1. Introduction
Wearable robotic devices—both exosuits and exoskeletons—show potential benefits in assisting humans in walking, reducing metabolism, and enhancing endurance. The design concept of wearable robotic devices is to provide appropriate joint torques and timing based on biomechanical gait analysis [
1,
2]. Both passive and active devices can contribute to a reduction in energy consumption.
Along with the advantages of exoskeletons comes the weight of systems and constraints on the human body, which results in uncomfortable sensations. Therefore, researchers are interested in exploring additional methods to significantly reduce energy expenditure to compensate for negative influences. In addition to structural improvement, control strategies have been a hot topic of research, essentially focusing on two areas: (1) personalized optimization using human-in-the-loop optimization algorithms [
3,
4,
5] and (2) muscle dynamics [
6], which are employed to adjust control parameters. Since the dynamics of human joints vary with the mode of locomotion, e.g., walking on level ground, a slope, or stair ascent/descent [
7,
8,
9], accurate locomotion mode identification and real-time control strategies pose challenges with respect to the use of wearable devices.
Multiple sensors are applied to locomotion mode recognition. Sensors currently used for exoskeleton pattern detection systems can be categorized into three major groups: mechanical, biosignal, and vision sensors.
Many different strategies have been employed using mechanical sensors, such as the use of load cells [
10] and inertial measurement units (IMUs) [
11,
12]. These methods predict locomotion modes by threshold or machine learning according to a human state, such as limb motions or heel contact forces [
13]. Mechanical sensors are characterized by convenient, low cost, and relatively good recognition performance. However, mechanical sensors have a step delay, leading to uncomfortable sensations and increased risks of falls. Surface electromyography (sEMG) represents muscle activation and is widely applied in wearable devices for intention recognition [
14]. The features of sEMG in the time or frequency domain are often extracted and input to several pretrained classifiers for mode identification. Compared to the responses of mechanical sensors to movements, sEMG signals precede limb motion by 20–150 ms [
7,
15], which can compensate for the delay of the system. sEMG is also associated with uncertainties, such as those relating to the electrode position, crosstalk, and noise, so measurements must be taken from multiple muscles to ensure a reasonable recognition rate. At present, the combination of mechanical and biosignal sensors is the most widely used method to improve the accuracy of recognition. Studies have shown that the fusion of mechanical and biosignal sensors can significantly improve the classification of gait modes [
7,
16].
Recently, the use of vision sensors has been proposed for the identification of terrain. Depth images are employed to detect user movement intent or to recognize real-life environmental context through edge detection or 3D point cloud classification [
17,
18]. The authors of a previous study achieved reliable confidence estimation, reporting a decision result 0.6 to 4 s ahead of the motion intention [
19]. Vision sensors are generally large, and this method requires a great deal of computational power. In addition, visual sensors can only be used to recognize terrain (such as level ground, slopes, and stairs) and cannot consider the impact of tasks (such as speed and load) on assistive strategies.
Many experimental studies have pointed out that both kinematics and kinetics change considerably as speed and load change [
9,
20,
21]. Therefore, it is critical to adopt different control strategies for corresponding tasks on specific terrain types. Spatiotemporal gait parameters during walking have been extensively studied in both healthy and pathological populations [
22]. Walking speed is one of the most important parameters characterizing people’s daily mobility [
23] and has been recognized as a proxy measure of ambulation quality. Consequently, speed recognition is a crucial parameter with respect to control strategies for assistive exoskeletons. Gait speed estimation is widely used in clinical applications to analyze the characteristics of walking-related diseases. Another central application area for speed estimation is in sports, where devices like smart watches are employed to predict the speeds for professional athletes or runners. The use of global navigation satellite systems is a highly accurate method for speed measurement [
24]. These systems need to be used outside and away from tall buildings. Furthermore, communicating with satellites consumes a considerable amount of power, limiting operating time. Due to the low power consumption and portable characteristics of electrical sensors, inertial sensor-based methods have been developed for speed estimation [
22,
25]. Algorithms using inertial sensors to estimate walking speed can be grouped into two categories: black-box models based on machine learning [
26] and human gait models [
23].
Similar to walking speed, it has been demonstrated that carrying loads significantly affect human gait biomechanics [
27,
28]. Much of the current load carriage research has concentrated on the fundamental tasks of military personnel. Previous research has shown that carrying loads can impact the spatiotemporal parameters of human gait and influence the efficiency and safety of movement, increasing the risk of musculoskeletal injury [
29,
30]. Although the physiology and biomechanics of load-bearing carriage properties have been characterized [
31], few teams have studied the identification of carriage weights for assistive exoskeletons. Weight can be measured initially, but such measurements are impossible during a mission, such as a march. Therefore, it is necessary to recognize load carriage in real time and provide an appropriate control strategy.
In order to assist human walking more efficiently and naturally, the exoskeleton must consider the modes and tasks of gait in the control strategies. An intuitive method is to utilize different control strategies for different gait movements. However, human walking parameters vary significantly based on terrains, speeds, and loads. Up to this point, the primary focus of most exoskeletons has been on terrain recognition [
32]. This is mainly because the open-source dataset of human lower limb biomechanics emphasizes gait analysis [
8,
9] rather than the control strategies of exoskeletons. To our best knowledge, only one study has addressed the effect of walking tasks [
6], but it only focused on speeds.
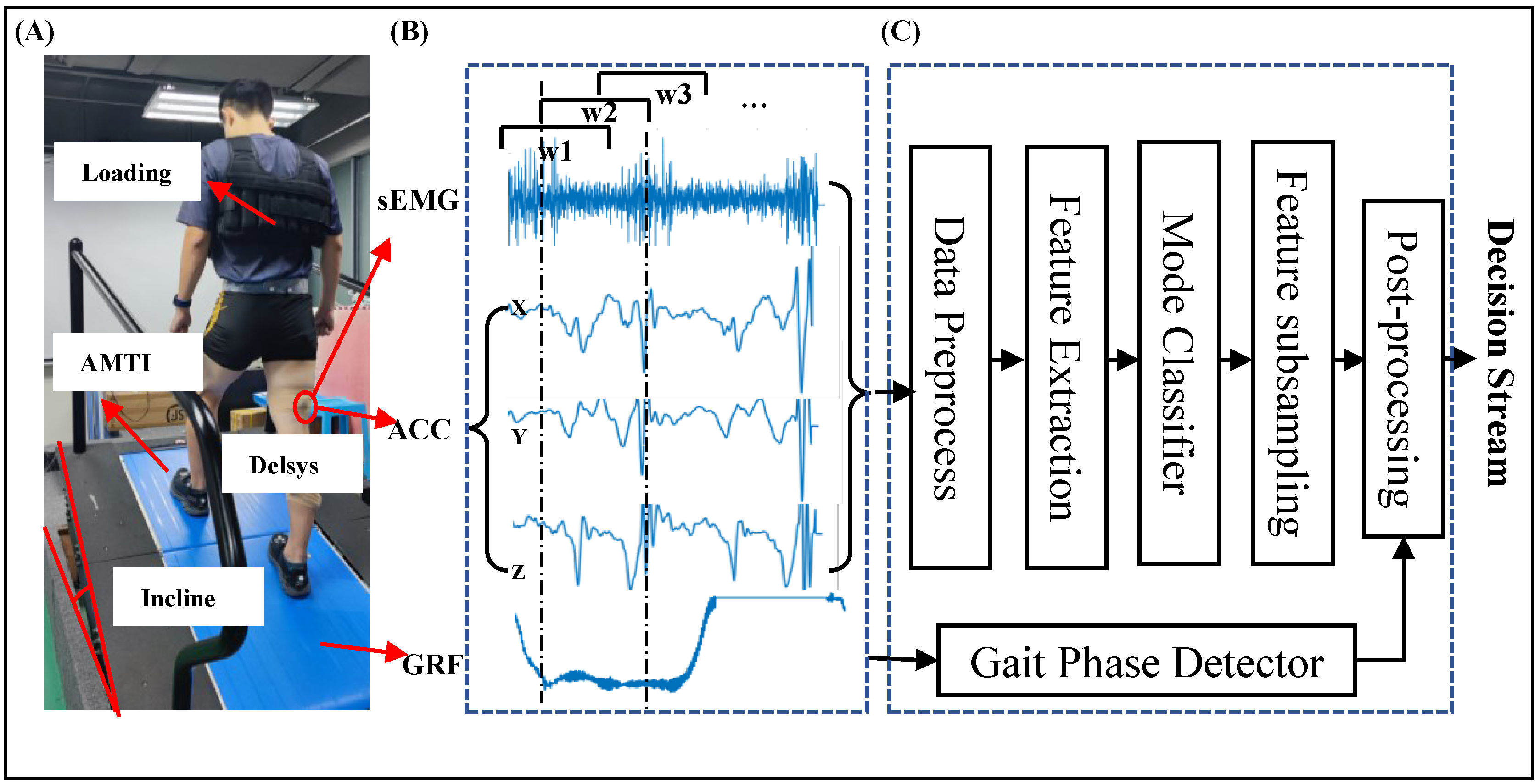
Accordingly, the objective of this study was to achieve the continuous recognition of locomotion modes (level/incline) and tasks (speed/load) through the fusion of neuromuscular–mechanical data for assistive exoskeletons. We formulated two hypotheses: (1) that combining accelerations (ACCs) and sEMG signals would prove effective for recognizing both mode and task, and (2) that incorporating a greater number of features would lead to higher estimation accuracy. To achieve this goal, we gathered a comprehensive dataset of human gait data from injury-free adult participants across various locomotion modes and tasks. This dataset served as the foundation for investigating the optimal algorithm, feature combinations, window length, and window increment. Furthermore, we conducted an assessment of the algorithm’s robustness, considering practical factors.
3. Results
Both the classifier and the design parameters had a substantial impact on recognition accuracy.
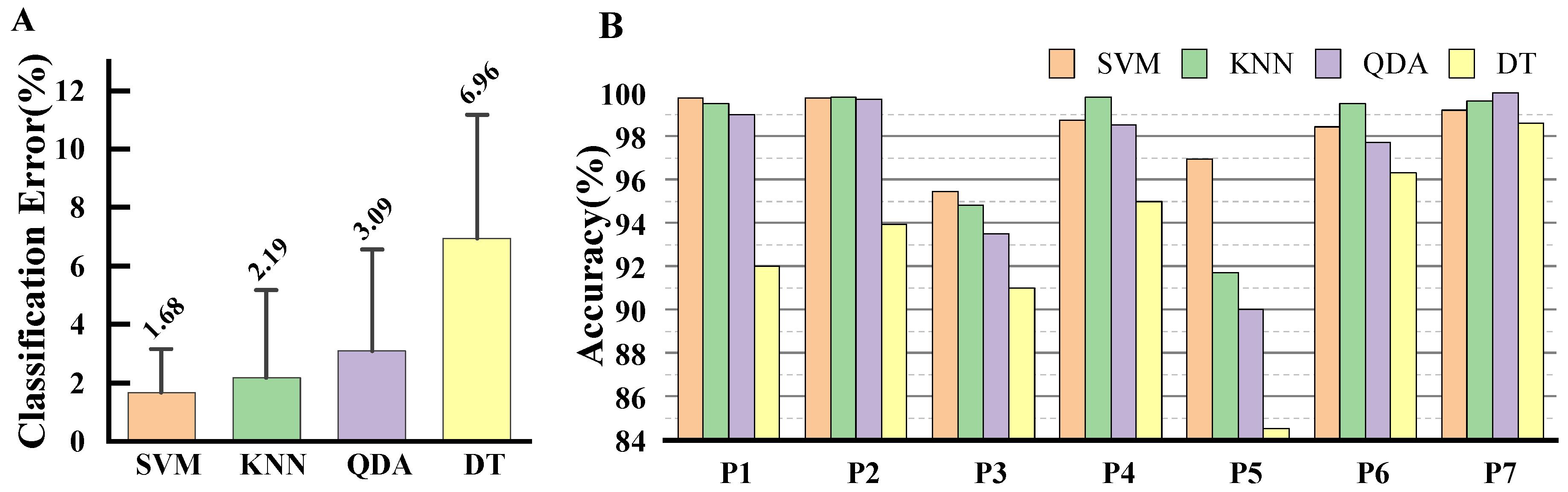
Figure 2 displays the classification performance of classifiers using an RMS, WL, and ACCs feature set with an analysis window of 140 and an increment of 10. SVM exhibited the lowest classification error, followed by KNN, QDA, and DT, with average error rates of 1.68%, 2.19%, 3.09%, and 6.96%, respectively. However, classifier performance was inconsistent and varied among participants. For instance, in the case of P2, P4, P6, and P7, KNN demonstrated better estimation accuracy than SVM. Among the results for P5, SVM was the sole classifier to achieve a superior result of 96.94%. Given that SVM maintained consistent accuracy across all participants’ tests, ranging form 95.46% to 99.75%, the SVM classifier was selected for the remainder of this study.
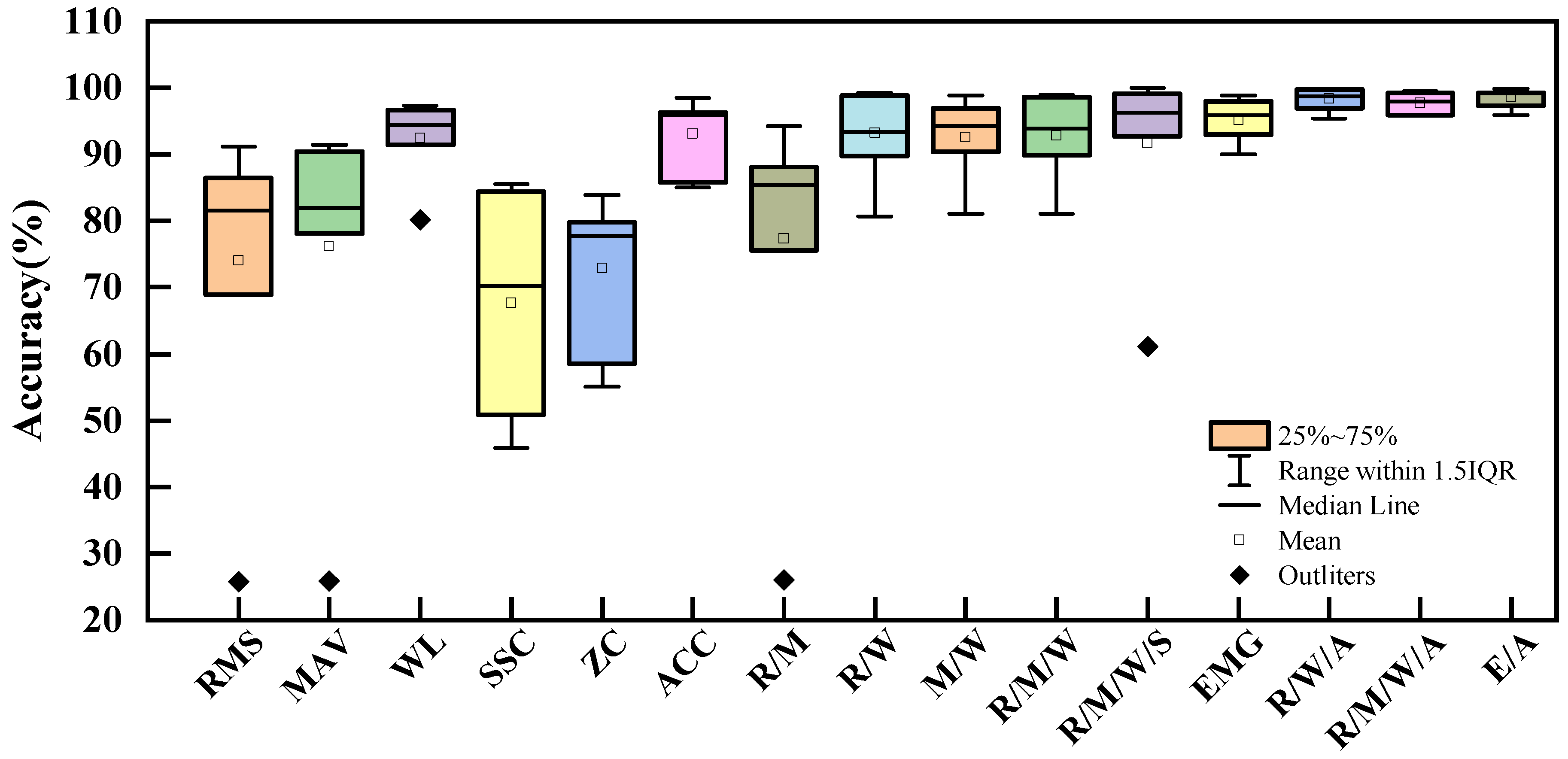
Figure 3 shows the influence of feature and feature combinations on classification accuracy when the SVM algorithm was employed to classify eight channels of data with 140 length of analysis window and 10 window increments. The definitions of each of these features are shown in
Table 2. Regarding single signal features, WL achieved the highest accuracy in mode and task recognition (92.51%), while SSC had the lowest accuracy (67.63%). It is worth noting that RMS, MAV, and WL all had outliers at 25.73%, 25.90%, and 80.13%, respectively, all from P7. The ACCs feature also yielded relatively good results with an accuracy of 93.09%. The combination of features improved the classification accuracy. Interestingly, the accuracy of all feature combinations (five features of EMG and ACCs) was not the best (98.57%). The best results were obtained with the feature set of RMS, WL, and ACCs (98.32%). In other words, adding features may potentially decrease estimation accuracy. The accuracies of R/W, R/M/W, R/M/W/S feature set were 93.20%, 92.81%, and 91.63%, respectively. The impact of ACCs on the classification accuracy is detailed in
Table 4. No significant differences were found between non-ACCs and ACCs feature sets. Overall, ACCs features improved accuracy except for R/W/A of P3, R/M/W/A of P1, and P3. Considering that the feature matrix of E/A had 64 dimensional while R/W/A had 40, and the difference in accuracy between the two sets was small (0.25%), R/W/A was selected for the algorithm, balancing response time and accuracy.
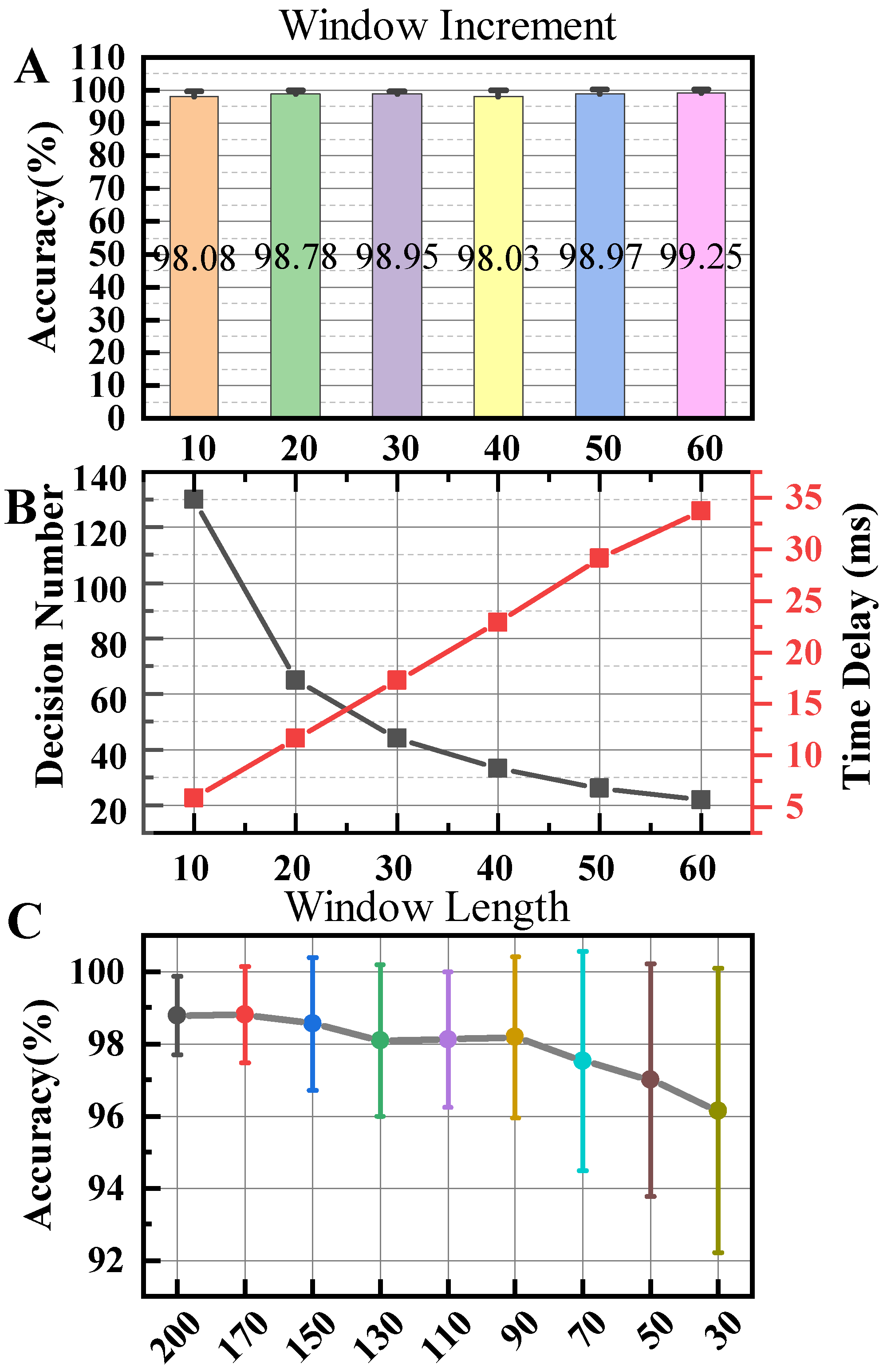
The effects of window increment are displayed in
Figure 4 when the SVM algorithm was utilized to classify eight channels of data using a 200 ms window length and R/W/A feature set. Window increments had a minimal effect on the classification accuracy. The highest accuracy achieved was 99.25% when the increment was 60, while the lowest was 98.03% when the increment was 40. The most significant impact of window increments was on the number of decisions made, which directly affected the system’s decision delay. Decision points were counted at the highest speed for each participant within a gait cycle. Furthermore, the system selected the minimum decision count among all participants, which corresponded to the maximum decision delay, as displayed in
Table 5. This process ensured that the system worked for everyone. Since there were also hardware delays, such as data transfer delays, the system needed to ensure that the decision delay did not exceed 15 ms. Considering the system delay, a window increment with higher accuracy (increment = 20) was chosen for the algorithm.
Figure 4 shows the effects of window length on classification accuracy. As the length decreased, the estimation accuracy generally showed a downward trend. The classifier produced favorable results within the window length range of 90 to 200 with the highest performance observed at a length of 170, reaching 98.79%. A linear correlation between accuracy and window length was observed in the range of 30 to 90.
Table 6 contains the classification accuracy for each participant. The reduction in features and the enhancement of computer computing power minimized the impact of changes in window length on decision delay. Furthermore, there were no significant differences observed between window lengths.
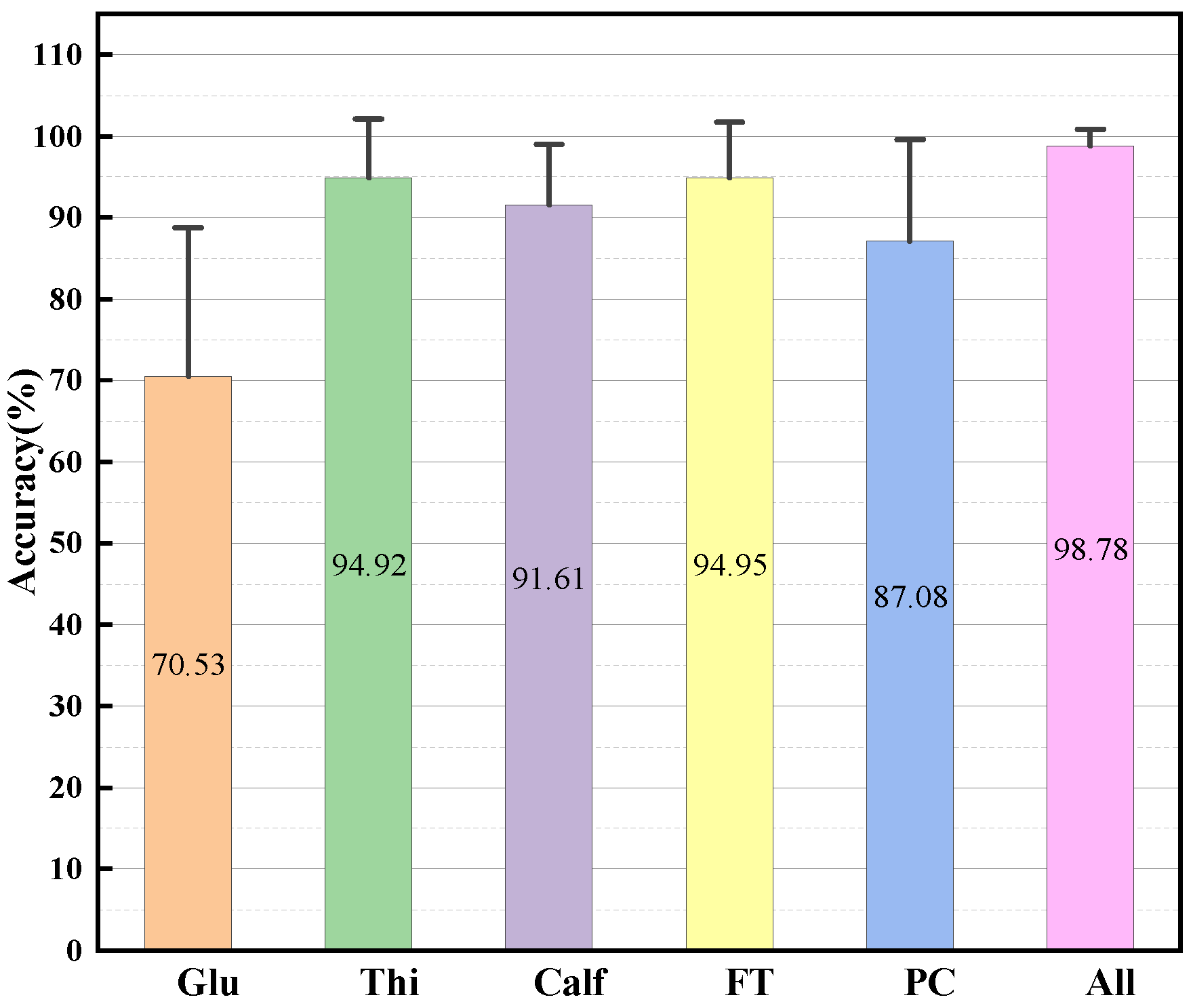
The exploration of SVM algorithm robustness was performed as a separate step with a window length of 140, an increment of 10, and the R/W/A feature set. For this process, participants P1, P2, P4, and P5 were selected, and the statistical results are depicted in
Figure 5. The anterior thigh muscles, namely RF, VL, and VM, achieved the highest accuracy of 94.95%, while Glu obtained the lowest accuracy at 70.53%. When considering only the posterior calf muscles, GAS and SOL, the accuracy was 87.08%. Upon adding TA, the accuracy improved to 91.61%. However, this improvement was not consistent for everyone, as P2’s accuracy increased from 94.21% to 97.71%.
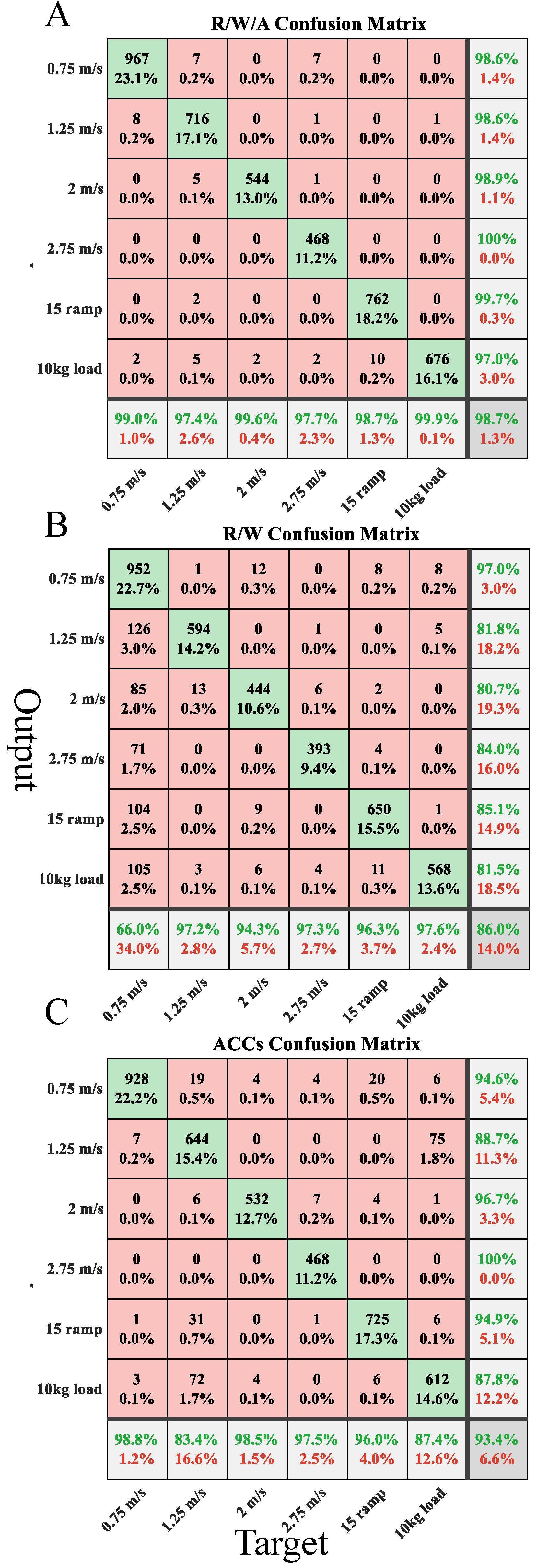
According to the results, the SVM classification algorithm was selected for locomotion mode and speed estimation with the R/W/A feature set, a window length of 170, and an increment of 20. The confusion matrices for R/W/A, ACCs, and R/W are displayed in
Figure 6. Analysis of the confusion matrix reveals that acceleration signals were advantageous in recognizing speeds, but they struggled to identify the load task accurately. Recognition accuracy for a 10 kg load and a speed of 1.25 m/s reached 87.4% and 83.4%, respectively. Within the R/W feature set, the lowest recognition accuracy was recorded at 66.0% for a speed of 0.75 m/s. In the R/W/A feature set, all tasks achieved commendable recognition rates ranging from 97.4% to 99.9%.
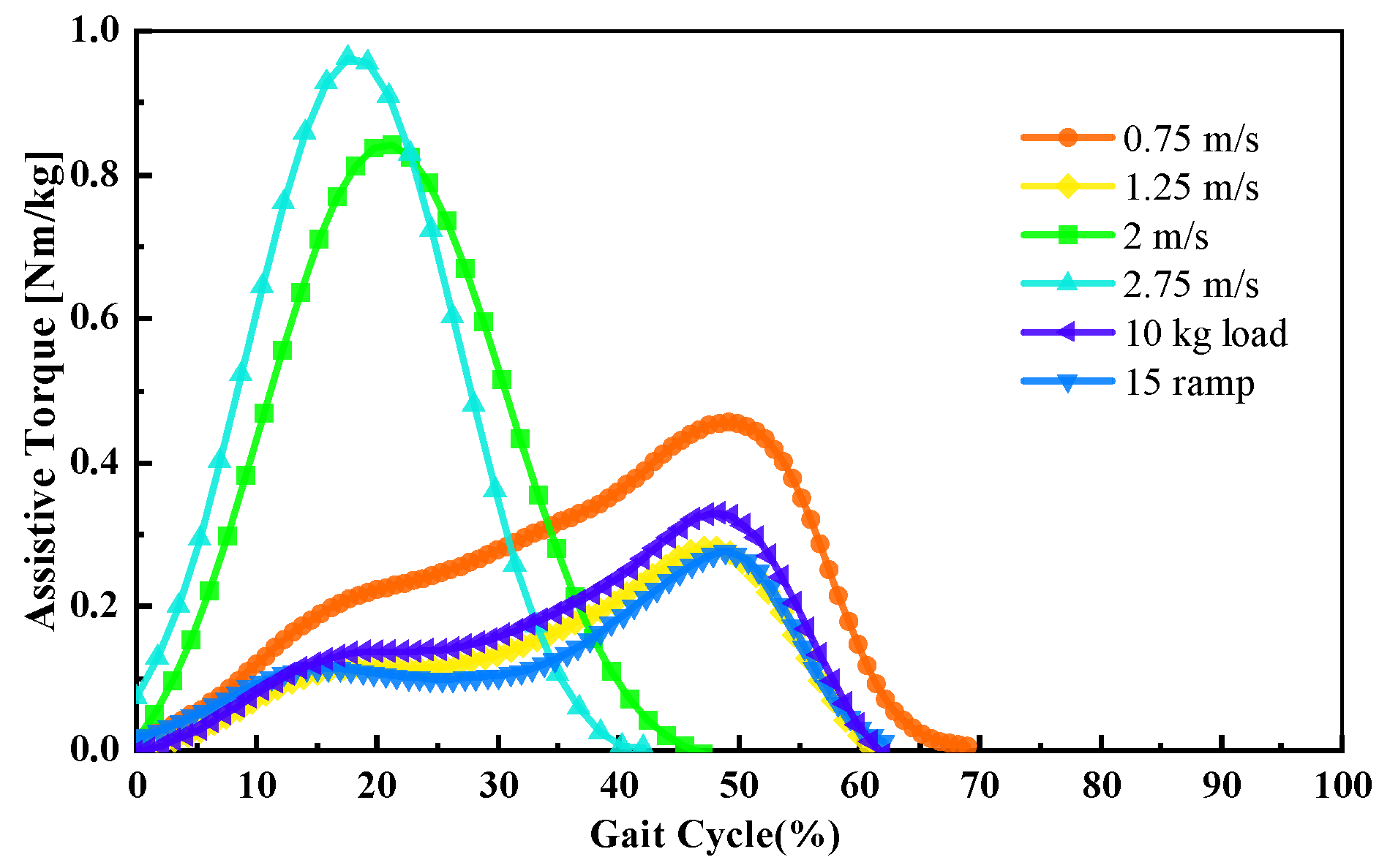
Figure 7 shows an instance of the identification and decision-making results for P1. The lines represent the desired assistive torque that the ankle exoskeleton should supply, while the dots represent the decision streams made by the system. The assistive torque functions were acquired by fitting 0.2 times the ankle biological torque curves in Gaussian form. The results revealed that the minimum number of decisions reached 32 at a speed of 2.75 m/s. This indicates that the system could provide adequate decisions for continuous control.
4. Discussion
The flexibility of exoskeletons in real-life scenarios is limited, which is primarily due to various environmental contexts and the complexity of human locomotion tasks. The most decisive factor in determining the operation mode of gait assistance is generally believed to be the terrain, including level walking, stair climbing, and ramp ascent [
41]. However, human walking parameters also exhibit significant variability in different motor tasks, which many studies tend to overlook. In this study, an interface based on sEMG-ACCs signal fusion was developed, which could accurately classify a variety of locomotion modes (level/incline) and tasks (speed/load). Furthermore, the model exhibited high robustness and could still yield favorable results even with only three thigh muscles. Generally, joint sensors and IMUs data are processed by a machine learning or threshold-based method to recognize the situation [
42]. This study adopted a fusion method of sEMG and acceleration signals, achieving accurate results in locomotion modes and tasks. By incorporating the biosensor, we eliminated the one-step delay [
32]. Compared to the fusion of sEMG and ground reaction forces used by Huang [
7], Kyeong [
15], and others, the utilization of sEMG and acceleration signals improved the range and accuracy of recognition. The phase-dependent classifiers, as adopted by Kyeong in their study, were not employed in this research for two primary reasons. Firstly, the sEMG signals in a gait cycle exhibited considerable variation, which may lead to feature overlap and, consequently, reduced recognition accuracy. The phase-dependent method was originally designed to address this issue. Secondly, this method reduced multiple decision points and led to decision delays. The SVM classifier produced better classification accuracy, which aligns with the findings of Huang [
7] and Kyeong [
15]. The reason for this difference may be the varying sensitivity of algorithms to signal quality.
The study has demonstrated that recognition accuracy was not directly proportional to the quantity of features. Regarding signal features, WL achieved the best results, which was possibly because this feature provided information on waveform complexity, aligning with Kyeong’s findings [
14]. However, the addition of RMS, MAV, and SCC reduced recognition accuracy. Such examples also existed in R/W/A and E/A, WL and EMG, etc. This may be because the increase in features resulted in overlaps between classes. Therefore, it is necessary to select the combination of features based on the specific problem, and in this study, the RMS, WL, and ACC were extracted. ACCs, as shown in
Table 4, have generally improved recognition accuracy, although there was no significant difference. The confusion matrix revealed that ACCs had an advantage in recognizing speed but struggled with load recognition.
Figure 6 illustrates that sEMG signals exhibited low recognition accuracy at low speeds, reaching only 66% at 0.75 m/s. This phenomenon arises from the reduced muscle activity at lower speeds, highlighting the significance of incorporating acceleration.
Discrepancies between individual and overall results were present in all investigations. There are two main reasons for this phenomenon: one is individual differences such as walking habits, muscle strength, etc., and the other is electrode position. The first reason is inevitable, so although the overall results improved, there was no significant difference, as indicated in
Table 4,
Table 5 and
Table 6. The window increment mainly impacts the number of decision points (corresponding to the time between two decision points) within a gait cycle, and its determination should be based on specific requirements. A decision delay of 12 ms was chosen due to hardware latency. The window length corresponds to the time difference between the decision number point and muscle activation. Regarding model robustness, the thigh muscles yielded superior results compared to the calf muscles. Task recognition could be accomplished using three muscles on the anterior thigh.
While the method designed based on sEMG–ACCs signal fusion showed significant potential for continuous locomotion mode and task identification, this study also had several limitations. Firstly, this work represents an initial study, which investigated six types of locomotion modes and tasks, including level walking, slope, speed, and load. Secondly, we have only explored recognition and have not yet integrated it with exoskeletons. Thirdly, parameters were obtained based on offline data, and, in particular, the use, window increment, and length need to be re-evaluated for system performance. The aim of this study was to propose a suitable method that can help address task recognition, which is a commonly overlooked aspect in assistive exoskeletons. In future work, it will be essential to quantify varying speeds and loads as participants walk in realistic environments. Additionally, the recognition system would be integrated with the exoskeletons to develop appropriate control strategies. In the next phase of the study, it will be essential to comprehend the assist moment for different types of exoskeletons based on gait phases.




 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}