maintenance. Monitoring and tracing methods that have been employed in broad construction processes is summarized. Data acquisition technology and data processing technology are briefly reviewed, followed by potentials and challenges.
Author Contributions
Conceptualization, Q.M., X.Z.; methodology, Q.K.; formal analysis, K.L.; writing—original draft preparation, Q.M., Q.K.; supervision—X.Z.; funding acquisition—X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Australian Research Council, grant number DE210100986.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Courtney, R.; Winch, G. CIB Strategy for Re-Engineering Construction. 2002. Available online: http://cibworld.xs4all.nl/dl/priority_themes/Proposal.pdf (accessed on 1 January 2021).
- Bowden, S.; Dorr, A.; Thorpe, T.; Anumba, C. Mobile ICT support for construction process improvement. Autom. Constr. 2006, 15, 664–676. [Google Scholar] [CrossRef]
- European Commission. Industrialised, Integrated, Intelligent Construction. Available online: https://cordis.europa.eu/project/id/26771 (accessed on 20 October 2011).
- Irani, Z.; Kamal, M.M. Intelligent systems research in the construction industry. Expert Syst. Appl. 2014, 41, 934–950. [Google Scholar] [CrossRef] [Green Version]
- The University of Melbourne. $28 Million Grant to Transform Design and Production of Buildings in Australia. Available online: https://about.unimelb.edu.au/newsroom/news/2020/march/$28-million-grant-to-transform-design-and-production-of-buildings-in-australia (accessed on 5 February 2020).
- Purdue University. The AutoIC Lab Develops and Leverages Advanced Technologies to Support Construction Engineering and Management, Construction Automation, and Sustainable Infrastructure, Including Building Information Modeling (BIM), Natural Language Processing (NLP), Artificial Intelligence (AI), Virtual Reality (VR), and Construction Robotics. Available online: https://polytechnic.purdue.edu/autoic-lab (accessed on 12 March 2020).
- Zhang, J.; Wang, J.; Dong, S.; Yu, X.; Han, B. A review of the current progress and application of 3D printed concrete. Compos. Part A Appl. Sci. Manuf. 2019, 125, 105533. [Google Scholar] [CrossRef]
- Ngo, T.D.; Kashani, A.; Imbalzano, G.; Nguyen, K.T.; Hui, D. Additive manufacturing (3D printing): A review of materials, methods, applications and challenges. Compos. Part B Eng. 2018, 143, 172–196. [Google Scholar] [CrossRef]
- Ligon, S.C.; Liska, R.; Stampfl, J.; Gurr, M.; Mulhaupt, R. Polymers for 3D printing and customized additive manufacturing. Chem. Rev. 2017, 117, 10212–10290. [Google Scholar] [CrossRef] [Green Version]
- Melchels, F.P.; Feijen, J.; Grijpma, D.W. A review on stereolithography and its applications in biomedical engineering. Biomaterials 2010, 31, 6121–6130. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, O.A.; Masood, S.H.; Bhowmik, J.L. Optimization of fused deposition modeling process parameters: A review of current research and future prospects. Adv. Manuf. 2015, 3, 42–53. [Google Scholar] [CrossRef]
- Sood, A.K.; Ohdar, R.K.; Mahapatra, S.S. Parametric appraisal of mechanical property of fused deposition modelling processed parts. Mater. Des. 2010, 31, 287–295. [Google Scholar] [CrossRef]
- Yap, C.Y.; Chua, C.K.; Dong, Z.L.; Liu, Z.H.; Zhang, D.Q.; Loh, L.E.; Sing, S.L. Review of selective laser melting: Materials and applications. Appl. Phys. Rev. 2015, 2, 041101. [Google Scholar] [CrossRef]
- Utela, B.; Storti, D.; Anderson, R.; Ganter, M. A review of process development steps for new material systems in three dimensional printing (3DP). J. Manuf. Process. 2008, 10, 96–104. [Google Scholar] [CrossRef]
- Mueller, B. Additive manufacturing technologies–Rapid prototyping to direct digital manufacturing. Assem. Autom. 2012, 32. [Google Scholar] [CrossRef]
- Khoshnevis, B. Automated construction by contour crafting—Related robotics and information technologies. Autom. Constr. 2004, 13, 5–19. [Google Scholar] [CrossRef]
- Mills, C. The design of concrete structures to resist explosions and weapon effects. In Proceedings of the 1st International Conference on Concrete for Hazard Protections, Edinburgh, UK, 27–30 September 1987; pp. 61–73. [Google Scholar]
- Perrot, A.; Rangeard, D.; Pierre, A. Structural built-up of cement-based materials used for 3D-printing extrusion techniques. Mater. Struct. 2016, 49, 1213–1220. [Google Scholar] [CrossRef]
- Kazemian, A.; Yuan, X.; Cochran, E.; Khoshnevis, B. Cementitious materials for construction-scale 3D printing: Laboratory testing of fresh printing mixture. Constr. Build. Mater. 2017, 145, 639–647. [Google Scholar] [CrossRef]
- Gosselin, C.; Duballet, R.; Roux, P.; Gaudillière, N.; Dirrenberger, J.; Morel, P. Large-scale 3D printing of ultra-high performance concrete–a new processing route for architects and builders. Mater. Des. 2016, 100, 102–109. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Wu, X.; Yang, W.; Zhao, R.; Qiao, L. The influence of fine aggregates on the 3D printing performance. MSE 2018, 292, 012079. [Google Scholar] [CrossRef]
- Hambach, M.; Rutzen, M.; Volkmer, D. Properties of 3D-printed fiber-reinforced Portland cement paste. In 3D Concrete Printing Technology; Elsevier: Amsterdam, The Netherlands, 2019; pp. 73–113. [Google Scholar]
- Soltan, D.G.; Li, V.C. A self-reinforced cementitious composite for building-scale 3D printing. Cem. Concr. Compos. 2018, 90, 1–13. [Google Scholar] [CrossRef]
- Xia, M.; Sanjayan, J. Method of formulating geopolymer for 3D printing for construction applications. Mater. Des. 2016, 110, 382–390. [Google Scholar] [CrossRef]
- Hao, Y.; Hao, H.; Shi, Y.; Wang, Z.; Zong, R. Field testing of fence type blast wall for blast load mitigation. Int. J. Struct. Stab. Dyn. 2017, 17, 1750099. [Google Scholar] [CrossRef]
- Zareiyan, B.; Khoshnevis, B. Interlayer adhesion and strength of structures in Contour Crafting-Effects of aggregate size, extrusion rate, and layer thickness. Autom. Constr. 2017, 81, 112–121. [Google Scholar] [CrossRef]
- Le, T.T.; Austin, S.A.; Lim, S.; Buswell, R.A.; Law, R.; Gibb, A.G.; Thorpe, T. Hardened properties of high-performance printing concrete. Cem. Concr. Res. 2012, 42, 558–566. [Google Scholar] [CrossRef] [Green Version]
- Panda, B.; Paul, S.C.; Mohamed, N.A.N.; Tay, Y.W.D.; Tan, M.J. Measurement of tensile bond strength of 3D printed geopolymer mortar. Measurement 2018, 113, 108–116. [Google Scholar] [CrossRef]
- Baker, W.E.; Cox, P.; Kulesz, J.; Strehlow, R.; Westine, P. Explosion Hazards and Evaluation; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Kingery, C.N.; Bulmash, G. Airblast Parameters from TNT Spherical Air Burst and Hemispherical Surface Burst; Report; US Army Armament and Development Center, Ballistic Research Laboratory: Picatinny Arsenal, NJ, USA, 1984. [Google Scholar]
- Lim, S.; Buswell, R.A.; Le, T.T.; Austin, S.A.; Gibb, A.G.; Thorpe, T. Developments in construction-scale additive manufacturing processes. Autom. Constr. 2012, 21, 262–268. [Google Scholar] [CrossRef] [Green Version]
- Nadal, A.; Pavón, J.; Liébana, O. 3D printing for construction: A procedural and material-based approach. Inf. De La Construcción 2017, 69, e193. [Google Scholar] [CrossRef]
- Hack, N.; Lauer, W.V. Mesh-Mould: Robotically Fabricated Spatial Meshes as Reinforced Concrete Formwork. Archit. Des. 2014, 84, 44–53. [Google Scholar] [CrossRef]
- Tay, Y.W.D.; Panda, B.; Paul, S.C.; Noor Mohamed, N.A.; Tan, M.J.; Leong, K.F. 3D printing trends in building and construction industry: A review. Virtual Phys. Prototyp. 2017, 12, 261–276. [Google Scholar] [CrossRef]
- Yeon, J.; Kang, J.; Yan, W. Spall damage repair using 3D printing technology. Autom. Constr. 2018, 89, 266–274. [Google Scholar] [CrossRef]
- Xu, J.; Ding, L.; Love, P.E. Digital reproduction of historical building ornamental components: From 3D scanning to 3D printing. Autom. Constr. 2017, 76, 85–96. [Google Scholar] [CrossRef]
- Hao, H.; Stewart, M.G.; Li, Z.-X.; Shi, Y. RC column failure probabilities to blast loads. Int. J. Prot. Struct. 2010, 1, 571–591. [Google Scholar] [CrossRef]
- Werkheiser, M.J.; Fiske, M.; Edmunson, J.; Khoshnevis, B. On the development of additive construction technologies for application to development of lunar/martian surface structures using in-situ materials. In Proceedings of the AIAA SPACE 2015 Conference and Exposition, Pasadena, CA, USA, 31 August–2 September 2015; p. 4451. [Google Scholar]
- Ahn, B.Y.; Shoji, D.; Hansen, C.J.; Hong, E.; Dunand, D.C.; Lewis, J.A. Printed origami structures. Adv. Mater. 2010, 22, 2251–2254. [Google Scholar] [CrossRef]
- Tan, K.T.; Huang, H.; Sun, C. Blast-wave impact mitigation using negative effective mass density concept of elastic metamaterials. Int. J. Impact Eng. 2014, 64, 20–29. [Google Scholar] [CrossRef]
- Chen, H.; Barnhart, M.; Chen, Y.; Huang, G. Elastic Metamaterials for Blast Wave Impact Mitigation. In Blast Mitigation Strategies in Marine Composite and Sandwich Structures; Springer: Berlin/Heidelberg, Germany, 2018; pp. 357–375. [Google Scholar]
- Liu, Y.; Hu, H. A review on auxetic structures and polymeric materials. Sci. Res. Essays 2010, 5, 1052–1063. [Google Scholar]
- Imbalzano, G.; Tran, P.; Ngo, T.D.; Lee, P.V. A numerical study of auxetic composite panels under blast loadings. Compos. Struct. 2016, 135, 339–352. [Google Scholar] [CrossRef]
- San Ha, N.; Lu, G. A review of recent research on bio-inspired structures and materials for energy absorption applications. Compos. Part B Eng. 2020, 181, 107496. [Google Scholar]
- De Schutter, G.; Lesage, K.; Mechtcherine, V.; Nerella, V.N.; Habert, G.; Agusti-Juan, I. Vision of 3D printing with concrete—Technical, economic and environmental potentials. Cem. Concr. Res. 2018, 112, 25–36. [Google Scholar] [CrossRef]
- Kasperzyk, C.; Kim, M.-K.; Brilakis, I. Automated re-prefabrication system for buildings using robotics. Autom. Constr. 2017, 83, 184–195. [Google Scholar] [CrossRef] [Green Version]
- Badir, Y.F.; Kadir, M.A.; Hashim, A.H. Industrialized building systems construction in Malaysia. J. Archit. Eng. 2002, 8, 19–23. [Google Scholar] [CrossRef]
- Boyd, N.; Khalfan, M.M.; Maqsood, T. Off-Site Construction of Apartment Buildings. J. Archit. Eng. 2013, 19, 51–57. [Google Scholar] [CrossRef]
- Rogan, A.L.; Lawson, R.M.; Bates-Brkljac, N. Value and Benefits Assessment of Modular Construction; Steel Construction Institute: Ascot, UK, 2000. [Google Scholar]
- Annan, C.D.; Youssef, M.A.; El-Naggar, M.H. Effect of directly welded stringer-to-beam connections on the analysis and design of modular steel building floors. Adv. Struct. Eng. 2009, 12, 373–383. [Google Scholar] [CrossRef]
- Shi, T.; Zhang, X.; Hao, H.; Chen, C. Experimental and numerical investigation on the compressive properties of interlocking blocks. Eng. Struct. 2021, 228, 111561. [Google Scholar] [CrossRef]
- Shi, T.; Zhang, X.; Hao, H.; Xie, G. Experimental and numerical studies of the shear resistance capacities of interlocking blocks. J. Build. Eng. 2021, 44, 103230. [Google Scholar]
- Xie, G.; Zhang, X.; Hao, H.; Bi, K.; Lin, Y. Response of reinforced mortar-less interlocking brick wall under seismic loading. Bull. Earthq. Eng. 2022, 20, 6129–6165. [Google Scholar]
- Pons, O. Assessing the sustainability of prefabricated buildings. In Eco-Efficient Construction and Building Materials; Elsevier: Amsterdam, The Netherlands, 2014; pp. 434–456. [Google Scholar]
- Tam, V.W.; Gao, X.; Tam, C.M.; Chan, C. New approach in measuring water absorption of recycled aggregates. Constr. Build. Mater. 2008, 22, 364–369. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.-h.; Kim, K.-w.; Lim, S.-h. Improvement of floor impact sound on modular housing for sustainable building. Renew. Sustain. Energy Rev. 2014, 29, 263–275. [Google Scholar]
- Lawson, R.M.; Ogden, R.G.; Bergin, R. Application of modular construction in high-rise buildings. J. Archit. Eng. 2012, 18, 148–154. [Google Scholar]
- Boafo, F.E.; Kim, J.-H.; Kim, J.-T. Performance of modular prefabricated architecture: Case study-based review and future pathways. Sustainability 2016, 8, 558. [Google Scholar] [CrossRef]
- Gunawardena, T. Behaviour of Prefabricated Modular Buildings Subjected to Lateral Loads. Ph.D. Thesis, The Univeristy of Melbourne, Parkville, VIC, Australia, 2016. [Google Scholar]
- Gunawardena, T.; Tuan, N.; Mendis, P.; Aye, L.; Crawford, R. Time-efficient post-disaster housing reconstruction with prefabricated modular structures. J. Pap. Open House Int. 2014, 39, 59–69. [Google Scholar] [CrossRef]
- Zenga, M.; Javor, A. Modular Homes: The Future Has Arrived; Cronos Books: Pitești, Romania, 2008. [Google Scholar]
- Kamali, M.; Hewage, K. Life cycle performance of modular buildings: A critical review. Renew. Sustain. Energy Rev. 2016, 62, 1171–1183. [Google Scholar] [CrossRef]
- Lawson, R.M.; Richards, J. Modular design for high-rise buildings. Proc. Inst. Civ. Eng.-Struct. Build. 2010, 163, 151–164. [Google Scholar]
- Thanoon, W.A.; Jaafar, M.S.; Kadir, M.R.A.; Ali, A.A.A.; Trikha, D.; Najm, A.M. Development of an innovative interlocking load bearing hollow block system in Malaysia. Constr. Build. Mater. 2004, 18, 445–454. [Google Scholar]
- Lawson, R.; Ogden, R. ‘Hybrid’light steel panel and modular systems. Thin-Walled Struct. 2008, 46, 720–730. [Google Scholar] [CrossRef]
- Veljkovic, M.; Johansson, B. Light steel framing for residential buildings. Thin-Walled Struct. 2006, 44, 1272–1279. [Google Scholar] [CrossRef]
- Jaillon, L.; Poon, C.S. The evolution of prefabricated residential building systems in Hong Kong: A review of the public and the private sector. Autom. Constr. 2009, 18, 239–248. [Google Scholar] [CrossRef]
- Wellman, P. Record-Breaking Croydon Tower Gets the Go-Ahead; Radius: Shrewsbury, UK, 2017. [Google Scholar]
- Sun, J. Mid-Rise Timber Construction in Finland: A Study on Material, Technology and Market Maturity. Bachelor’s Thesis, Helsinki Metropolia University of Applied Sciences, Helsinki, Finland, 2016. [Google Scholar]
- Professner, H.; Mathis, C. LifeCycle Tower—High-rise buildings in timber. In Proceedings of the Structures Congress, Chicago, IL, USA, 29–31 March 2012; pp. 1980–1990. [Google Scholar]
- Park, H.K.; Ock, J.-H. Unit modular in-fill construction method for high-rise buildings. KSCE J. Civ. Eng. 2016, 20, 1201–1210. [Google Scholar] [CrossRef]
- Lacey, A.W.; Chen, W.; Hao, H.; Bi, K. Structural response of modular buildings–an overview. J. Build. Eng. 2018, 16, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Holmes, J.D. Wind Loading of Structures; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Hao, H. Predictions of structural response to dynamic loads of different loading rates. Int. J. Prot. Struct. 2015, 6, 585–605. [Google Scholar] [CrossRef] [Green Version]
- Aly, A.M.; Abburu, S. On the design of high-rise buildings for multihazard: Fundamental differences between wind and earthquake demand. Shock Vib. 2015, 2015, 148681. [Google Scholar] [CrossRef] [Green Version]
- Mendis, P.; Ngo, T.; Haritos, N.; Hira, A.; Samali, B.; Cheung, J. Wind loading on tall buildings. Electron. J. Struct. Eng. 2007, 7, 41–54. [Google Scholar] [CrossRef]
- Minor, J.E. Windborne debris and the building envelope. J. Wind Eng. Ind. Aerodyn. 1994, 53, 207–227. [Google Scholar] [CrossRef]
- Wills, J.; Lee, B.; Wyatt, T. A model of wind-borne debris damage. J. Wind Eng. Ind. Aerodyn. 2002, 90, 555–565. [Google Scholar] [CrossRef]
- Minor, J.E. Lessons learned from failures of the building envelope in windstorms. J. Archit. Eng. 2005, 11, 10–13. [Google Scholar] [CrossRef]
- Zhang, X.; Hao, H.; Ma, G. Laboratory test and numerical simulation of laminated glass window vulnerability to debris impact. Int. J. Impact Eng. 2013, 55, 49–62. [Google Scholar] [CrossRef]
- Li, C.; Hao, H.; Zhang, X.; Bi, K. Experimental study of precast segmental columns with unbonded tendons under cyclic loading. Adv. Struct. Eng. 2018, 21, 319–334. [Google Scholar] [CrossRef]
- Li, C.; Bi, K.; Hao, H.; Zhang, X.; Do, T. Cyclic test and numerical study of precast segmental concrete columns with BFRP and TEED. Bull. Earthq. Eng. 2019, 17, 3475–3494. [Google Scholar] [CrossRef]
- Task Committee on Blast-Resistant Design of the Petrochemical Committee of the Energy Division of ASCE. Design of Blast-Resistant Buildings in Petrochemical Facilities; American Society of Civil Engineers: Reston, VA, USA, 2010. [Google Scholar]
- Zhang, X.; Hao, H.; Li, C. Experimental investigation of the response of precast segmental columns subjected to impact loading. Int. J. Impact Eng. 2016, 95, 105–124. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Hao, H. The response of precast concrete segmental columns subjected to near base impact. Int. J. Prot. Struct. 2019, 10, 229–250. [Google Scholar] [CrossRef]
- Ngo, T.; Mendis, P.; Gupta, A.; Ramsay, J. Blast loading and blast effects on structures—An overview. Electron. J. Struct. Eng. 2007, 7, 76–91. [Google Scholar] [CrossRef]
- Zhang, X.; Hao, H.; Li, C.; Tin, V. Experimental study on the behavior of precast segmental column with domed shear key and unbonded Post-Tensioning tendon under impact loading. Eng. Struct. 2018, 173, 589–605. [Google Scholar] [CrossRef]
- Zhang, X.; Hao, H.; Li, M.; Zong, Z.; Bruechert, J. The blast resistant performance of concrete-filled steel-tube segmental columns. J. Constr. Steel Res. 2020, 168, 105997. [Google Scholar] [CrossRef]
- Department of Defense. Design of Buildings to Resist Progressive Collapse: Unified Facilities Criteria (UFC) 4-023-03; Standards; Department of Defense: Washington, DC, USA, 2009.
- Cormie, D. 10 Whole-Building Response to Blast Damage. In Blast Effects on Buildings; Thomas Telford Publishing: London, UK, 2009; pp. 216–249. [Google Scholar]
- Lawson, P.; Byfield, M.; Popo-Ola, S.; Grubb, P. Robustness of light steel frames and modular construction. Proc. Inst. Civ. Eng.-Struct. Build. 2008, 161, 3–16. [Google Scholar] [CrossRef]
- Prewer, J.; Grubb, P.; Lawson, R. Modular Construction Using Light Steel Framing an Architect’s Guide; Report; Steel Construction Institute: Ascot Berkshire, UK, 1999. [Google Scholar]
- Lawson, S.H. AFCEC Conducts CONEX Dorm Field Testing 2017. Available online: http://www.afcec.af.mil/News/Article-Display/Article/1157092/afcec-conducts-conex-dorm-field-testing/ (accessed on 26 October 2022).
- Rippon, J.A. The Benefits and Limitations of Prefabricated Home Manufacturing in North America; University of British Columnbia: Vancouver, BC, Canada, 2011. [Google Scholar]
- Godbole, S.; Lam, N.; Mafas, M.; Fernando, S.; Gad, E.; Hashemi, J. Dynamic loading on a prefabricated modular unit of a building during road transportation. J. Build. Eng. 2018, 18, 260–269. [Google Scholar] [CrossRef]
- Liu, Z.; Gu, Z.; Bai, Y.; Zhong, N. Intermodal transportation of modular structure units. World Rev. Intermodal Transp. Res. 2018, 7, 99–123. [Google Scholar]
- Nester, T.M.; Haddow, A.G.; Shaw, S.W.; Brevick, J.E.; Borowski, V.J. Vibration Reduction in a Variable Displacement Engine Using Pendulum Absorbers; 0148-7191; SAE Technical Paper: Warrendale, PA, USA, 2003. [Google Scholar]
- White, K.; Campbell, J.; Cheong, C.D. Impact poor building design and materials in overseas and off-site constructed modular buildings—A case study of an IEQ investigation into the assembly of pre-fabricated buildings in a hot and humid climate. In Proceedings of the AIOH 33rd Annual Conference & Exhibition, Perth, Australia, 5–9 December 2015. [Google Scholar]
- Singleton, M.; Hutchinson, J. The Development of FRP Composites in Building Construction; Startlink Syst. Ltd.: Camberley, UK, 2010. [Google Scholar]
- Enjily, V.; Reynolds, T. Timber frame buildings: A guide to the construction process. BRE Dig. 2005, 496, 1–12. [Google Scholar]
- Hong, J.; Shen, G.Q.; Li, Z.; Zhang, B.; Zhang, W. Barriers to promoting prefabricated construction in China: A cost–benefit analysis. J. Clean. Prod. 2018, 172, 649–660. [Google Scholar] [CrossRef]
- Pinsent-Masons. Modular Construction in UK Housing—An Overview of the Market, the Players and the Issues; Cambridge Centre for Housing & Planning Research, Univeristy of Cambridge, Pinsent-Masons: London, UK, 2017. [Google Scholar]
- Italian Architect Designs Folding House That Can Be Built in 6 Hours. Available online: https://www.archdaily.com/885915/italian-architect-designs-folding-house-that-can-be-built-in-6-hours (accessed on 12 March 2020).
- Rosenfeld, Y.; Ben-Ami, Y.; Logcher, R. A Prototype “Clicking” Scissor-Link Deployable Structure. Int. J. Space Struct. 1993, 8, 85–95. [Google Scholar] [CrossRef]
- Kaveh, A.; Shojaee, S. Optimal Design of Scissor-Link Foldable Structures Using Ant Colony Optimization Algorithm. Comput.-Aided Civ. Infrastruct. Eng. 2007, 22, 56–64. [Google Scholar] [CrossRef]
- Mousanezhad, D.; Kamrava, S.; Vaziri, A. Origami-based building blocks for modular construction of foldable structures. Sci. Rep. 2017, 7, 14792. [Google Scholar] [CrossRef] [Green Version]
- Tachi, T. Rigid-foldable thick origami. Origami 2011, 5, 253–264. [Google Scholar]
- Waitukaitis, S.; Van Hecke, M. Origami building blocks: Generic and special four-vertices. Phys. Rev. E 2016, 93, 023003. [Google Scholar] [CrossRef] [Green Version]
- Kamrava, S.; Mousanezhad, D.; Ebrahimi, H.; Ghosh, R.; Vaziri, A. Origami-based cellular metamaterial with auxetic, bistable, and self-locking properties. Sci. Rep. 2017, 7, 46046. [Google Scholar] [CrossRef] [Green Version]
- The Spaces. Folding Pre-Fab House Can Be Built Anywhere in 6 Hours. Available online: https://thespaces.com/folding-pre-fab-house-can-be-built-anywhere-in-6-hours/ (accessed on 15 March 2020).
- TenFold Engineering. Available online: https://www.tenfoldengineering.com/ (accessed on 14 March 2020).
- Cai, S.; Ma, Z.; Skibniewski, M.J.; Bao, S. Construction automation and robotics for high-rise buildings over the past decades: A comprehensive review. Adv. Eng. Inform. 2019, 42, 100989. [Google Scholar] [CrossRef]
- Eversmann, P.; Gramazio, F.; Kohler, M. Robotic prefabrication of timber structures: Towards automated large-scale spatial assembly. Constr. Robot. 2017, 1, 49–60. [Google Scholar] [CrossRef]
- Bock, T. Digital design and robotic production of 3D shaped precast components. In Proceedings of the 25th International Symposium on Automation and Robotics in Construction, Vilnius, Lithuania, 26–29 June 2008; pp. 11–21. [Google Scholar]
- Willmann, J.; Knauss, M.; Bonwetsch, T.; Apolinarska, A.A.; Gramazio, F.; Kohler, M. Robotic timber construction—Expanding additive fabrication to new dimensions. Autom. Constr. 2016, 61, 16–23. [Google Scholar] [CrossRef]
- Lee, S.-K.; Doh, N.L.; Park, G.-T.; Kang, K.-I.; Lim, M.-T.; Hong, D.-H.; Park, S.-S.; Lee, U.-K.; Kang, T.-K. Robotic technologies for the automatic assemble of massive beams in high-rise building. In Proceedings of the 2007 International Conference on Control, Automation and Systems, Seoul, Korea, 17–20 October 2007; pp. 1209–1212. [Google Scholar]
- Jung, K.; Chu, B.; Bae, K.; Lee, Y.; Hong, D.; Park, S.; Lim, M.-T. Development of automation system for steel construction based on robotic crane. In Proceedings of the 2008 International Conference on Smart Manufacturing Application, Goyang-si, Korea, 9–11 April 2008; pp. 486–489. [Google Scholar]
- Jung, K.; Kim, D.; Bae, K.; Hong, D. Developement of the gripping control algorithm for wire-suspended object in steel construction. In Proceedings of the 24th International Symposium on Automation and Robotics in Construction, ISARC 2007, Kochi, India, 19–21 September 2007; pp. 151–155. [Google Scholar]
- Chu, B.; Jung, K.; Ko, K.H.; Hong, D. Mechanism and analysis of a robotic bolting device for steel beam assembly. In Proceedings of the ICCAS 2010, Gyeonggi-do, Korea, 27–30 October 2010; pp. 2351–2356. [Google Scholar]
- Chu, B.; Jung, K.; Chu, Y.; Hong, D.; Lim, M.-T.; Park, S.; Lee, Y.; Lee, S.-U.; Kim, M.C.; Ko, K.H. Robotic automation system for steel beam assembly in building construction. In Proceedings of the 2009 4th International Conference on Autonomous Robots and Agents, Wellington, New Zealand, 10–12 February 2009; pp. 38–43. [Google Scholar]
- Wakisaka, T.; Furuya, N.; Inoue, Y.; Shiokawa, T. Automated construction system for high-rise reinforced concrete buildings. Autom. Constr. 2000, 9, 229–250. [Google Scholar] [CrossRef]
- Chea, C.P.; Bai, Y.; Pan, X.; Arashpour, M.; Xie, Y. An integrated review of automation and robotic technologies for structural prefabrication and construction. Transp. Saf. Environ. 2020, 2, 81–96. [Google Scholar] [CrossRef]
- Shen, H.-y.; Wu, J.; Lin, T.; Chen, S.-b. Arc welding robot system with seam tracking and weld pool control based on passive vision. Int. J. Adv. Manuf. Technol. 2008, 39, 669–678. [Google Scholar] [CrossRef]
- Kerber, E.; Heimig, T.; Stumm, S.; Oster, L.; Brell-Cokcan, S.; Reisgen, U. Towards robotic fabrication in joining of steel. In Proceedings of the International Symposium on Automation and Robotics in Construction, Bogota, Colombia, 13–15 July 2022; pp. 1–9. [Google Scholar]
- Balaguer, C.; Abderrahim, M. Robotics and Automation in Construction; BoD–Books on Demand: Norderstedt, Germany, 2008. [Google Scholar]
- Ardiny, H.; Witwicki, S.; Mondada, F. Are autonomous mobile robots able to take over construction? A review. Int. J. Robot. 2015, 4, 10–21. [Google Scholar]
- Subrin, K.; Bressac, T.; Garnier, S.; Ambiehl, A.; Paquet, E.; Furet, B. Improvement of the mobile robot location dedicated for habitable house construction by 3D printing. IFAC-Pap. 2018, 51, 716–721. [Google Scholar] [CrossRef]
- Ma, G.; Wang, L.; Ju, Y. State-of-the-art of 3D printing technology of cementitious material—An emerging technique for construction. Sci. China Technol. Sci. 2018, 61, 475–495. [Google Scholar] [CrossRef]
- Relefors, J.; Momeni, M.; Pettersson, L.; Hellström, E.; Thunell, A.; Papadopoulos, A.V.; Nolte, T. Towards Automated Installation of Reinforcement Using Industrial Robots. In Proceedings of the 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 1595–1598. [Google Scholar]
- Sweet, R. The contractor who invented a construction robot. Constr. Res. Innov. 2018, 9, 9–12. [Google Scholar] [CrossRef]
- George, E.; Posey, S. Rebar Automating Robot; Google Patents: Mountain View, CA, USA, 2020. [Google Scholar]
- Balaguer, C.; Abderrahim, M. Trends in Robotics and Automation in Construction, Robotics and Automation in Construction. 2008. Available online: http://www.intechopen.com/books/robotics_and_automation_in_construction/trends_in_robotics_and_automation_in_construction (accessed on 20 February 2020).
- You, S.N.; Lee, S.Y.; Choi, H.S.; Han, C.-S.; Lee, K.-Y.; Lee, S.-H. Multl-DOF (degree of freedom) construction robot for a curtain wall installation of a skyscraper. In Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC); IAARC: Jeju, Korea, 2004; pp. 1–6. [Google Scholar]
- Han, C.S.; Lee, S.Y.; Lee, K.Y.; Park, B.S. A multidegree-of-freedom manipulator for curtain-wall installation. J. Field Robot. 2006, 23, 347–360. [Google Scholar] [CrossRef]
- Helm, V.; Ercan, S.; Gramazio, F.; Kohler, M. Mobile robotic fabrication on construction sites: DimRob. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 4335–4341. [Google Scholar]
- Sousa, J.P.; Varela, P.A.; Martins, P.F. Between manual and robotic approaches to brick construction in architecture. In Conference Paper, the 33rd eCAADe Conference; Vienna Univeristy of Techonology: Vienna, Austra, 2015. [Google Scholar]
- Malakhov, A.; Shutin, D. Applying the Automated and Robotic Means for Increasing Effectiveness of Construction Projects. IOP Conf. Ser. Mater. Sci. Eng. 2020, 753, 042055. [Google Scholar] [CrossRef]
- Available online: https://www.construction-robotics.com/sam100/ (accessed on 21 March 2020).
- Precision Construction Robot. Available online: https://www.fbr.com.au/view/hadrian-x (accessed on 26 October 2022).
- Kim, S.; Moore, A.; Srinivasan, D.; Akanmu, A.; Barr, A.; Harris-Adamson, C.; Rempel, D.M.; Nussbaum, M.A. Potential of exoskeleton technologies to enhance safety, health, and performance in construction: Industry perspectives and future research directions. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 185–191. [Google Scholar] [CrossRef]
- Cho, Y.K.; Kim, K.; Ma, S.; Ueda, J. A robotic wearable exoskeleton for construction worker’s safety and health. In Proceedings of the ASCE Construction Research Congress, New Orleans, LA, USA, 2–4 April 2018; pp. 19–28. [Google Scholar] [CrossRef]
- Yu, H.; Choi, I.S.; Han, K.-L.; Choi, J.Y.; Chung, G.; Suh, J. Development of a upper-limb exoskeleton robot for refractory construction. Control Eng. Pract. 2018, 72, 104–113. [Google Scholar] [CrossRef]
- Ho, P.H. Labour and skill shortages in Hong Kong’s construction industry. Eng. Constr. Archit. Manag. 2016, 23, 533–550. [Google Scholar] [CrossRef]
- Jaillon, L.; Poon, C.-S. Sustainable construction aspects of using prefabrication in dense urban environment: A Hong Kong case study. Constr. Manag. Econ. 2008, 26, 953–966. [Google Scholar] [CrossRef]
- Pan, W. Methodological Development for Exploring the Potential to Implement On-Site Robotics and Automation in the Context of Public Housing Construction in Hong Kong; Technische Universität München: Munich, Germany, 2020. [Google Scholar]
- Bock, T. The future of construction automation: Technological disruption and the upcoming ubiquity of robotics. Autom. Constr. 2015, 59, 113–121. [Google Scholar] [CrossRef]
- Fingrut, A.; Crolla, K.; Lau, D. Automation Complexity-Brick By Brick. In Proceedings of the 24th International Conference of the Association for Computer-Aided Architectural Design Research in Asia (CAADRIA) 2019, Hong Kong, China, 19–21 April 2019; Volume 1, pp. 93–102. [Google Scholar]
- Rebolj, D.; Babič, N.Č.; Magdič, A.; Podbreznik, P.; Pšunder, M. Automated construction activity monitoring system. Adv. Eng. Inform. 2008, 22, 493–503. [Google Scholar] [CrossRef]
- Kopsida, M.; Brilakis, I.; Vela, P.A. A review of automated construction progress monitoring and inspection methods. In Proceedings of the 32nd CIB W78 Conference 2015, Eindhoven, The Netherlands, 27–29 October 2015; pp. 421–431. [Google Scholar]
- Shim, C.-S.; Dang, S.N.; Park, S. Three-Dimensional Information Delivery for Design and Construction of Prefabricated Bridge Piers. Struct. Eng. Int. 2018, 28, 6–12. [Google Scholar] [CrossRef]
- Song, J.; Haas, C.T.; Caldas, C.H. Tracking the location of materials on construction job sites. J. Constr. Eng. Manag. 2006, 132, 911–918. [Google Scholar] [CrossRef] [Green Version]
- Song, J.; Haas, C.T.; Caldas, C.H. A proximity-based method for locating RFID tagged objects. Adv. Eng. Inform. 2007, 21, 367–376. [Google Scholar] [CrossRef]
- Valero, E.; Adán, A. Integration of RFID with other technologies in construction. Measurement 2016, 94, 614–620. [Google Scholar] [CrossRef]
- Wang, X.; Truijens, M.; Hou, L.; Wang, Y.; Zhou, Y. Integrating Augmented Reality with Building Information Modeling: Onsite construction process controlling for liquefied natural gas industry. Autom. Constr. 2014, 40, 96–105. [Google Scholar] [CrossRef]
- Ergen, E.; Akinci, B.; Sacks, R. Tracking and locating components in a precast storage yard utilizing radio frequency identification technology and GPS. Autom. Constr. 2007, 16, 354–367. [Google Scholar] [CrossRef]
- Wona, D.; Chi, S.; Park, M.-W. UAV-RFID Integration for Construction Resource Localization. KSCE J. Civ. Eng. 2020, 24, 1683–1695. [Google Scholar] [CrossRef]
- Kiziltas, S.; Akinci, B.; Ergen, E.; Tang, P.; Gordon, C. Technological assessment and process implications of field data capture technologies for construction and facility/infrastructure management. Electron. J. Inf. Technol. Constr. 2008, 13, 134–154. [Google Scholar]
- Golparvar-Fard, M.; Pena-Mora, F.; Savarese, S. Automated progress monitoring using unordered daily construction photographs and IFC-based building information models. J. Comput. Civ. Eng. 2015, 29, 04014025. [Google Scholar] [CrossRef]
- Salehi, S.A.; Yitmen, İ. Modeling and analysis of the impact of BIM-based field data capturing technologies on automated construction progress monitoring. Int. J. Civ. Eng. 2018, 16, 1669–1685. [Google Scholar] [CrossRef]
- Hui, L.; Park, M.; Brilakis, I. Automated In-Placed Brick Counting for Façade Construction Progress Estimation. In Proceedings of the 2014 International Conference on Computing in Civil and Building Engineering, Orlando, FL, USA, 23–25 June 2014; pp. 958–965. [Google Scholar]
- Ali, H.; Seifert, C.; Jindal, N.; Paletta, L.; Paar, G. Window detection in facades. In Proceedings of the 14th International Conference on Image Analysis and Processing (ICIAP 2007), Modena, Italy, 10–14 September 2007; pp. 837–842. [Google Scholar]
- Hensler, J.; Blaich, M.; Bittel, O. Real-time door detection based on adaboost learning algorithm. In Proceedings of the International Conference on Research and Education in Robotics, La Ferté-Bernard, France, 21–23 May 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 61–73. [Google Scholar]
- Goyal, D.; Pabla, B. The vibration monitoring methods and signal processing techniques for structural health monitoring: A review. Arch. Comput. Methods Eng. 2016, 23, 585–594. [Google Scholar] [CrossRef]
- Antunes, P.C.; Dias, J.M.; Varum, H.; André, P. Dynamic structural health monitoring of a civil engineering structure with a POF accelerometer. Sens. Rev. 2014, 34, 36–41. [Google Scholar] [CrossRef]
- Patil, P.K.; Patil, S. Review on structural health monitoring system using WSN for bridges. In Proceedings of the 2017 International Conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; pp. 628–631. [Google Scholar]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vib. Dig. 2006, 38, 91–130. [Google Scholar] [CrossRef] [Green Version]
- Chan, T.H.; Yu, L.; Tam, H.-Y.; Ni, Y.-Q.; Liu, S.; Chung, W.; Cheng, L. Fiber Bragg grating sensors for structural health monitoring of Tsing Ma bridge: Background and experimental observation. Eng. Struct. 2006, 28, 648–659. [Google Scholar] [CrossRef]
- Kinet, D.; Mégret, P.; Goossen, K.W.; Qiu, L.; Heider, D.; Caucheteur, C. Fiber Bragg grating sensors toward structural health monitoring in composite materials: Challenges and solutions. Sensors 2014, 14, 7394–7419. [Google Scholar] [CrossRef] [PubMed]
- Moyo, P.; Brownjohn, J.; Suresh, R.; Tjin, S. Development of fiber Bragg grating sensors for monitoring civil infrastructure. Eng. Struct. 2005, 27, 1828–1834. [Google Scholar] [CrossRef]
- Murukeshan, V.; Chan, P.; Ong, L.; Seah, L. Cure monitoring of smart composites using fiber Bragg grating based embedded sensors. Sens. Actuators A Phys. 2000, 79, 153–161. [Google Scholar] [CrossRef]
- Ferraro, P.; De Natale, G. On the possible use of optical fiber Bragg gratings as strain sensors for geodynamical monitoring. Opt. Lasers Eng. 2002, 37, 115–130. [Google Scholar] [CrossRef]
- Davis, M.; Bellemore, D.; Kersey, A. Distributed fiber Bragg grating strain sensing in reinforced concrete structural components. Cem. Concr. Compos. 1997, 19, 45–57. [Google Scholar] [CrossRef]
- Lan, C.; Zhou, Z.; Ou, J. Monitoring of structural prestress loss in RC beams by inner distributed Brillouin and fiber Bragg grating sensors on a single optical fiber. Struct. Control Health Monit. 2014, 21, 317–330. [Google Scholar] [CrossRef]
- Kerrouche, A.; Leighton, J.; Boyle, W.; Gebremichael, Y.; Sun, T.; Grattan, K.T.; Taljsten, B. Strain measurement on a rail bridge loaded to failure using a fiber Bragg grating-based distributed sensor system. IEEE Sens. J. 2008, 8, 2059–2065. [Google Scholar] [CrossRef]
- Kim, H.-I.; Kang, L.-H.; Han, J.-H. Shape estimation with distributed fiber Bragg grating sensors for rotating structures. Smart Mater. Struct. 2011, 20, 035011. [Google Scholar] [CrossRef]
- Lovse, J.; Teskey, W.; Lachapelle, G.; Cannon, M. Dynamic deformation monitoring of tall structure using GPS technology. J. Surv. Eng. 1995, 121, 35–40. [Google Scholar] [CrossRef]
- Celebi, M.; Sanli, A. GPS in pioneering dynamic monitoring of long-period structures. Earthq. Spectra 2002, 18, 47–61. [Google Scholar] [CrossRef]
- Yi, T.H.; Li, H.N.; Gu, M. Recent research and applications of GPS-based monitoring technology for high-rise structures. Struct. Control Health Monit. 2013, 20, 649–670. [Google Scholar] [CrossRef]
- Nickitopoulou, A.; Protopsalti, K.; Stiros, S. Monitoring dynamic and quasi-static deformations of large flexible engineering structures with GPS: Accuracy, limitations and promises. Eng. Struct. 2006, 28, 1471–1482. [Google Scholar] [CrossRef]
- Im, S.B.; Hurlebaus, S.; Kang, Y.J. Summary review of GPS technology for structural health monitoring. J. Struct. Eng. 2013, 139, 1653–1664. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Elbeltagi, E.; Hu, J.W.; Elrefai, A. Recent advances of structures monitoring and evaluation using GPS-time series monitoring systems: A review. ISPRS Int. J. Geo-Inf. 2017, 6, 382. [Google Scholar] [CrossRef] [Green Version]
- Kaloop, M.; Kim, D. GPS-structural health monitoring of a long span bridge using neural network adaptive filter. Surv. Rev. 2014, 46, 7–14. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring: With Piezoelectric Wafer Active Sensors; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Giurgiutiu, V.; Zagrai, A.; Jing Bao, J. Piezoelectric wafer embedded active sensors for aging aircraft structural health monitoring. Struct. Health Monit. 2002, 1, 41–61. [Google Scholar] [CrossRef]
- Park, G.; Sohn, H.; Farrar, C.R.; Inman, D.J. Overview of piezoelectric impedance-based health monitoring and path forward. Shock Vib. Dig. 2003, 35, 451–464. [Google Scholar] [CrossRef] [Green Version]
- Park, G.; Inman, D.J. Structural health monitoring using piezoelectric impedance measurements. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 373–392. [Google Scholar] [CrossRef]
- Kong, Q.; Fan, S.; Bai, X.; Mo, Y.; Song, G. A novel embeddable spherical smart aggregate for structural health monitoring: Part I. Fabrication and electrical characterization. Smart Mater. Struct. 2017, 26, 095050. [Google Scholar] [CrossRef]
- Feng, Q.; Kong, Q.; Huo, L.; Song, G. Crack detection and leakage monitoring on reinforced concrete pipe. Smart Mater. Struct. 2015, 24, 115020. [Google Scholar] [CrossRef]
- Rathinam, S.; Kim, Z.W.; Sengupta, R. Vision-based monitoring of locally linear structures using an unmanned aerial vehicle. J. Infrastruct. Syst. 2008, 14, 52–63. [Google Scholar] [CrossRef]
- Hallermann, N.; Morgenthal, G.; Rodehorst, V. Unmanned aerial systems (uas)–case studies of vision based monitoring of ageing structures. In Proceedings of the International Symposium Non-Destructive Testing in Civil Engineering (NDT-CE), Berlin, Germany, 15–17 September 2015; pp. 15–17. [Google Scholar]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection–A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Choi, H.-S.; Cheung, J.-H.; Kim, S.-H.; Ahn, J.-H. Structural dynamic displacement vision system using digital image processing. NDT E Int. 2011, 44, 597–608. [Google Scholar] [CrossRef]
- Qi, X.; Lichti, D.D.; El-Badry, M.; Chan, T.O.; El-Halawany, S.I.; Lahamy, H.; Steward, J. Structural dynamic deflection measurement with range cameras. Photogramm. Rec. 2014, 29, 89–107. [Google Scholar] [CrossRef]
- Ribeiro, D.; Calçada, R.; Ferreira, J.; Martins, T. Non-contact measurement of the dynamic displacement of railway bridges using an advanced video-based system. Eng. Struct. 2014, 75, 164–180. [Google Scholar] [CrossRef]
- Spencer Jr, B.F.; Hoskere, V.; Narazaki, Y. Advances in computer vision-based civil infrastructure inspection and monitoring. Engineering 2019, 5, 199–222. [Google Scholar] [CrossRef]
- Ye, X.-W.; Dong, C.; Liu, T. A review of machine vision-based structural health monitoring: Methodologies and applications. J. Sens. 2016, 2016, 7103039. [Google Scholar] [CrossRef] [Green Version]
- Cha, Y.-J.; Choi, W. Vision-based concrete crack detection using a convolutional neural network. In Dynamics of Civil Structures; Springer: Berlin/Heidelberg, Germany, 2017; Volume 2, pp. 71–73. [Google Scholar]
- Dimitrov, A.; Golparvar-Fard, M. Vision-based material recognition for automated monitoring of construction progress and generating building information modeling from unordered site image collections. Adv. Eng. Inform. 2014, 28, 37–49. [Google Scholar] [CrossRef]
- Staszewski, W.J.; bin Jenal, R.; Klepka, A.; Szwedo, M.; Uhl, T. A review of laser Doppler vibrometry for structural health monitoring applications. Key Eng. Mater. 2012, 518, 1–15. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z. Lamb wave structural health monitoring using a hybrid PZT-laser vibrometer approach. Struct. Health Monit. 2013, 12, 469–483. [Google Scholar] [CrossRef]
- Rothberg, S.; Allen, M.; Castellini, P.; Di Maio, D.; Dirckx, J.; Ewins, D.; Halkon, B.J.; Muyshondt, P.; Paone, N.; Ryan, T. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Lasers Eng. 2017, 99, 11–22. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.-W.; Jeon, B.-G.; Cheung, J.-H.; Kim, S.-D.; Park, J.-B. Stay cable tension estimation using a vision-based monitoring system under various weather conditions. J. Civ. Struct. Health Monit. 2017, 7, 343–357. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Adeli, H.; Yeh, C. Perceptron learning in engineering design. Comput.-Aided Civ. Infrastruct. Eng. 1989, 4, 247–256. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Caffe. Available online: http://caffe.berkeleyvision.org/ (accessed on 2 April 2020).
- TensorFlow. Available online: https://tensorflow.google.cn/ (accessed on 4 February 2020).
- Pytorch. Available online: https://github.com/pytorch (accessed on 13 March 2020).
- Alipour, M.; Harris, D.K.; Miller, G.R. Robust pixel-level crack detection using deep fully convolutional neural networks. J. Comput. Civ. Eng. 2019, 33, 04019040. [Google Scholar] [CrossRef]
- Song, Q.; Wu, Y.; Xin, X.; Yang, L.; Yang, M.; Chen, H.; Liu, C.; Hu, M.; Chai, X.; Li, J. Real-time tunnel crack analysis system via deep learning. IEEE Access 2019, 7, 64186–64197. [Google Scholar] [CrossRef]
- Park, S.; Bang, S.; Kim, H.; Kim, H. Patch-based crack detection in black box images using convolutional neural networks. J. Comput. Civ. Eng. 2019, 33, 04019017. [Google Scholar] [CrossRef]
- Gibert, X.; Patel, V.M.; Chellappa, R. Deep multitask learning for railway track inspection. IEEE Trans. Intell. Transp. Syst. 2016, 18, 153–164. [Google Scholar] [CrossRef] [Green Version]
- Gulgec, N.S.; Takáč, M.; Pakzad, S.N. Convolutional neural network approach for robust structural damage detection and localization. J. Comput. Civ. Eng. 2019, 33, 04019005. [Google Scholar] [CrossRef]
- Ni, Y.; Ye, X.; Ko, J. Monitoring-based fatigue reliability assessment of steel bridges: Analytical model and application. J. Struct. Eng. 2010, 136, 1563–1573. [Google Scholar] [CrossRef]
- Wang, M.; Cheng, J.C. A unified convolutional neural network integrated with conditional random field for pipe defect segmentation. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 162–177. [Google Scholar] [CrossRef]
- Gao, Y.; Mosalam, K.M. Deep transfer learning for image-based structural damage recognition. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 748–768. [Google Scholar] [CrossRef]
Figure 1.
Illustration of 3D concrete printing system [20].
Figure 1.
Illustration of 3D concrete printing system [20].

Figure 2.
Different prefabricated and modular constructions.


Figure 3.
Field test on CONEX for progressive collapse [93].
Figure 3.
Field test on CONEX for progressive collapse [93].


Figure 6.
Welding robot (a) Mobile Welding robot; (b) Welding robots attaching on structure [125,126,128].


Figure 8.
(a,b) Rebar tying Robots [131,132,133]; (c) Concrete surface compacting robot [127,134]; (d) Façade wall modular installation robot [135,136].



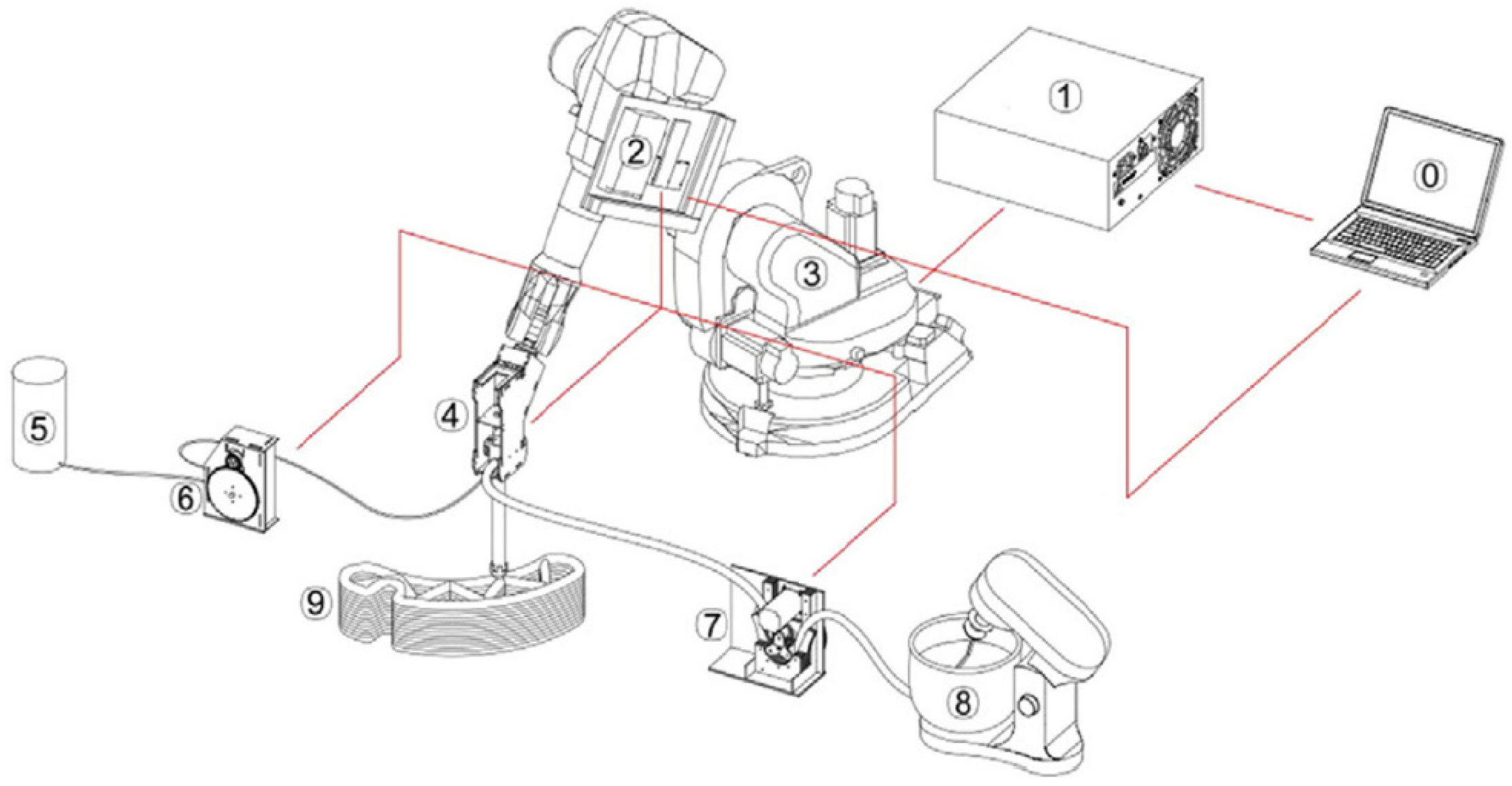{kind=link}
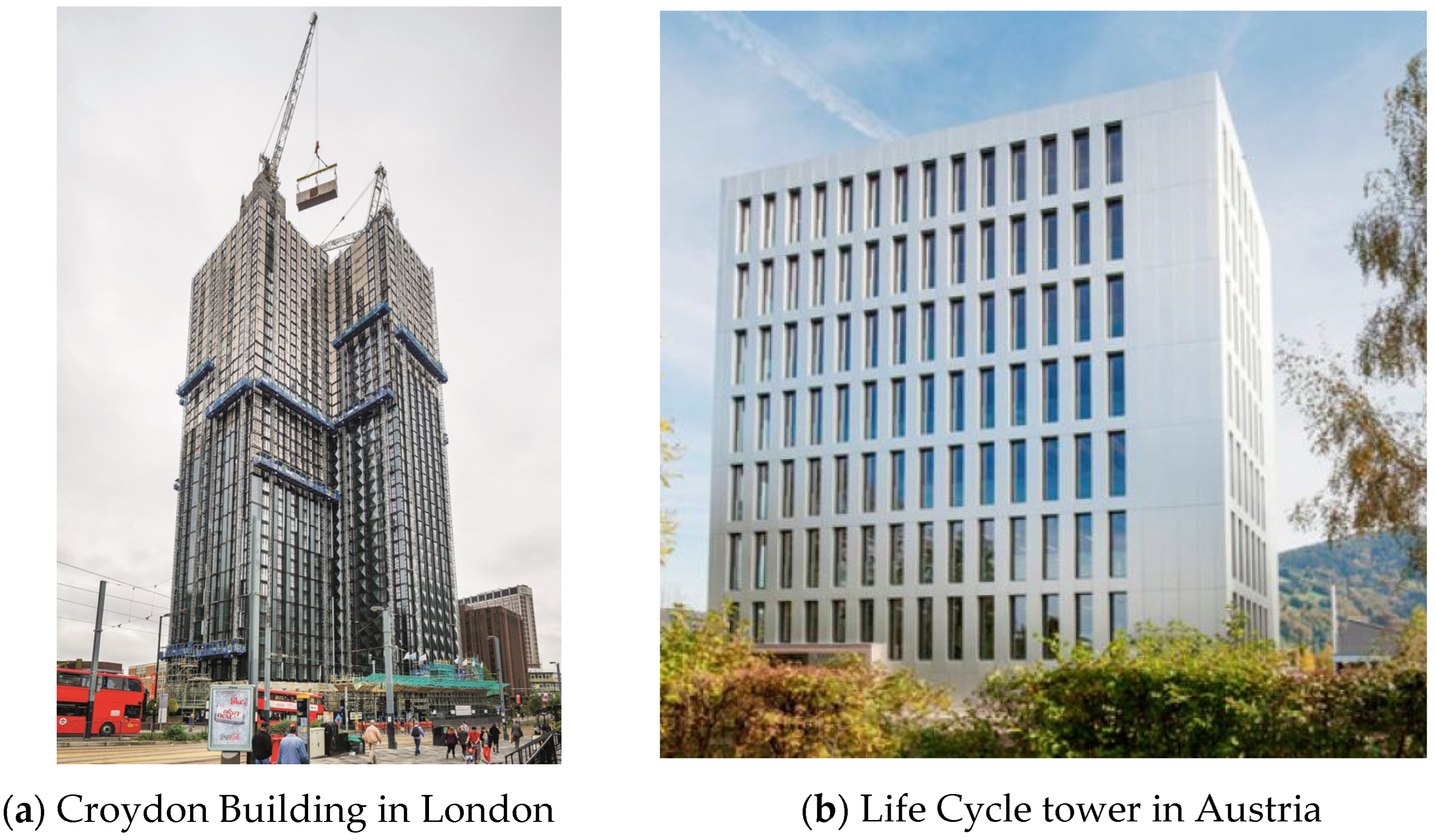{kind=link}
{kind=link}
{kind=link}
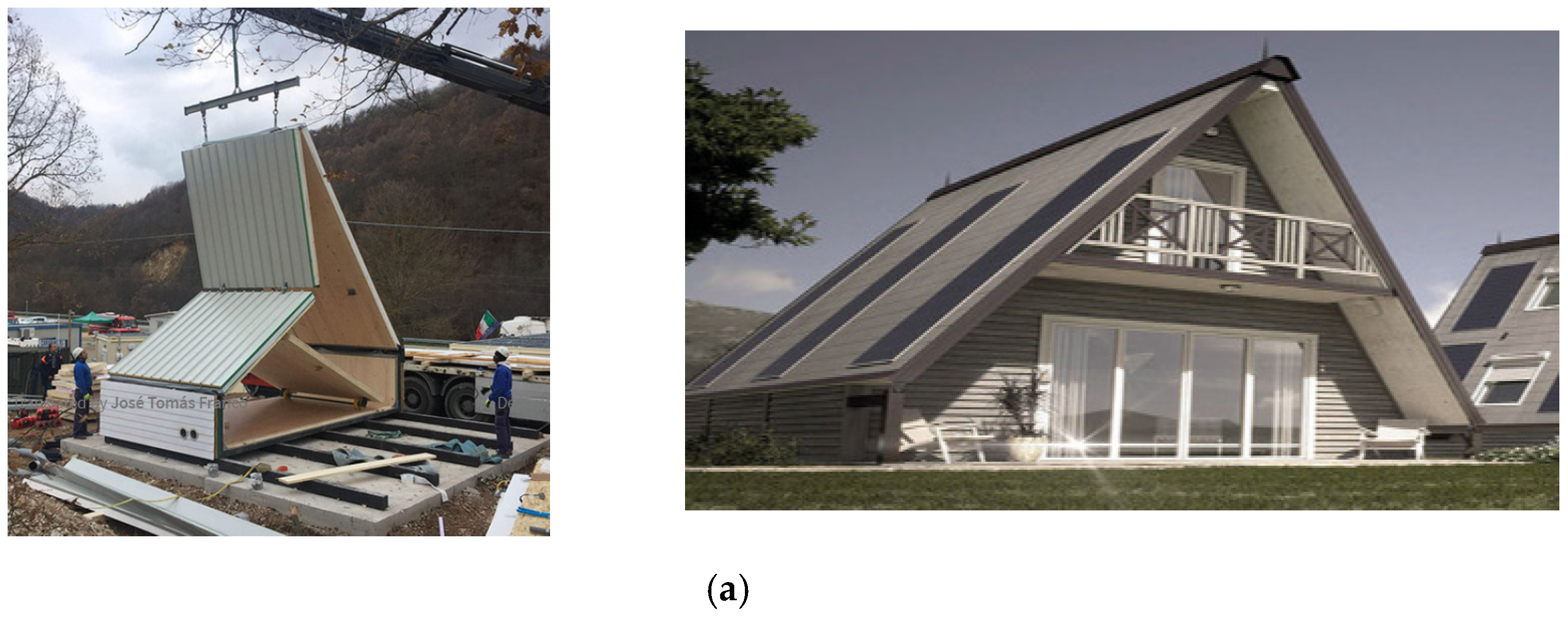{kind=link}
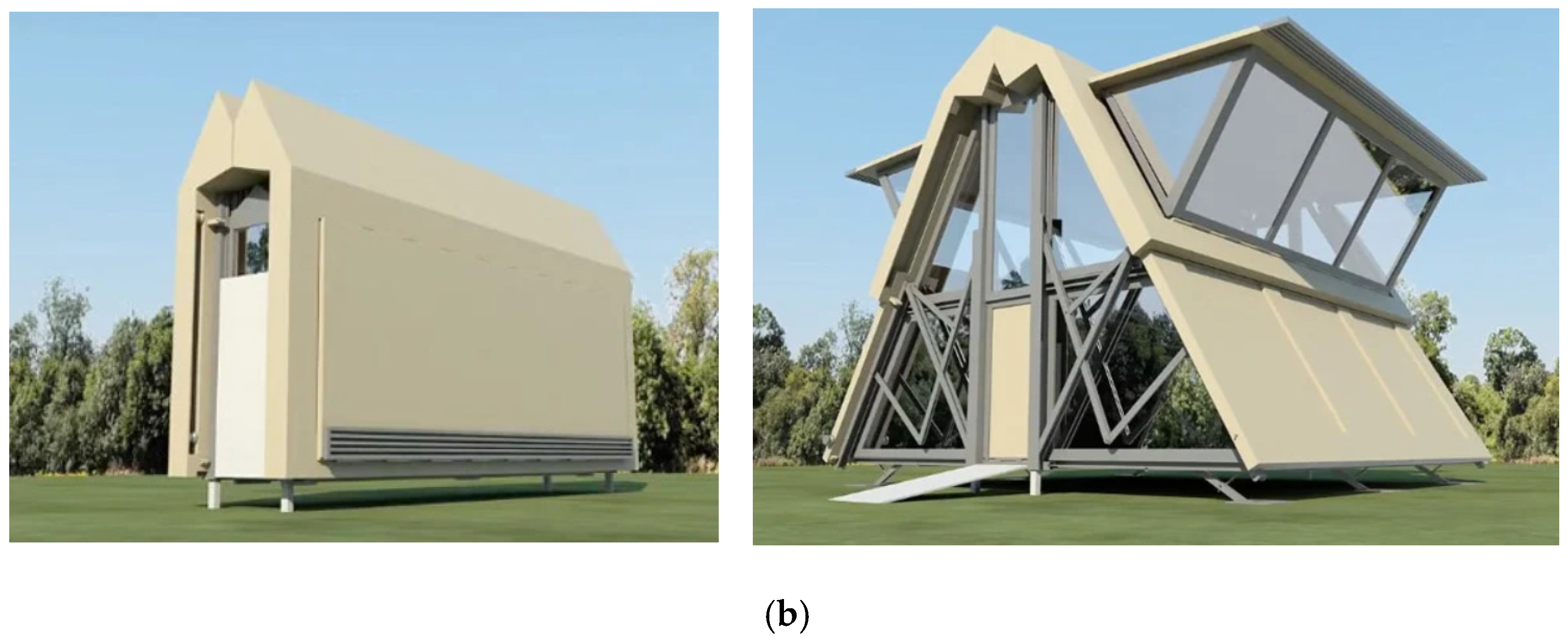{kind=link}
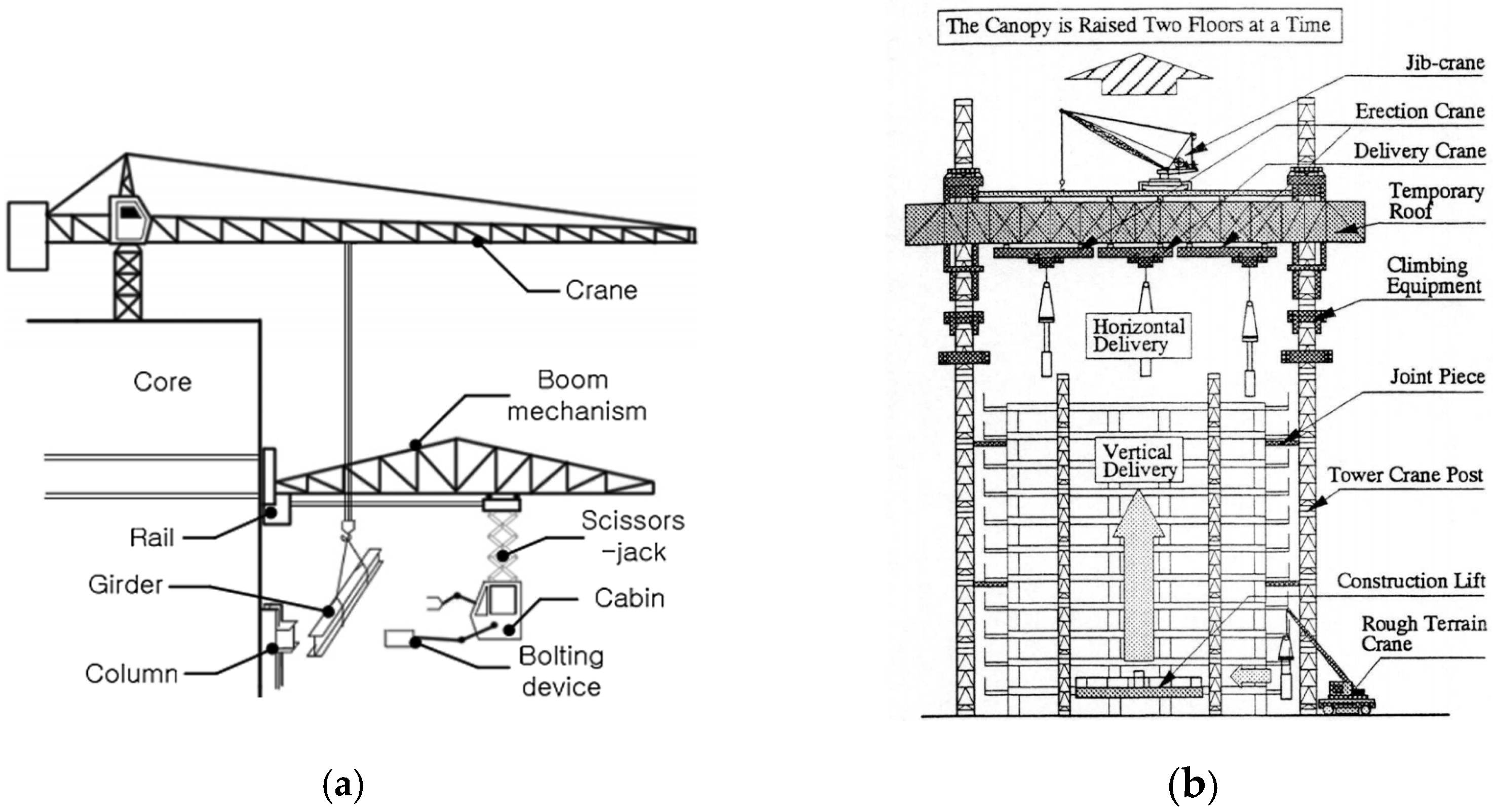{kind=link}
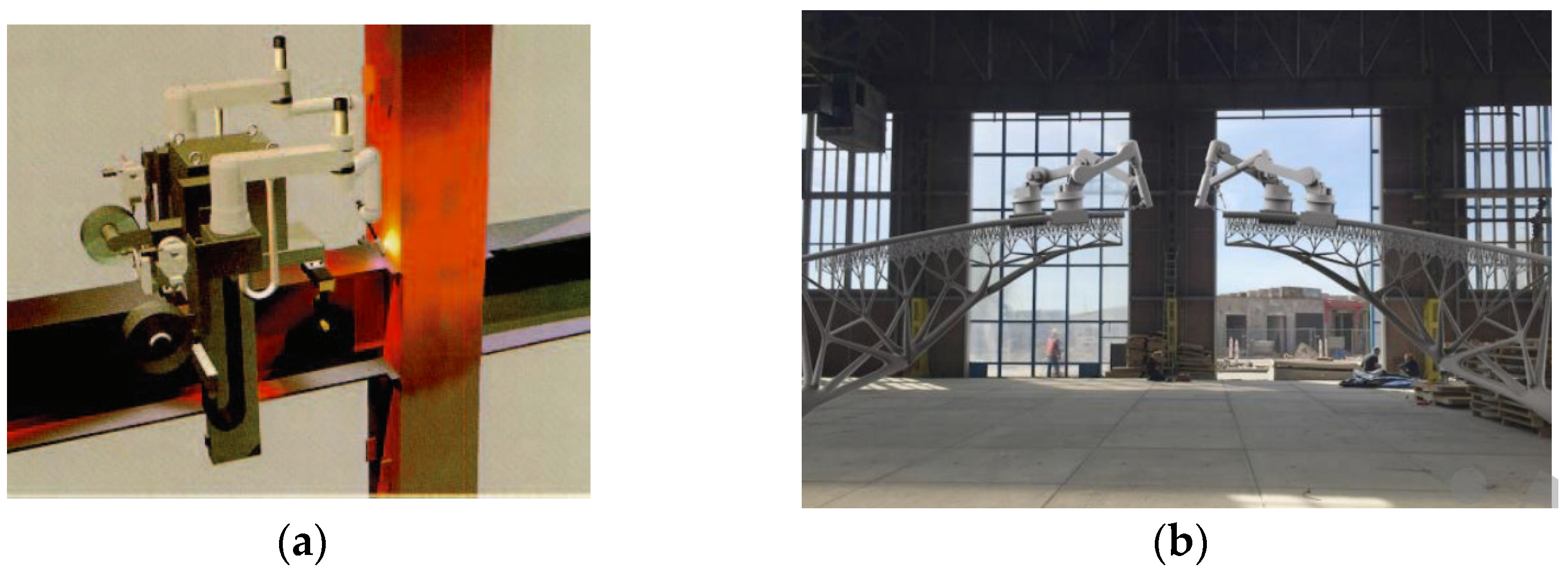{kind=link}
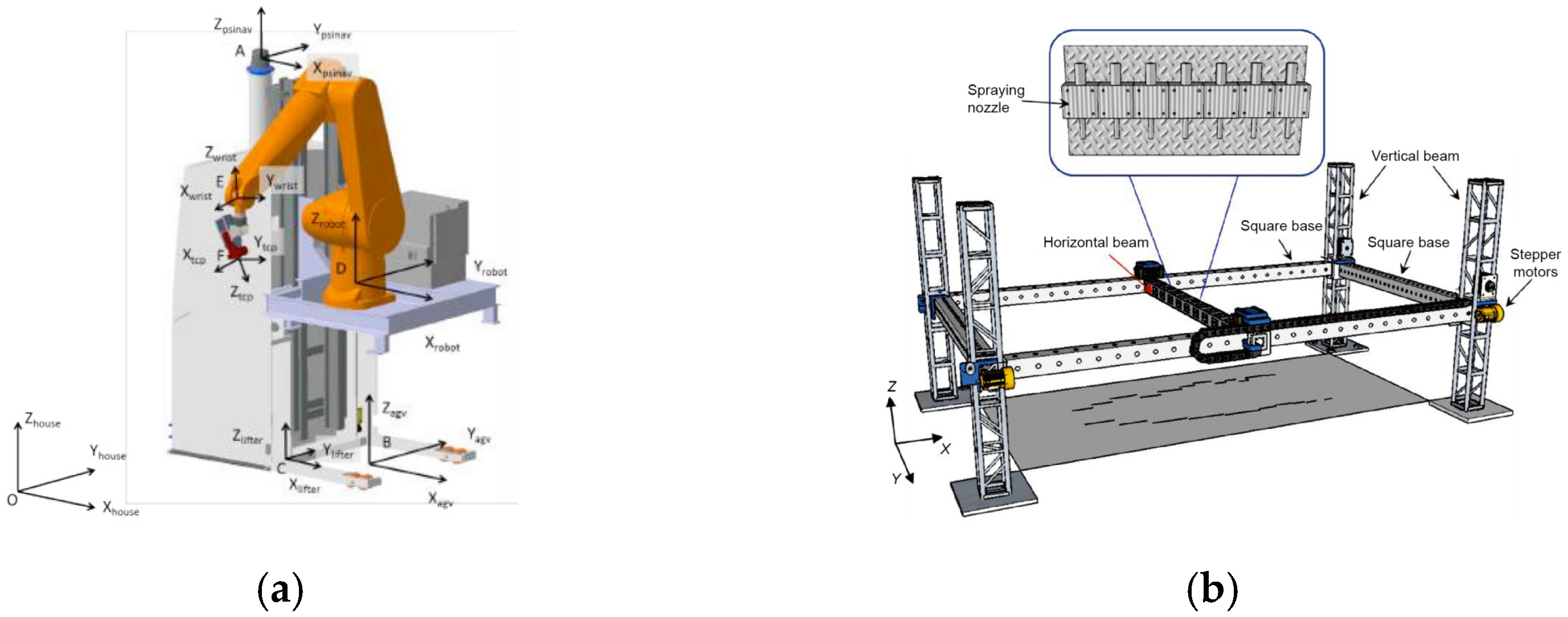{kind=link}
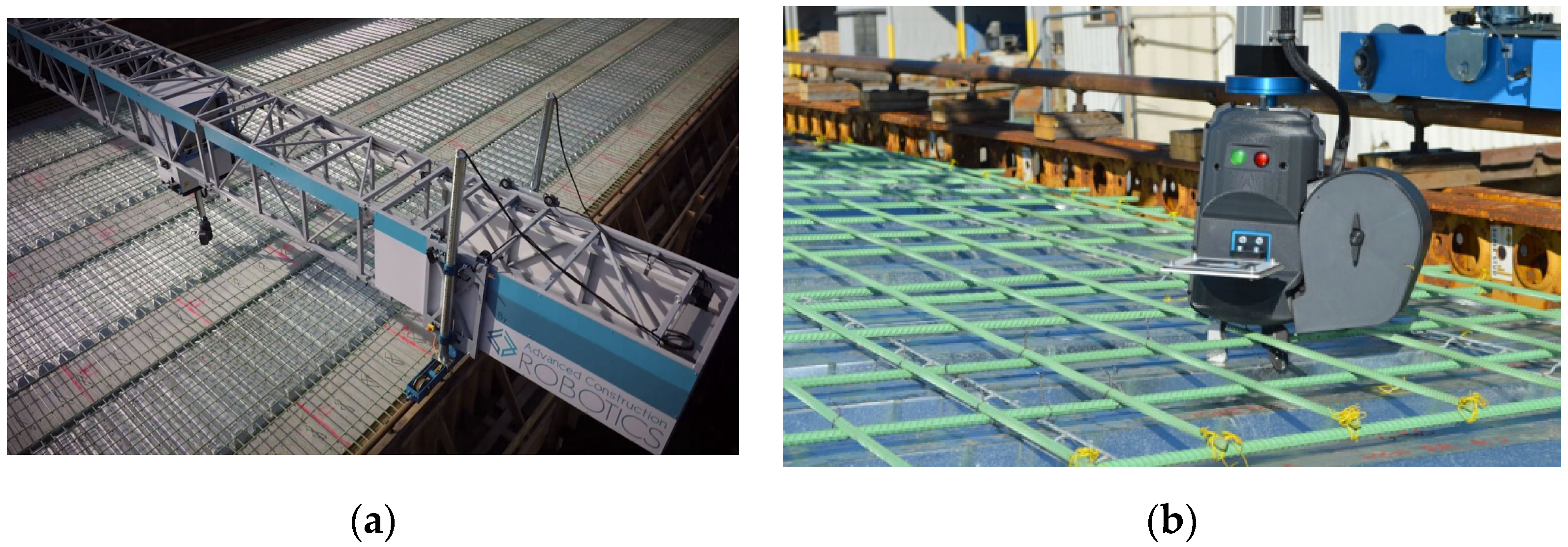{kind=link}
{kind=link}
{kind=link}
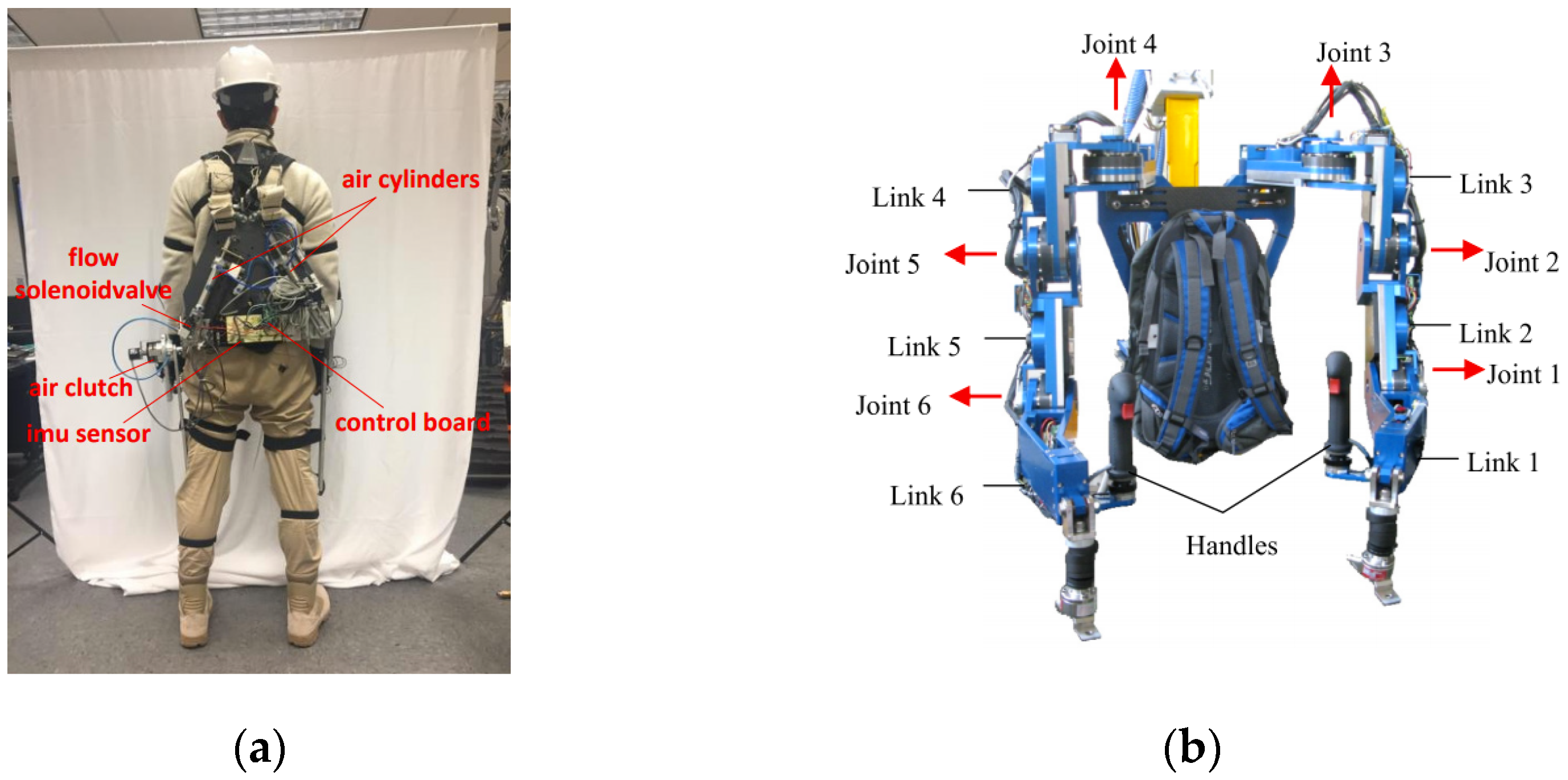{kind=link}
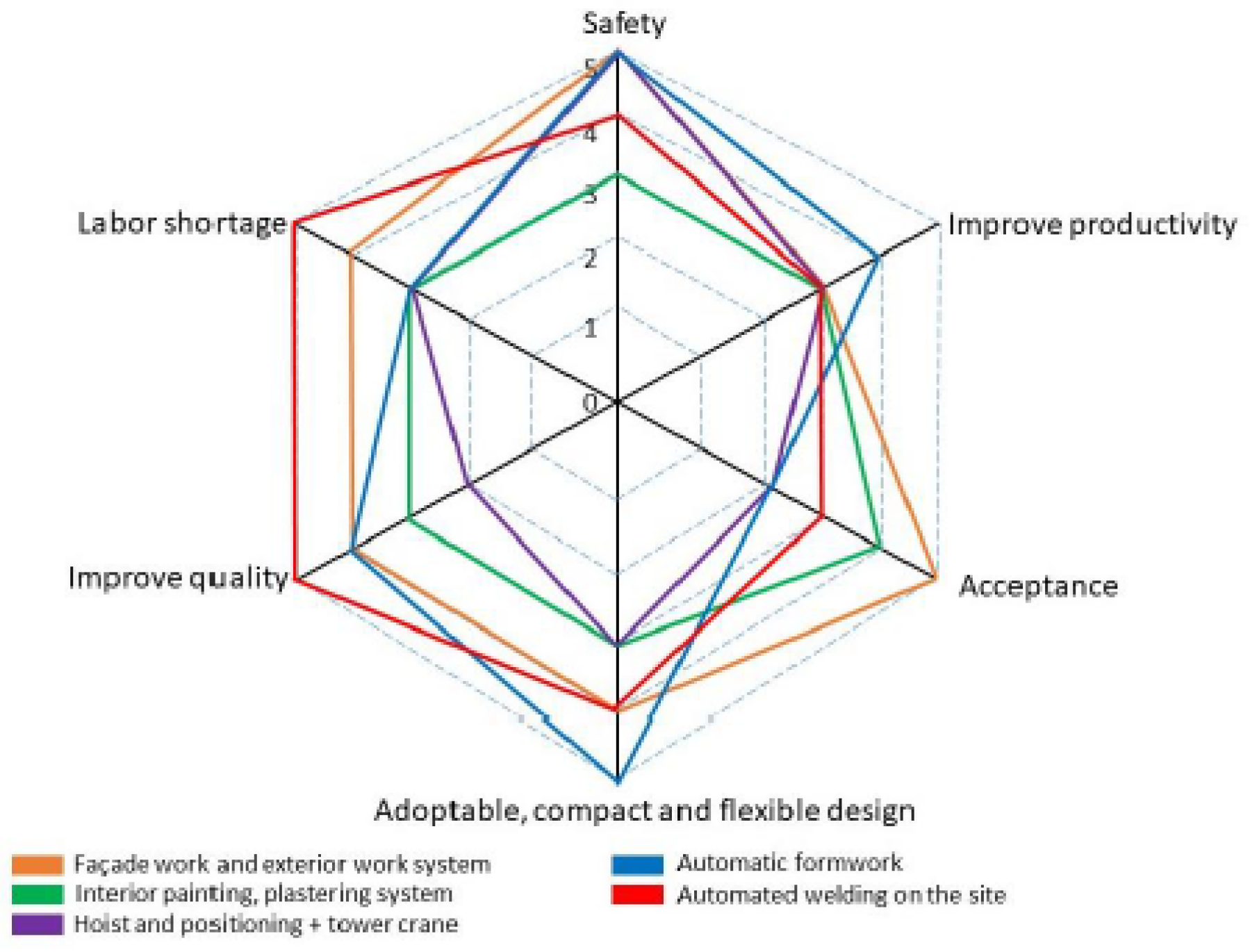{kind=link}
{kind=link}
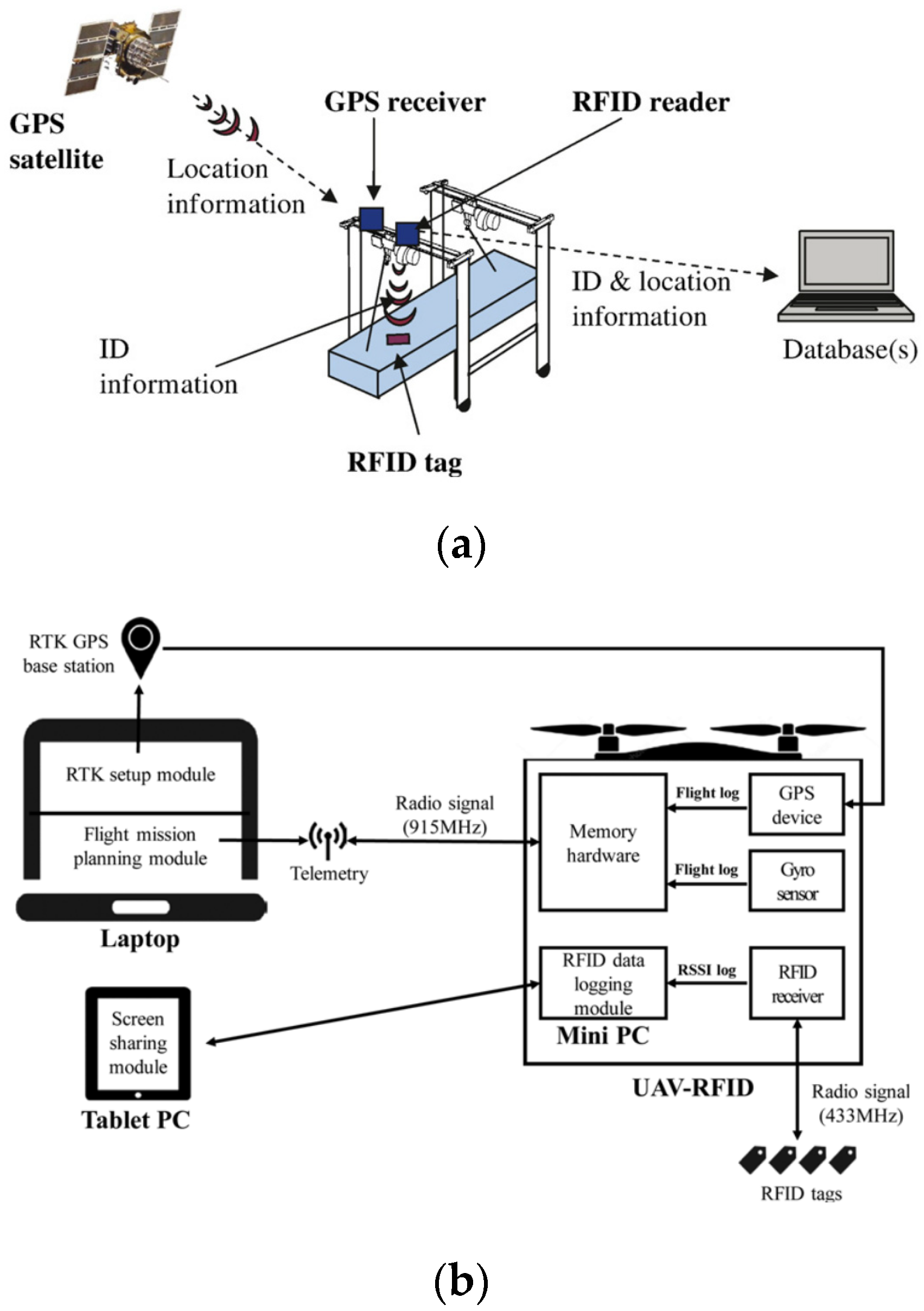{kind=link}
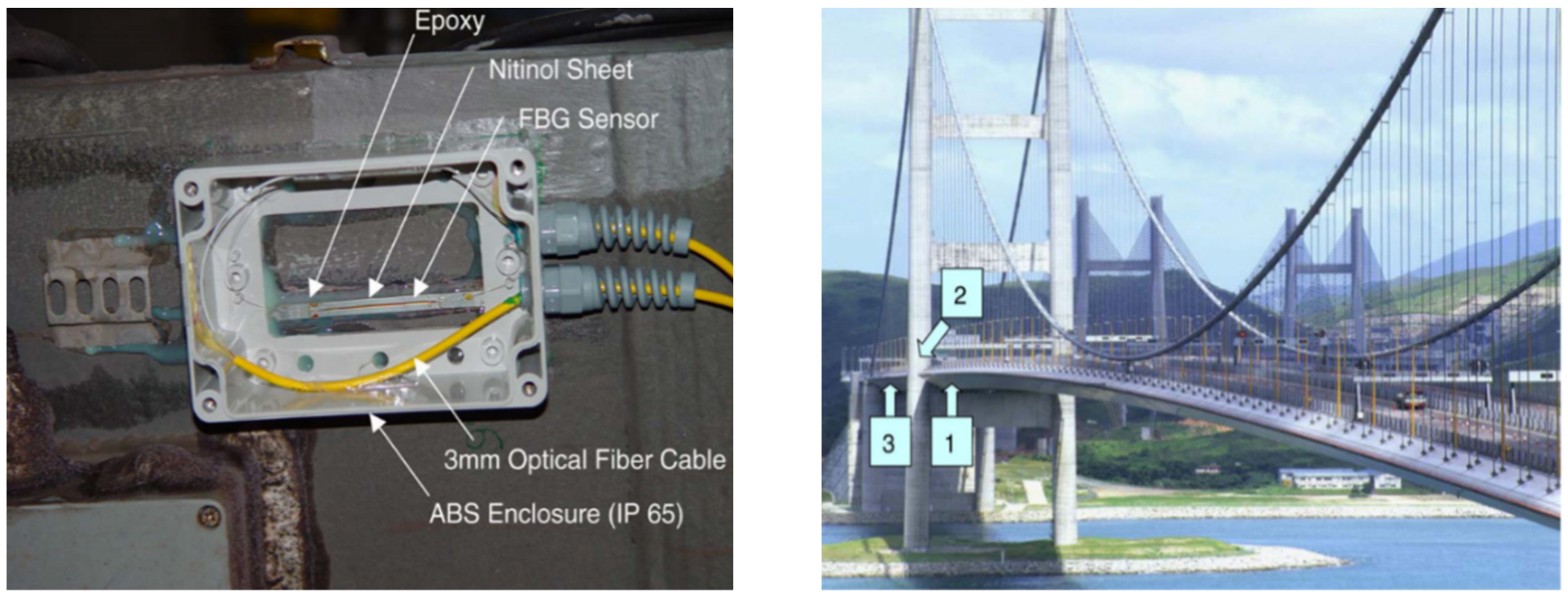{kind=link}
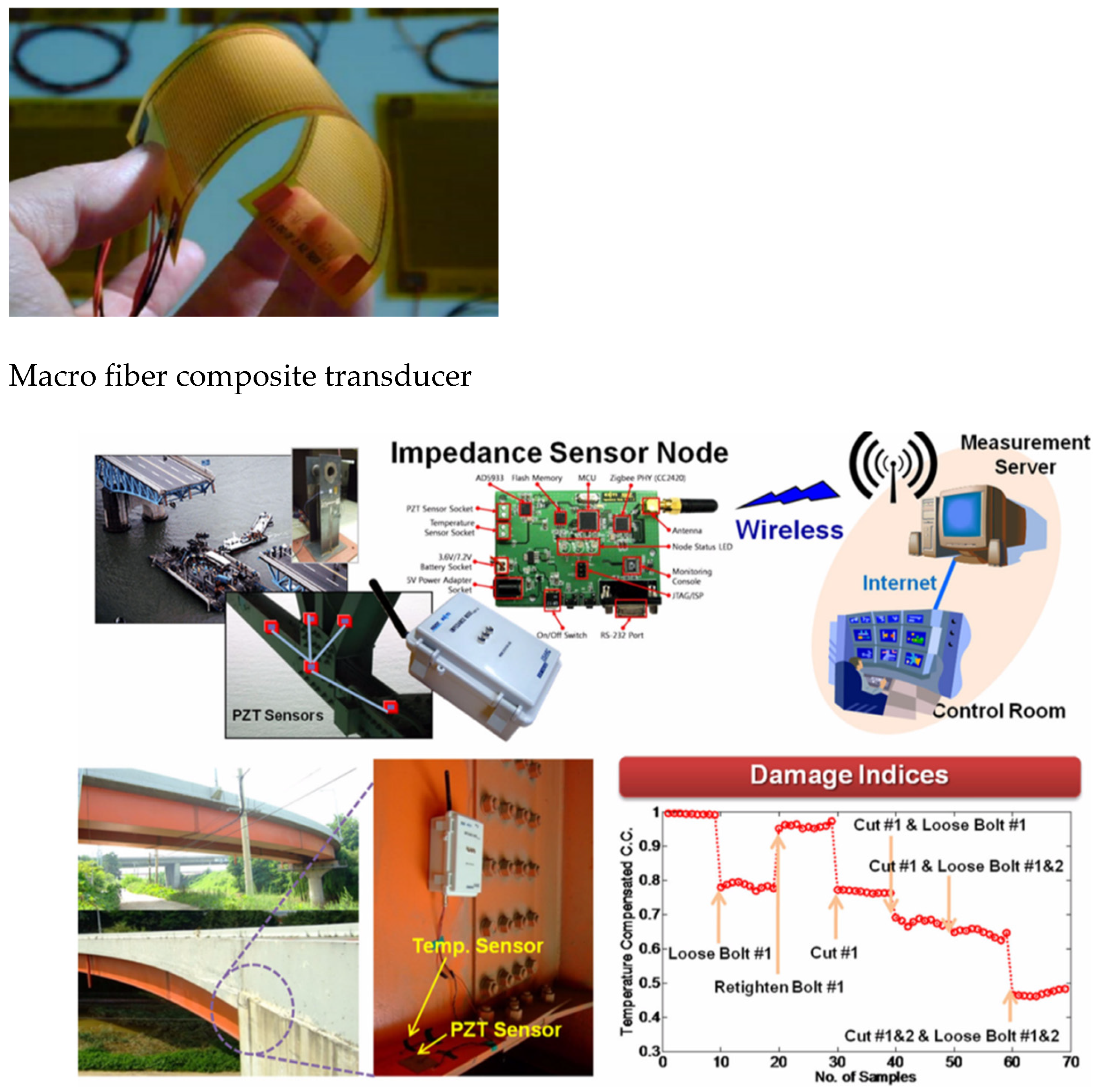{kind=link}
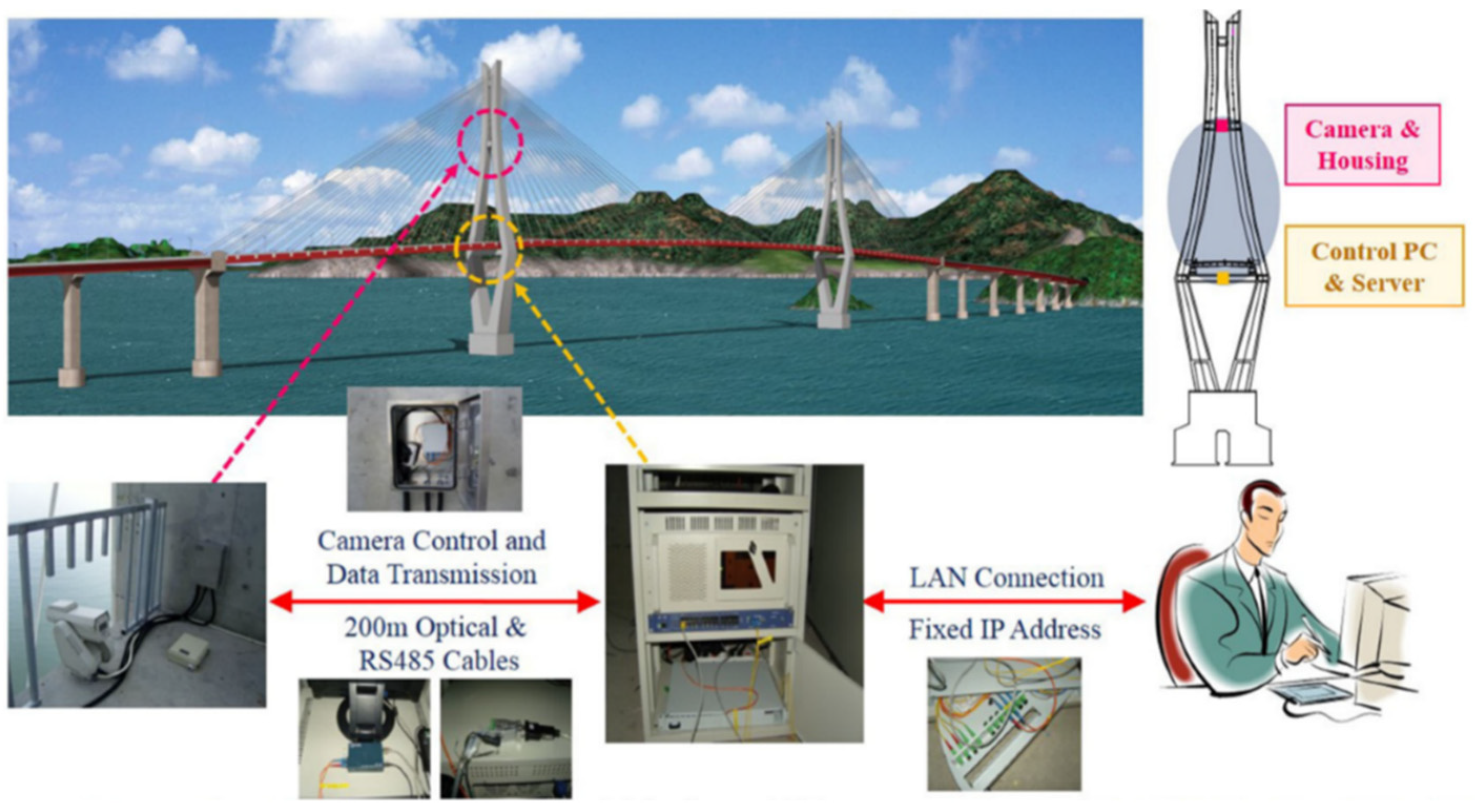{kind=link}
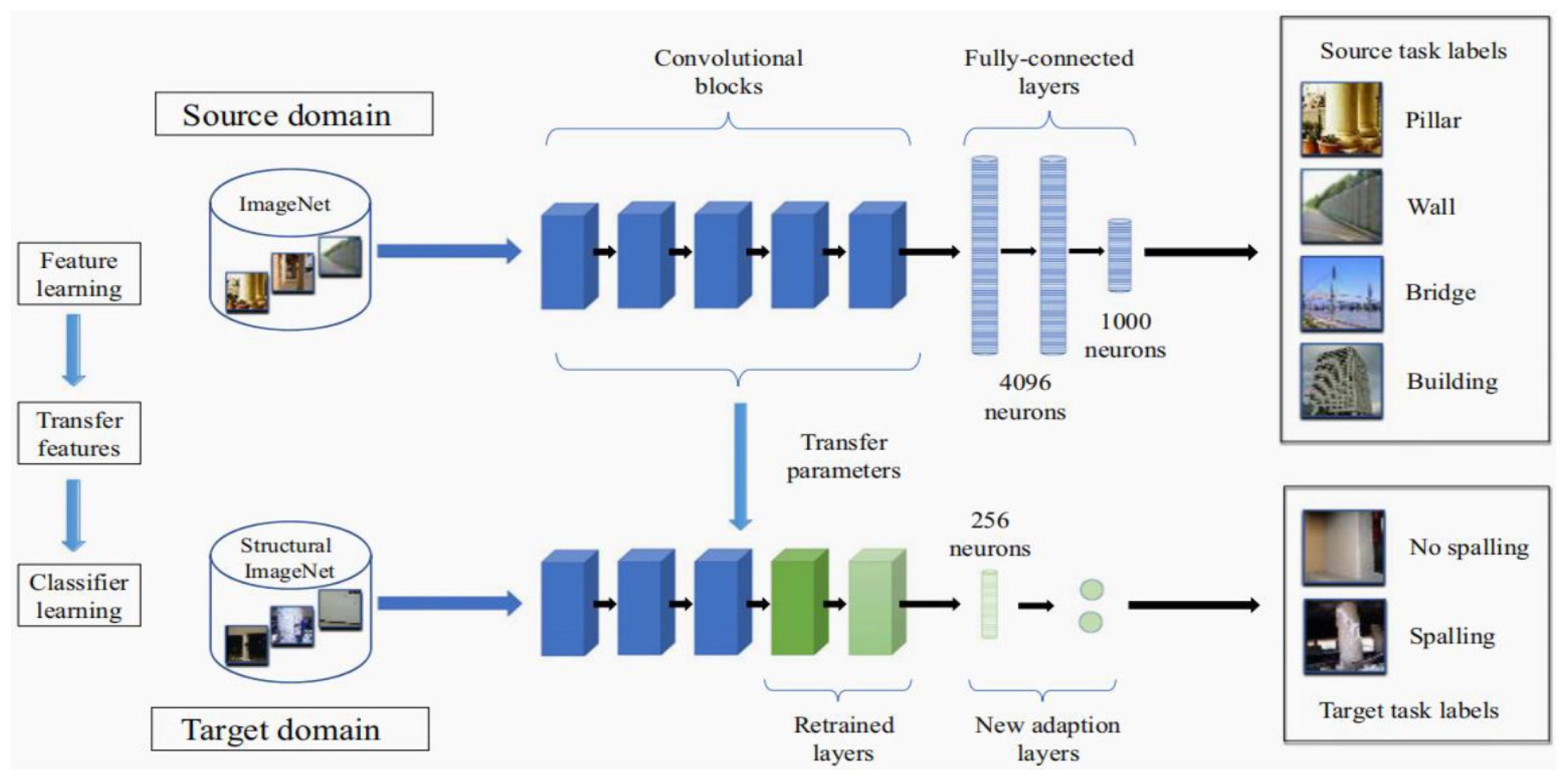{kind=link}
Figure 10.
Exoskeleton prototypes [144]. (a) Example of wearable connected devices. (b) device structures.
Figure 10.
Exoskeleton prototypes [144]. (a) Example of wearable connected devices. (b) device structures.

Figure 11.
Spider chart of influential performance [147].
Figure 11.
Spider chart of influential performance [147].

Figure 12.
Construction procedures loop [150].
Figure 12.
Construction procedures loop [150].

Figure 13.
(a) Automation elements tracking and locating in storage [157]; (b) UAV-RFID system signal processing flow chart [158].

Figure 14.
FBG strain gauge sensor on Tsing Ma bridge [169].
Figure 14.
FBG strain gauge sensor on Tsing Ma bridge [169].

Figure 15.
Impedance sensor node for damage detection on bridge [185].
Figure 15.
Impedance sensor node for damage detection on bridge [185].

Figure 16.
Vision-based monitoring system for cable stayed bridge [204].
Figure 16.
Vision-based monitoring system for cable stayed bridge [204].

Figure 17.
Learning based damage detection.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, K.; Meng, Q.; Kong, Q.; Zhang, X. Review on the Developments of Structure, Construction Automation, and Monitoring of Intelligent Construction. Buildings 2022, 12, 1890. https://doi.org/10.3390/buildings12111890
AMA Style
Liu K, Meng Q, Kong Q, Zhang X. Review on the Developments of Structure, Construction Automation, and Monitoring of Intelligent Construction. Buildings. 2022; 12(11):1890. https://doi.org/10.3390/buildings12111890
Chicago/Turabian StyleLiu, Kewei, Qingfei Meng, Qingzhao Kong, and Xihong Zhang. 2022. "Review on the Developments of Structure, Construction Automation, and Monitoring of Intelligent Construction" Buildings 12, no. 11: 1890. https://doi.org/10.3390/buildings12111890
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.