Frequency Shift of a SH-SAW Biosensor with Glutaraldehyde and 3-Aminopropyltriethoxysilane Functionalized Films for Detection of Epidermal Growth Factor



Abstract
:1. Introduction
2. Materials and Methods
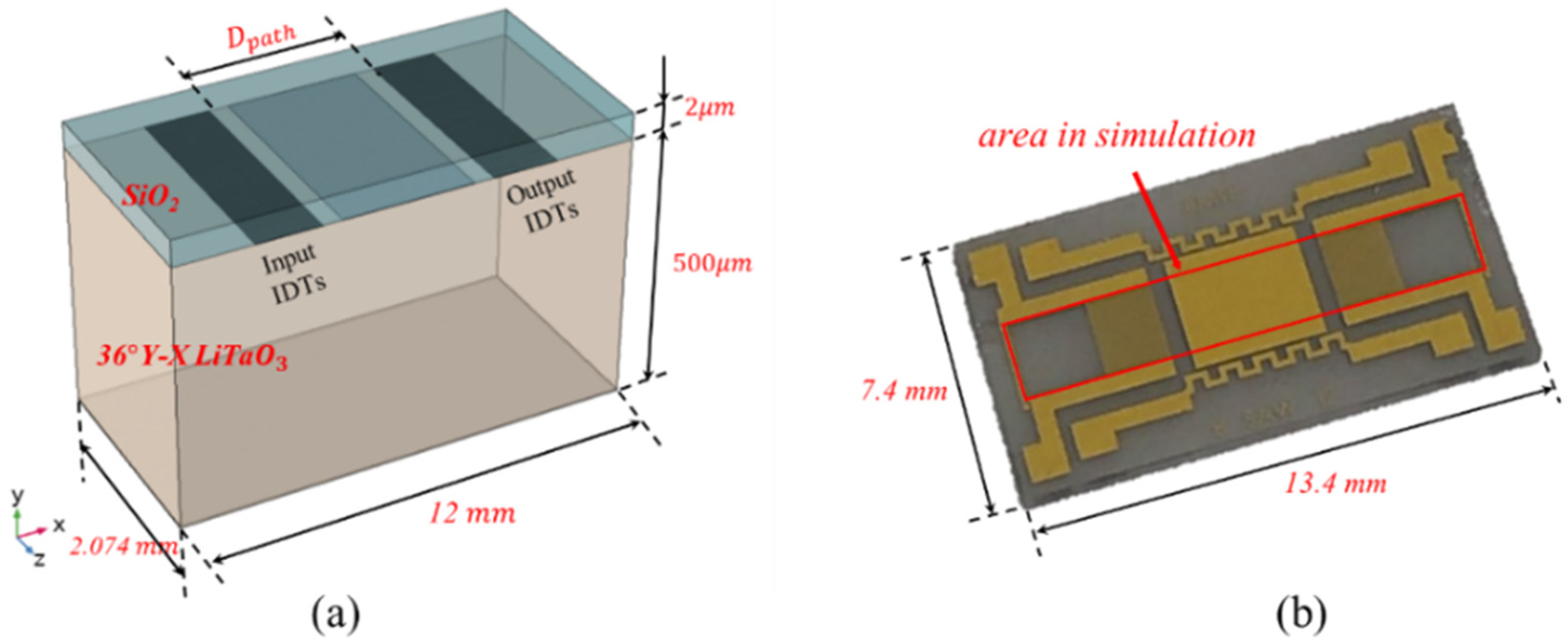
2.1. Simulation Method
2.2. Fabrication of SH-SAW Sensors
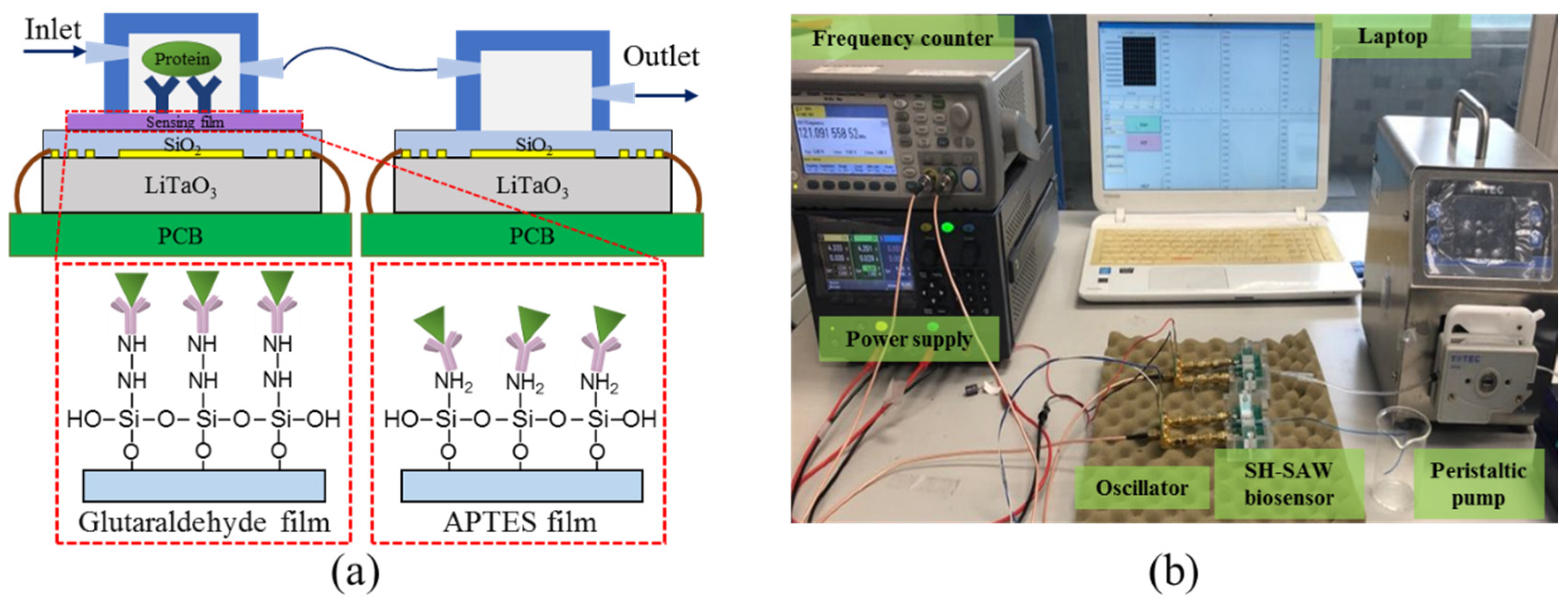
2.3. Surface Functionalization
2.4. SH-SAW Sensing System
3. Results and Discussion
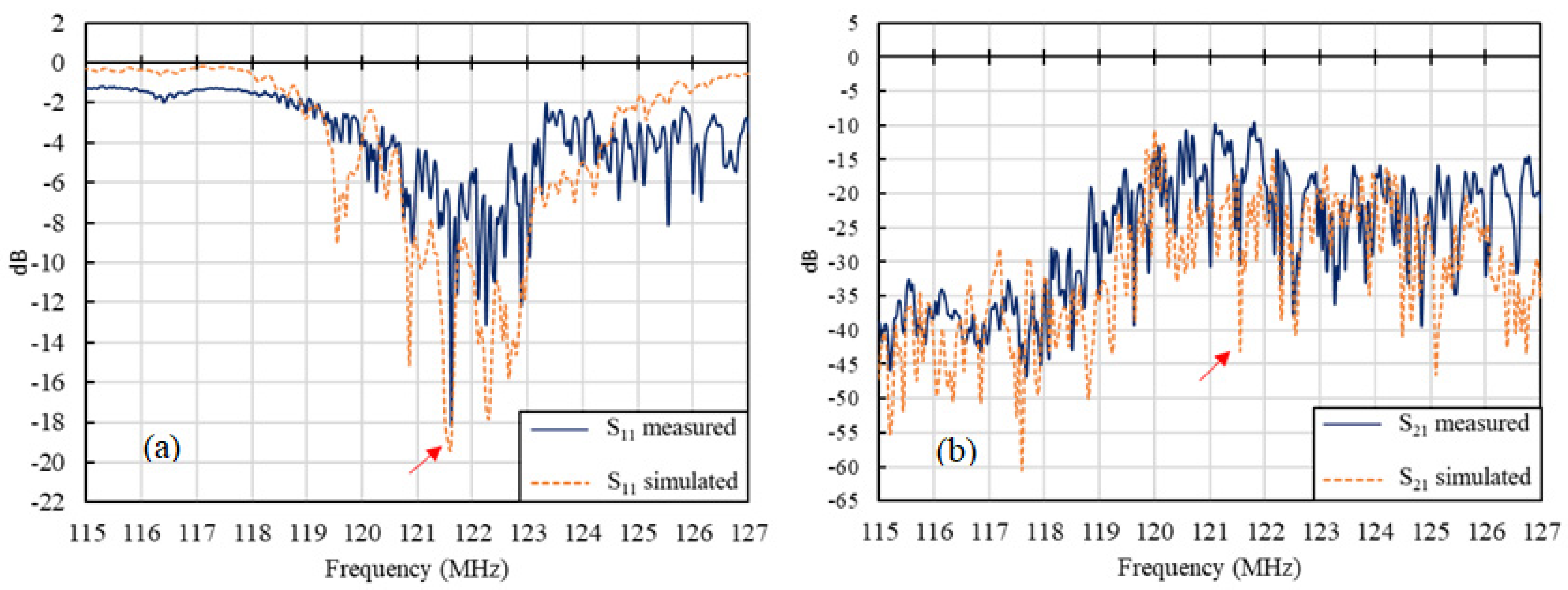
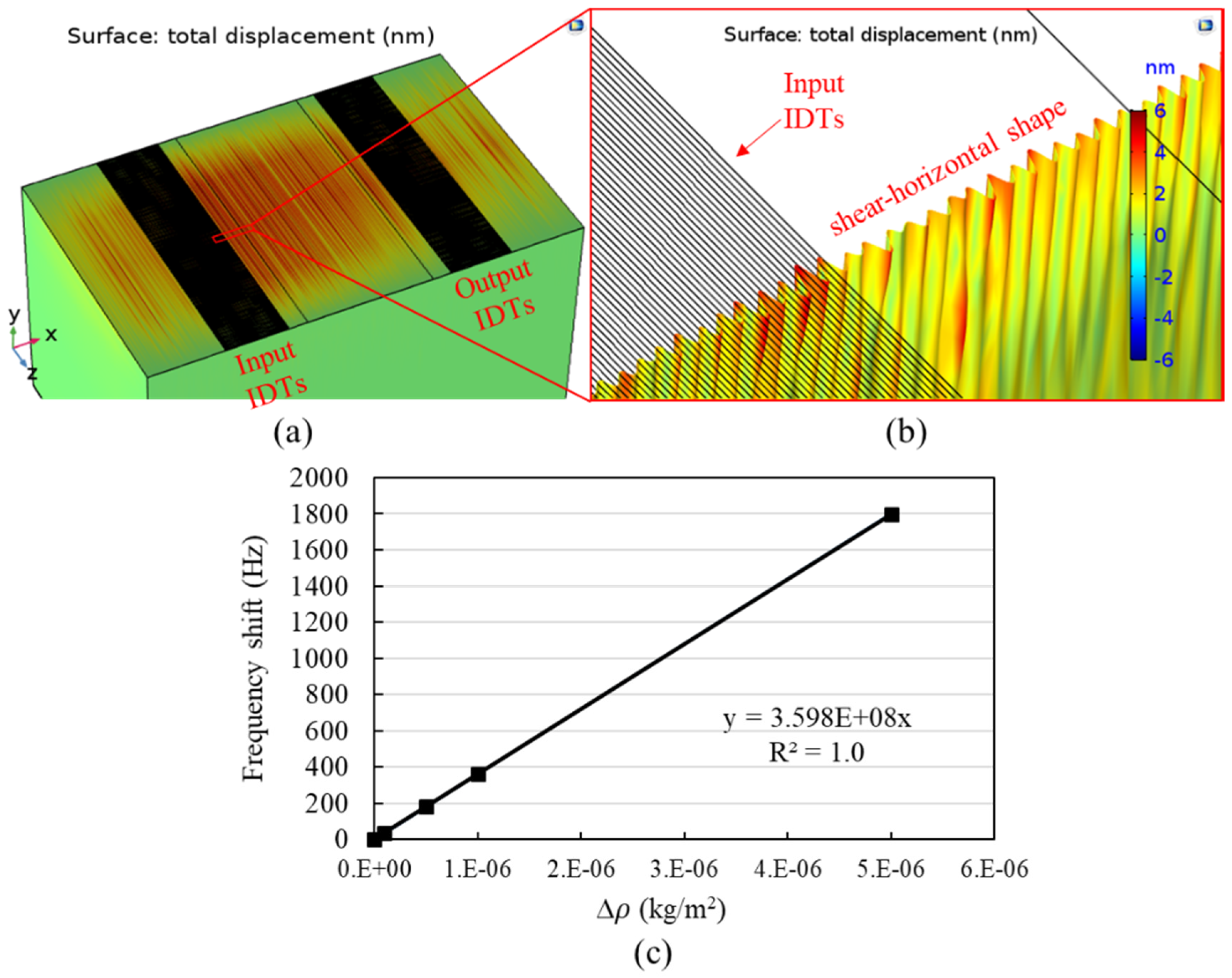
3.1. Numerical Analysis
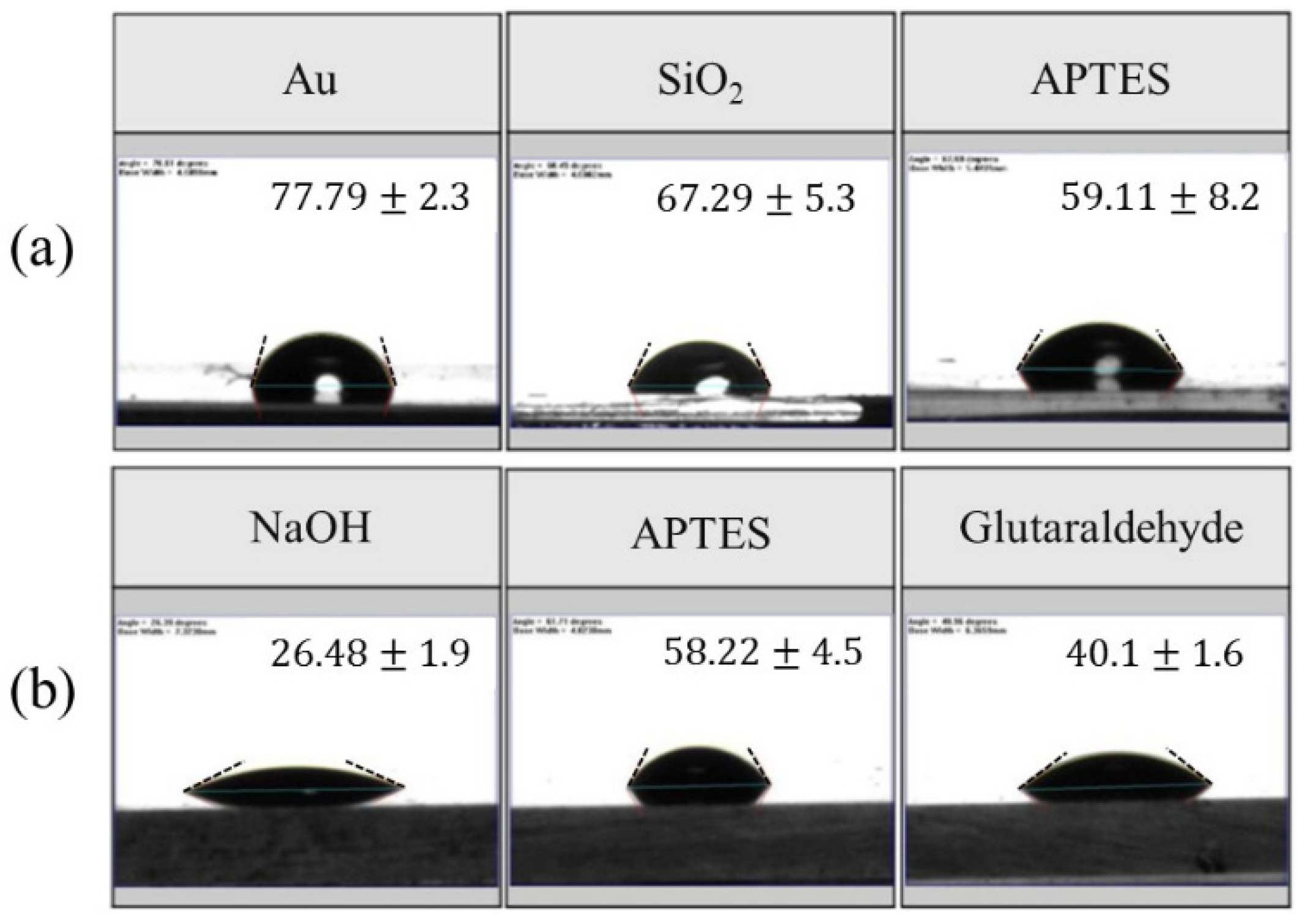
3.2. Surface Functionalization
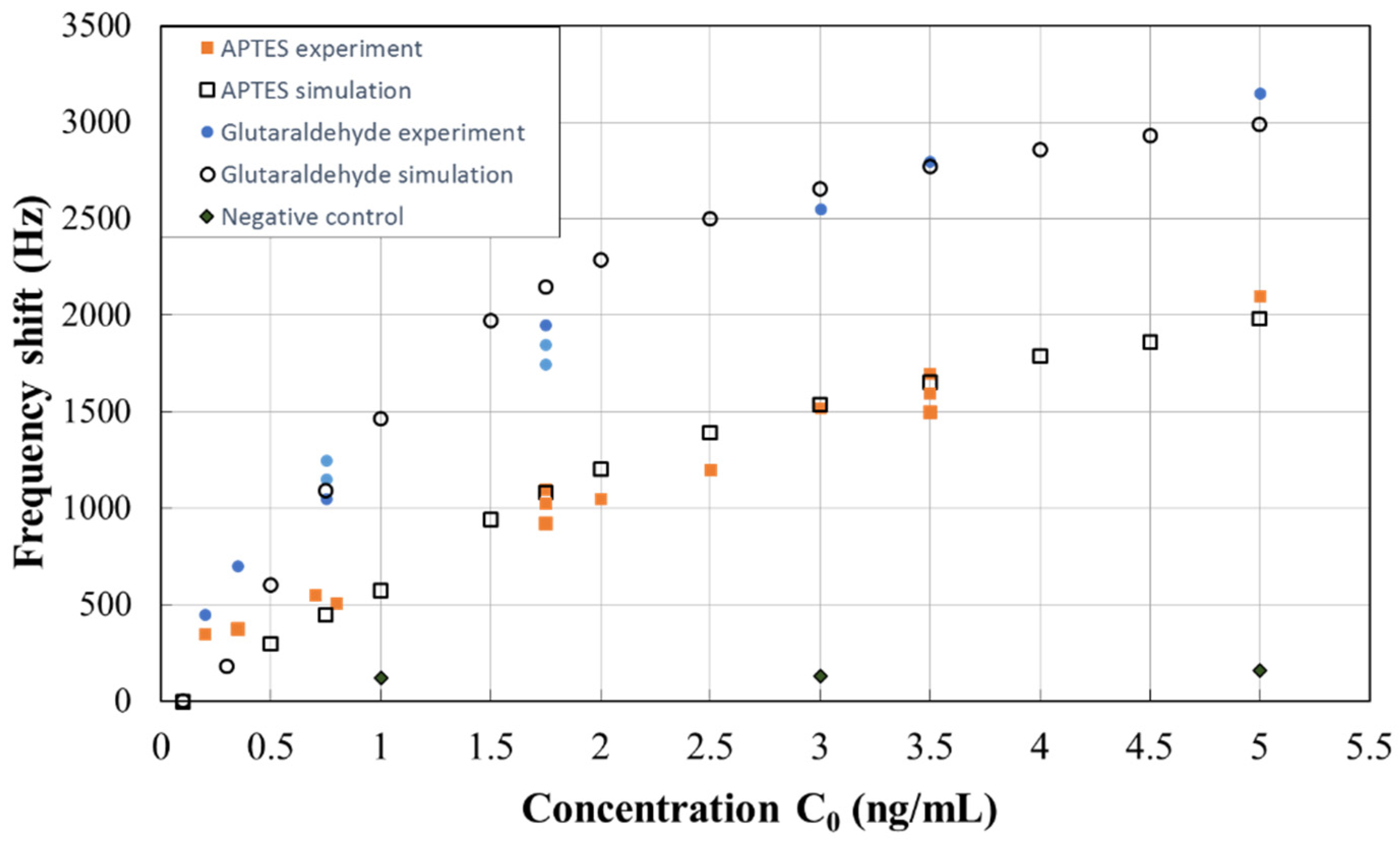
3.3. Response Frequency of a SH-SAW Biosensor with EGF Protein
3.4. Semi-Empirical Correlation Model for a SH-SAW Biosensor
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Du, L.; Wu, C.; Liu, Q.; Huang, L.; Wang, P. Recent advances in olfactory receptor-basedbiosensors. Biosens. Bioelectron. 2013, 42, 570–580. [Google Scholar] [CrossRef]
- White, R.; Voltmer, F. Direct piezoelectric coupling to surface elastic waves. Appl. Phys. Lett. 1965, 7, 314–316. [Google Scholar] [CrossRef]
- Voiculescu, I.; Nordin, A.N. Acoustic wave based MEMS devices for biosensing applications. Biosens. Bioelectron. 2012, 33, 1–9. [Google Scholar] [CrossRef]
- Ricco, A.; Martin, S.; Zipperian, T. Surface acoustic wave gas sensor based on film conductivity changes. Sens. Actuators 1985, 8, 319–333. [Google Scholar] [CrossRef]
- Tom-Moy, M.; Baer, R.L.; Spira-Solomon, D.; Doherty, T.P. Atrazine measurements using surface transverse wave devices. Anal. Chem. 1995, 67, 1510–1516. [Google Scholar] [CrossRef]
- Borodina, I.; Zaitsev, B.; Burygin, G.; Guliy, O. Sensor based on the slot acoustic wave for the non-contact analysis of the bacterial cells–Antibody binding in the conducting suspensions. Sens. Actuators B Chem. 2018, 268, 217–222. [Google Scholar] [CrossRef]
- Hur, Y.; Han, J.; Seon, J.; Pak, Y.E.; Roh, Y. Development of an SH-SAW sensor for the detection of DNA hybridization. Sens. Actuators A Phys. 2005, 120, 462–467. [Google Scholar] [CrossRef]
- Chang, K.; Pi, Y.; Lu, W.; Wang, F.; Pan, F.; Li, F.; Jia, S.; Shi, J.; Deng, S.; Chen, M. Label-free and high-sensitive detection of human breast cancer cells by aptamer-based leaky surface acoustic wave biosensor array. Biosens. Bioelectron. 2014, 60, 318–324. [Google Scholar] [CrossRef] [PubMed]
- Slobodnik Jr, A.J. Low diffraction loss-low spurious response LiTaO3 substrate for surface acoustic wave devices. Patents US4001767A, 1 April 1977. [Google Scholar]
- Chivukula, V.; Ciplys, D.; Shur, M.; Dutta, P. ZnO nanoparticle surface acoustic wave UV sensor. Appl. Phys. Lett. 2010, 96, 233512. [Google Scholar] [CrossRef]
- Jo, M.C.; Guldiken, R. Effects of polydimethylsiloxane (PDMS) microchannels on surface acoustic wave-based microfluidic devices. Microelectron. Eng. 2014, 113, 98–104. [Google Scholar] [CrossRef]
- Ten, S.; Hashim, U.; Gopinath, S.; Liu, W.; Foo, K.; Sam, S.; Rahman, S.; Voon, C.; Nordin, A. Highly sensitive Escherichia coli shear horizontal surface acoustic wave biosensor with silicon dioxide nanostructures. Biosens. Bioelectron. 2017, 93, 146–154. [Google Scholar] [CrossRef] [PubMed]
- Ippolito, S.J.; Kalantar-Zadeh, K.; Powell, D.A.; Wlodarski, W. A 3-dimensional finite element approach for simulating acoustic wave propagation in layered SAW devices. In Proceedings of the IEEE Symposium on Ultrasonics, Honolulu, HI, USA, 5–8 October 2003; pp. 303–306. [Google Scholar]
- Trivedi, S.; Nemade, H.B. Finite element simulation of a highly sensitive SH-SAW delay line sensor with SiO2 micro-ridges. Microsyst. Technol. 2018, 24, 3537–3547. [Google Scholar] [CrossRef]
- Du, X.; Fang, J.; Zhu, D.-M. Modified Sauerbrey equation: A facile method to quantitatively probe the conformation of isolated molecules at solid–liquid interfaces. Analyst 2018, 143, 3209–3216. [Google Scholar] [CrossRef]
- Hao, H.-C.; Yao, D.-J. A sensitive, rapid and specific technique for the detection of antigen-specific cells on shear horizontal surface acoustic wave (SH-SAW) sensors. In Proceedings of the IEEE Sensors, Waikoloa, HI, USA, 1–4 November; pp. 2117–2121.
- Yao, W.; Feng, D.; Bian, W.; Yang, L.; Li, Y.; Yang, Z.; Xiong, Y.; Zheng, J.; Zhai, R.; He, J. EBP50 inhibits EGF-induced breast cancer cell proliferation by blocking EGFR phosphorylation. Amino Acids 2012, 43, 2027–2035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, S.-J.; Saadi, W.; Lin, F.; Nguyen, C.M.-C.; Jeon, N.L. Differential effects of EGF gradient profiles on MDA-MB-231 breast cancer cell chemotaxis. Exp. Cell. Res. 2004, 300, 180–189. [Google Scholar] [CrossRef] [PubMed]
- Osborne, C.K.; Hamilton, B.; Titus, G.; Livingston, R.B. Epidermal growth factor stimulation of human breast cancer cells in culture. Cancer Res. 1980, 40, 2361–2366. [Google Scholar]
- Pesonen, K.; Alfthan, H.; Stenman, U.-H.; Viinikka, L.; Perheentupa, J. An ultrasensitive time-resolved immunofluorometric assay of human epidermal growth factor. Anal. Biochem. 1986, 157, 208–211. [Google Scholar] [CrossRef]
- van Setten, G.-B. Epidermal growth factor in human tear fluid: Increased release but decreased concentrations during reflex tearing. Current Eye Res. 1990, 9, 79–83. [Google Scholar] [CrossRef]
- Pfeiffer, P.; Nexø, E.; Bentzen, S.; Clausen, P.; Andersen, K.; Rose, C. Enzyme-linked immunosorbent assay of epidermal growth factor receptor in lung cancer: Comparisons with immunohistochemistry, clinicopathological features and prognosis. British J. Cancer 1998, 78, 96–99. [Google Scholar] [CrossRef]
- Sako, Y.; Uyemura, T. Total internal reflection fluorescence microscopy for single-molecule imaging in living cells. Cell Struct. Funct. 2002, 27, 357–365. [Google Scholar] [CrossRef] [Green Version]
- Vasudev, A.; Kaushik, A.; Bhansali, S. Electrochemical immunosensor for label free epidermal growth factor receptor (EGFR) detection. Biosens. Bioelectron. 2013, 39, 300–305. [Google Scholar] [CrossRef] [PubMed]
- Shin, D.-M.; Shin, Y.-C.; Lee, J.-H.; Kim, T.-H.; Han, D.-W.; Kim, J.-M.; Kim, H.K.; Kim, K.; Hwang, Y.-H. Highly sensitive detection of epidermal growth factor receptor expression levels using a capacitance sensor. Sens. Actuators B Chem. 2015, 209, 438–443. [Google Scholar] [CrossRef]
- Trivedi, S.; Nemade, H.B. Finite element simulation of Love Wave based SAW delay line using COMSOL multiphysics. In Proceedings of the Excerpt from the proceedings of the COMSOL conference in Pune (COMSOL), Pune, India, 29–30 August 2015. [Google Scholar]
- Trivedi, S.; Nemade, H.B. Coupled resonance in SH-SAW resonator with S1813 micro-ridges for high mass sensitivity biosensing applications. Sens. Actuators B Chem. 2018, 273, 288–297. [Google Scholar] [CrossRef]
- Kovacs, G.; Anhorn, M.; Engan, H.; Visintini, G.; Ruppel, C. Improved material constants for LiNbO/sub 3/and LiTaO/sub 3. In Proceedings of the IEEE symposium on ultrasonics, Honolulu, HI, USA, 4–7 December 1990; pp. 435–438. [Google Scholar]
- Zhang, G. Nanostructure-enhanced surface acoustic waves biosensor and its computational modeling. J. Sens. 2009, 2009, 1–11. [Google Scholar] [CrossRef]
- Shimizu, Y. Current status of piezoelectric substrate and propagation characteristics for SAW devices. Jpn. J. Appl. Phys. 1993, 32, 2183. [Google Scholar] [CrossRef]
- Li, Y.; Bou Matar, O. Convolutional perfectly matched layer for elastic second-order wave equation. J. Acoust. Soc. Am. 2010, 127, 1318–1327. [Google Scholar] [CrossRef]
- Manenti, R. Surface Acoustic Wave Resonators for Quantum Information. Master’s Thesis, University of Milano, Milano, Italy, 2013. [Google Scholar]
- Gubala, V.; Siegrist, J.; Monaghan, R.; O’Reilly, B.; Gandhiraman, R.P.; Daniels, S.; Williams, D.E.; Ducrée, J. Simple approach to study biomolecule adsorption in polymeric microfluidic channels. Anal. Chim. Acta 2013, 760, 75–82. [Google Scholar] [CrossRef]
- Lim, S.K.; Perrier, S.; Neto, C. Patterned chemisorption of proteins by thin polymer film dewetting. Soft Matter 2013, 9, 2598–2602. [Google Scholar] [CrossRef] [Green Version]
- Joh, T.; Itoh, M.; Katsumi, K.; Yokoyama, Y.; Takeuchi, T.; Kato, T.; Wada, Y.; Tanaka, R. Physiological concentrations of human epidermal growth factor in biological fluids: Use of a sensitive enzyme immunoassay. Clin. Chim. Acta 1986, 158, 81–90. [Google Scholar] [CrossRef]
- Vashist, S.K.; Dixit, C.K.; MacCraith, B.D.; O’Kennedy, R. Effect of antibody immobilization strategies on the analytical performance of a surface plasmon resonance-based immunoassay. Analyst 2011, 136, 4431–4436. [Google Scholar] [CrossRef]
- Wang, Z.-H.; Jin, G. Covalent immobilization of proteins for the biosensor based on imaging ellipsometry. J. Immunol. Methods 2004, 285, 237–243. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Settings |
|---|---|
| Designed resonance wavelength (λc) | 34 |
| SH-SAW velocity | 4100–4212 m/s [30] |
| Number of fingers | 50 pairs |
| Finger width | 8.5 |
| Thickness of electrodes | 120 nm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo, X.-C.; Li, J.-Y.; Lee, M.-T.; Yao, D.-J. Frequency Shift of a SH-SAW Biosensor with Glutaraldehyde and 3-Aminopropyltriethoxysilane Functionalized Films for Detection of Epidermal Growth Factor. Biosensors 2020, 10, 92. https://doi.org/10.3390/bios10080092
Lo X-C, Li J-Y, Lee M-T, Yao D-J. Frequency Shift of a SH-SAW Biosensor with Glutaraldehyde and 3-Aminopropyltriethoxysilane Functionalized Films for Detection of Epidermal Growth Factor. Biosensors. 2020; 10(8):92. https://doi.org/10.3390/bios10080092
Chicago/Turabian StyleLo, Xue-Chang, Jen-Yu Li, Ming-Tsang Lee, and Da-Jeng Yao. 2020. "Frequency Shift of a SH-SAW Biosensor with Glutaraldehyde and 3-Aminopropyltriethoxysilane Functionalized Films for Detection of Epidermal Growth Factor" Biosensors 10, no. 8: 92. https://doi.org/10.3390/bios10080092