
Hidden Dynamics and Hybrid Synchronization of Fractional-Order Memristive Systems


1
School of Mathematics and Statistics, Yancheng Teachers University, Yancheng 224002, China
2
School of Science, Xi’an University of Posts and Telecommunications, Xi’an 710121, China
*
Author to whom correspondence should be addressed.
Axioms 2022, 11(11), 645; https://doi.org/10.3390/axioms11110645
Submission received: 21 September 2022
/
Revised: 29 October 2022
/
Accepted: 10 November 2022
/
Published: 15 November 2022
(This article belongs to the Special Issue Fractional-Order Equations and Optimization Models in Engineering)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:A fractional-order memristive system without equilibrium is addressed. Hidden attractors in the proposed system are discussed and the coexistence of a hidden attractor is found. Via theoretical analysis, the hybrid synchronization of the proposed system with partial controllers is investigated using fractional stability theory. Numerical simulation verifies the validity of the hybrid synchronization scheme.
1. Introduction
In the past few decades, chaotic systems have received significant attention and were applied in many fields [1,2,3,4] because of their complex behavior and sensitivity to the initial value [5,6,7]. Then, many chaotic or hyperchaotic systems were investigated, such as chaotic Jerk circuit capabilities and their application in communication [8], a novel chaotic system deduced from different 3D five-term chaotic flows and its realization in electronic circuit [9], robust chaos in an exponential chaotic model [10], etc.
With further research on chaotic systems, fractional calculus [11] was introduced and many fractional-order systems were proposed [12,13,14]. Chaotic behavior of a fractional-order Liu system with time delay can be controlled to an appointed point via designing only one controller [15]. Effects of system parameters on the dynamics of a fractional-order system were revealed and dynamic behavior transition was given [16]. A fractional-order system with negative parameters is proposed and its complex dynamics were analyzed [17]. Recently, as a vital electronic component with complex dynamics, a memeristor was introduced into the circuit system and corresponding dynamics were investigated. For example, a delayed fractional-order system with a memristor was presented and the system’s stability interval was deduced [18]; an active fractional-order memristor model was addressed and coexisting bifurcations as well as coexisting attractors were found [19]. Hidden attractors of Chua’s circuit coupled with the memristor were found [20]. Existing results suggest that introducing a memristor into a chaotic system can make the system appear more complex in its dynamics. Simultaneously, it can be found that the mentioned memristor is complicated and has some difficulty in application. Therefore, a simple memristor should be explored.
As a vital collective behavior, synchronization fractional-order systems have been focused on. Various controlling methods were proposed to realize different kinds of synchronization. Function projective synchronization and generalized synchronization of fractional-order systems were achieved using tracking control [21] and the pole-placement technique with one controller [22], respectively. Synchronization between multidrive systems and one response system was obtained by designing suitable controllers [23]. By designing fractional-order proportion integral sliding mode surface, synchronization of fractional-order systems was realized [24]. Complete synchronization between fractional-order systems with external disturbance was realized by designing a feedback controller [25]. Finite time synchronization of fractional-order networks with discontinuous activation was discussed via discontinuous controller [26]. Global synchronization of delayed fractional-order networks was discussed and the upper bound of the setting time for synchronization was given [27]. Dual synchronization between fractional-order systems with uncertain parameters was explored with adaptive controllers and adaptive laws were depicted [28].
Based on existing results, hybrid synchronization of a fractional-order memristive system without an equilibrium point is to be considered. Other parts of this paper are arranged as follows: Section 2 describes preliminaries to be used in the research. In Section 3, the system to be investigated is introduced and its hidden attractors are discussed. In Section 4, a hybrid synchronization scheme is given and the result is verified via theoretical analysis as well as numerical simulations. In Section 5, some conclusions are drawn.
2. Preliminaries
A fractional-order differential operator can be regarded as an extended concept of an integer-order differential operator and can be written as
where is the fractional order. With the development of a fractional-order derivative, several definitions were given, including Riemann–Liouville, Grünwald–Letnikov, and Caputo definition [28]. Much attention has been paid to the Caputo definition because its Laplace transformation formula has the same form as that of an integer-order derivative. Thus, the Caputo definition will be utilized in the next discussion, which is given as Definition 1 [29].
Definition 1.
Suppose is a continuous function, Caputo fractional-order derivative of with order () is denoted as
where suggests the least integer no less than . means Gamma function.
Specifically, for , Equation (2) can be simplified as
For simplicity, in the following discussion, is denoted as .
3. System Description and Its Dynamical Behaviors
In this paper, to investigate the dynamics of the circuit system deeply, a kind of fractional-order system is constructed, refereed to the system in [30] and depicted as
where is memductance, and are positive parameters for controlling the behavior of memductance. Obviously, is a key parameter determining the solutions of system (4), which has no equilibrium for and a single equilibrium point can be obtained for = 0.
Compared to the system in [30], the novelty of system (4) lies in the linear property of the memristor, which is simple in construction and implication.
According to the description about the attractor [31,32,33,34], it can be known that continuous chaotic systems can be classified into two categories: self-excited attractors and hidden attractors. When the basin of attraction of attractors intersects with any arbitrary neighborhood of an unstable equilibrium point, it is called self-excited attractors; otherwise, it goes by the name of hidden attractors. Therefore, hidden attractors involve two cases. In one case, the basin of attraction of attractors does not intersect with any arbitrary neighborhood of an unstable equilibrium point. In another case, the continuous chaotic system itself has no equilibrium point but with attractors. In this manuscript, the case when the system has no equilibrium point is taken into account. In the following study, suppose 0, but system (4) can also generate various attractors with the change in the order of the system and other parameters, including periodic attractor, quasi-periodic attractor, and chaotic attractor. These attractors are hidden attractors. Additionally, coexisting attractors can be detected. These results are discussed as follows via numerical simulations.
3.1. Hidden Attractors in the Proposed System
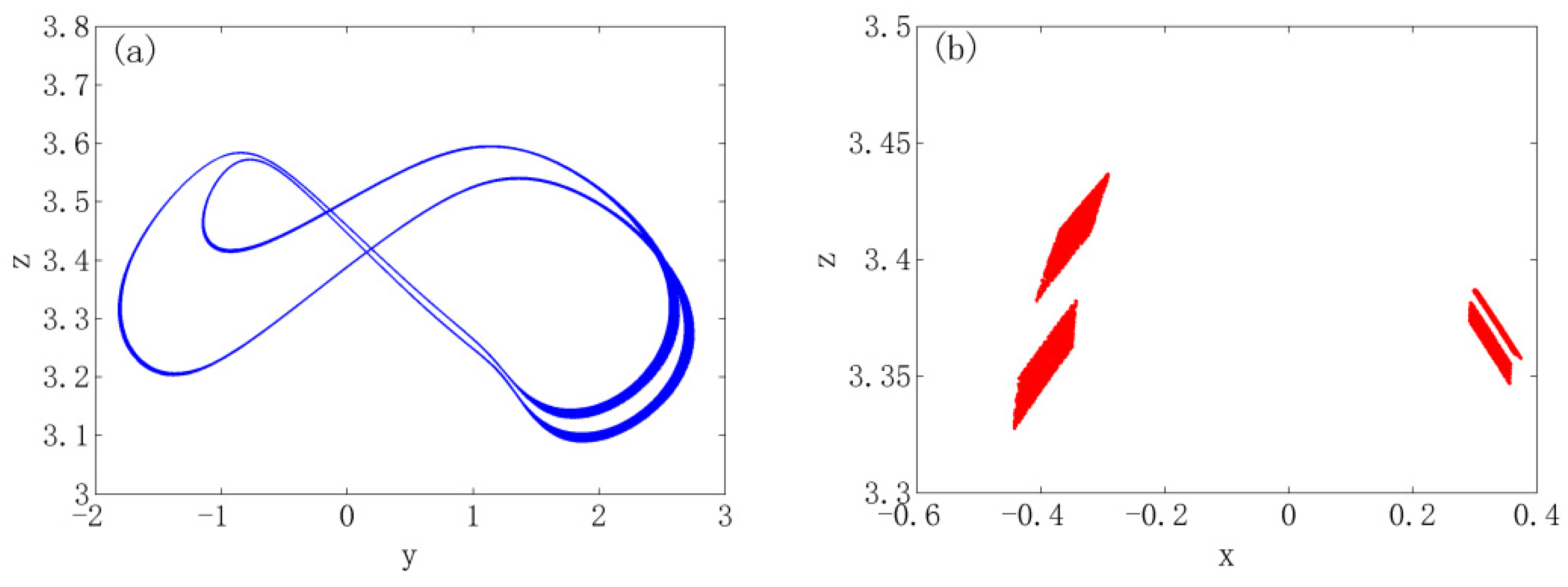
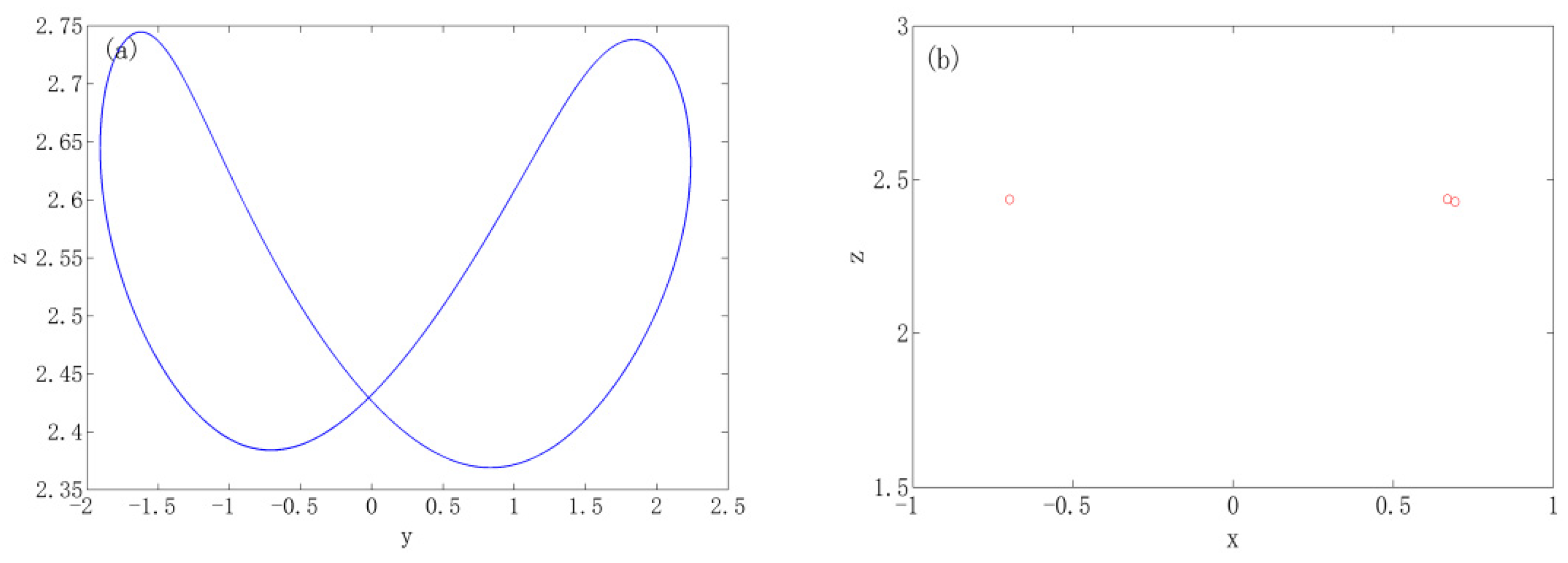
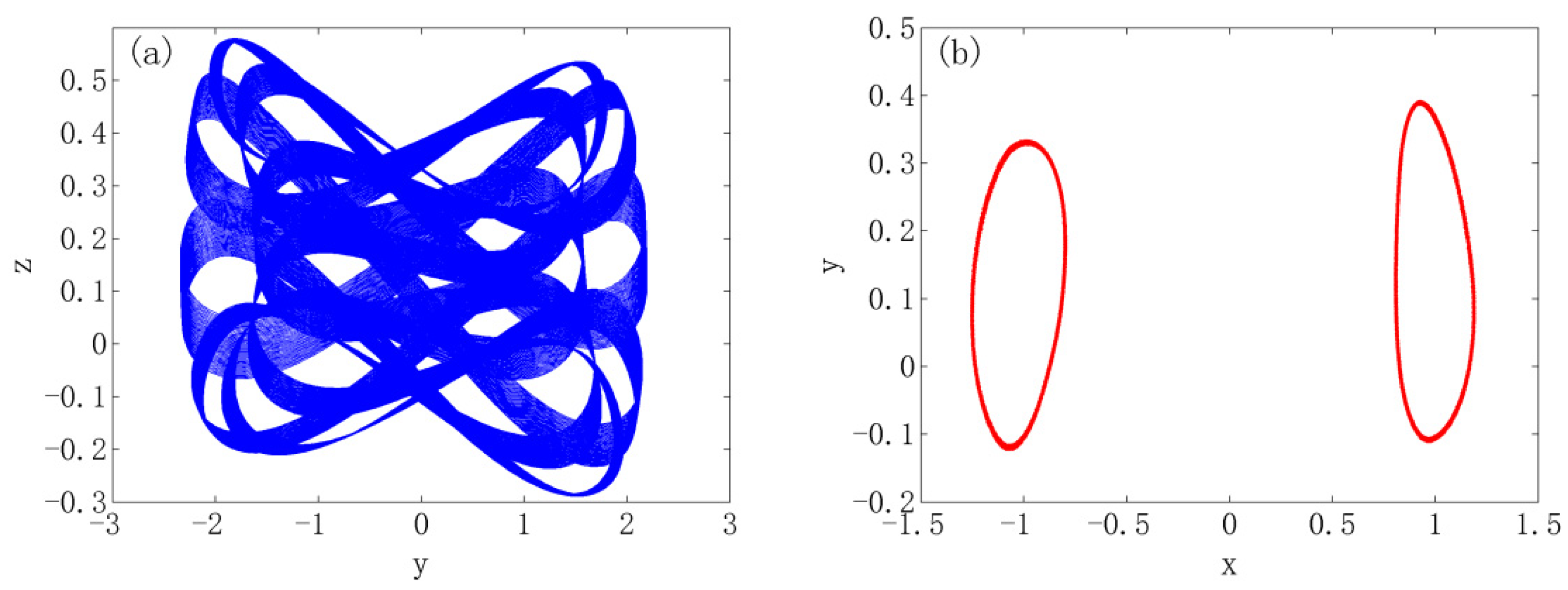
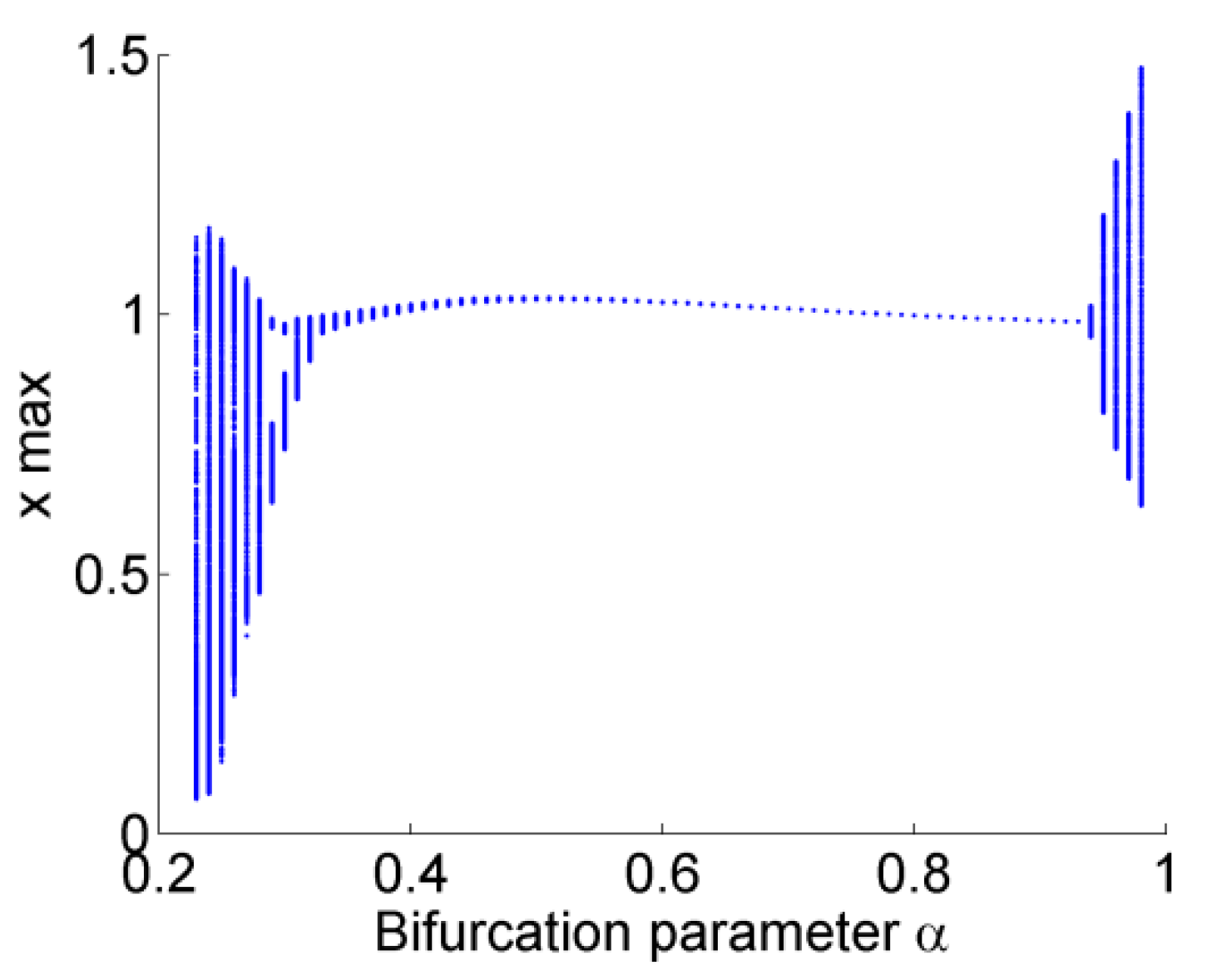
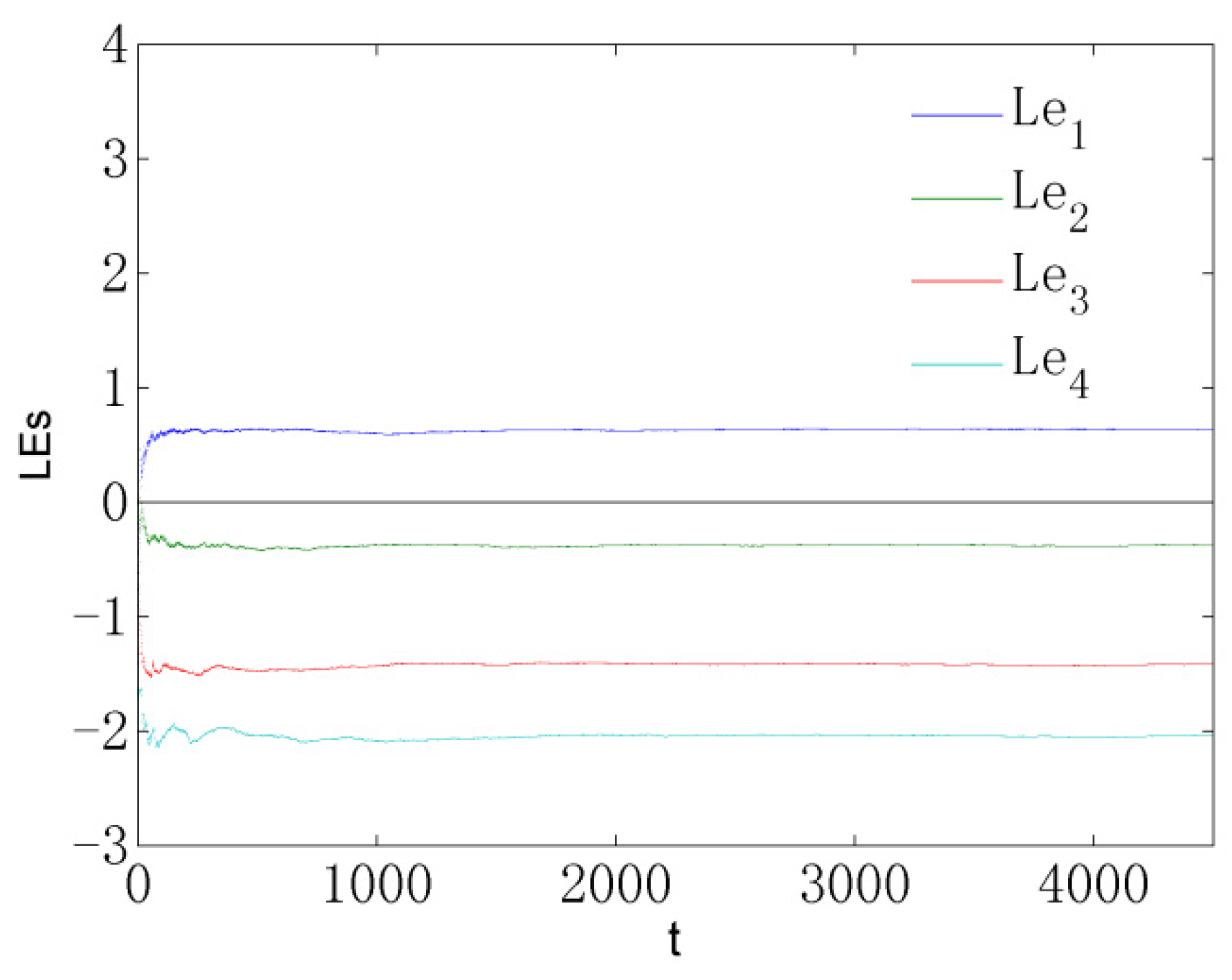
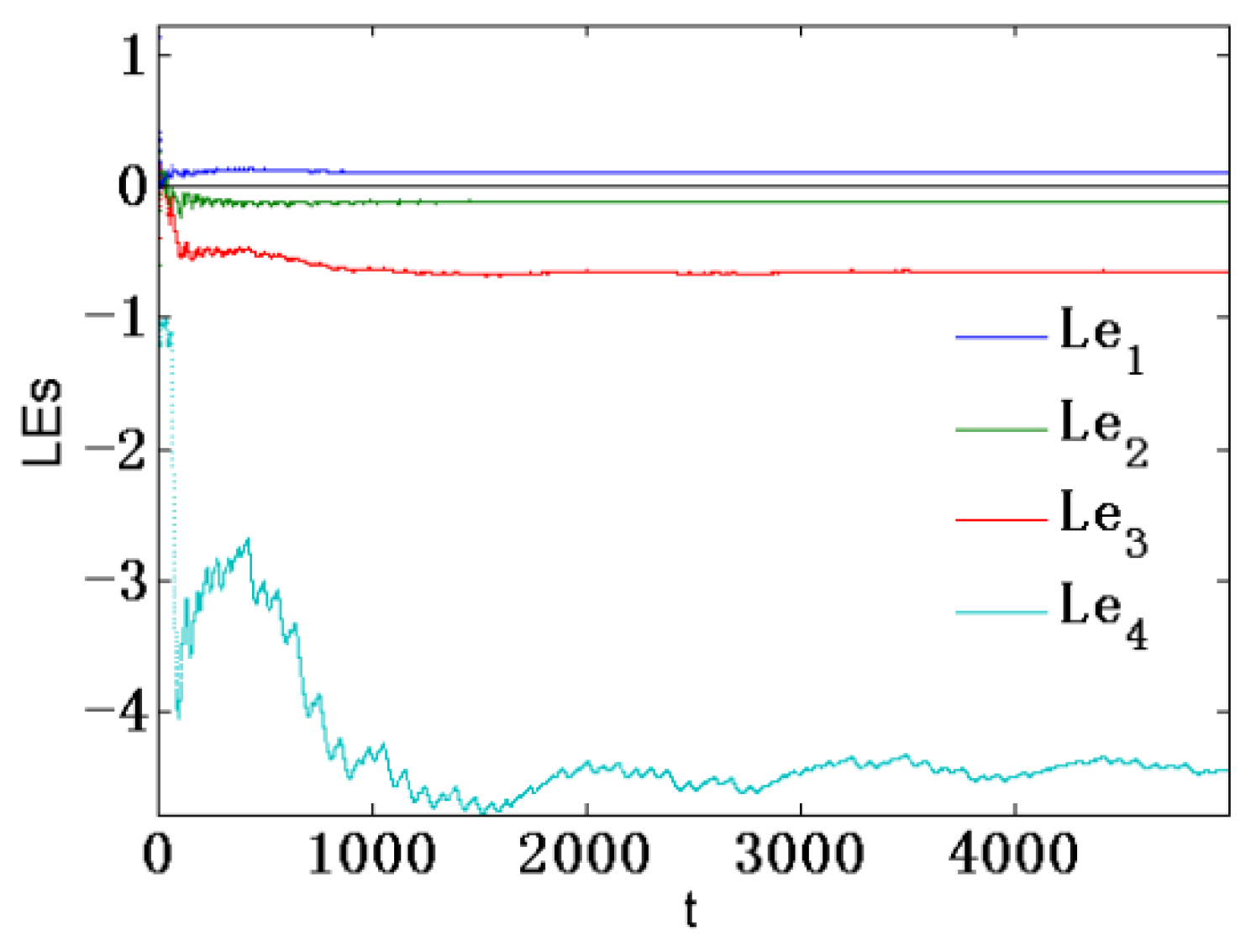
Choose a = 1, b = 0.1, = 0.5, = 2.01, = 0.75 and initial value (0, 2, 0, 0), with changing from 0.21 to 0.98, system (4) can show different hidden attractors, such as chaotic attractor (Figure 1), periodic attractor (Figure 2), and quasi-periodic attractor (Figure 3), which is confirmed in Figure 4. Furthermore, for a chaotic attractor, Lyapunov exponents are calcuted and depicted in Figure 5, which shows that when , the largest Lyapunov exponent in system (4) is positive. It verifies the result in Figure 1.
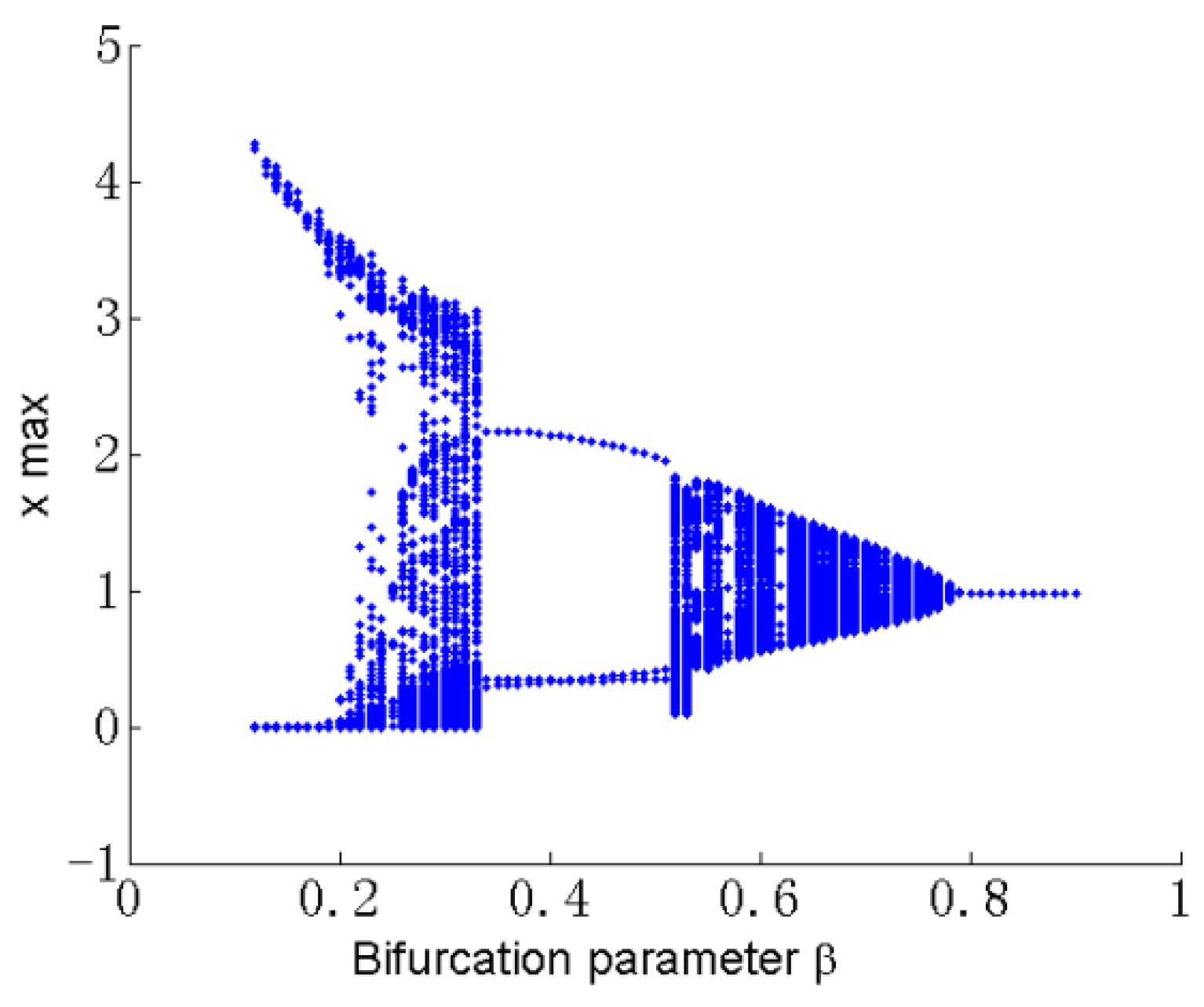
Select a = 1, b = 0.1, = 0.5, = 2.01, initial value (0, 2, 0, 0), fixed = 0.95, numerical simulations suggest that system (4) can also appear with different hidden attractors with changing from 0.1 to 0.9 (Figure 6, Figure 7 and Figure 8). It can be verified in the bifurcation diagram in Figure 9. Then, Lyapunov exponents in system (4) are calculated and given in Figure 10, which indicates that, for system (4) demonstrates a hidden chaotic attractor.
3.2. Coexistence of Different Hidden Attractors
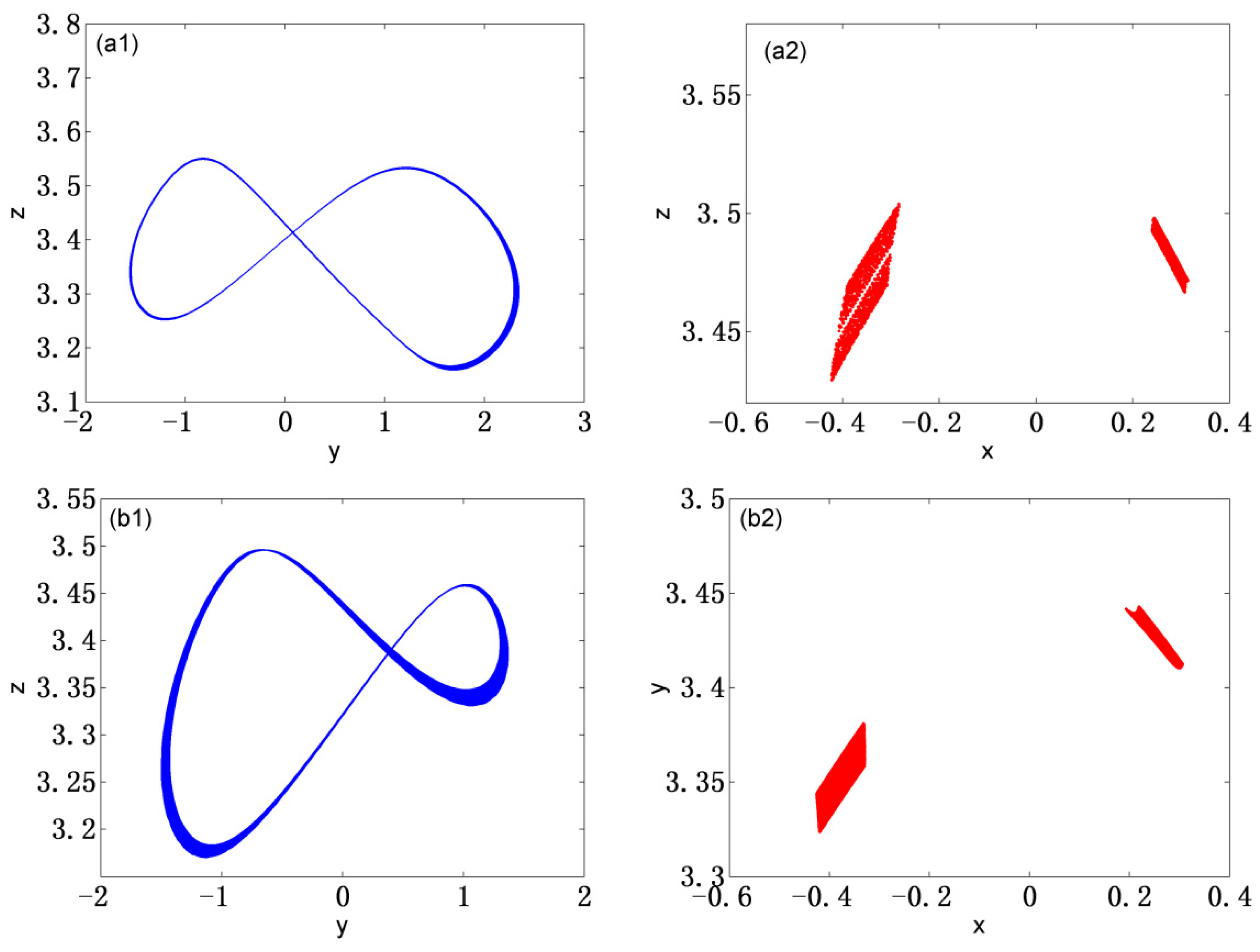
When system parameters and the order are all taken as fixed constants, the proposed system (4) can exhibit various hidden attractors according to different initial values, which means that the coexistence of different hidden attractors can be found in fractional-order system (4) (see Figure 11 and Figure 12). Figure 11 depicts the phase trajectory and the Poincare map of the coexistences of hidden chaotic attractors in system (4) when , . Phase trajectory and the Poincare map of the coexistences of the hidden chaotic attractor and 2D torus are shown in Figure 12, where = 0.95, . In all simulations, the other values of parameters are chosen as above.
4. Hybrid Synchronization Scheme
A scheme to realize the hybrid synchronization for system (4) is investigated utilizing fractional-order stability theory. For this purpose, the master system is taken as
and corresponding slave system with controllers is written as
where Ui(i = 1, 2, 3) are controllers to be determined.
To deliberate hybrid synchronization between systems (5) and (6), some definitions and lemmas are given as follows.
Lemma 1 ([35]).
Considering system
where is state variable with. It is said that system (7) converges to be stable when every eigenvalue of in (7) satisfies .
Lemma 2 ([36]).
The fractional-order system (7) will be stable if there is positive definite matrix , for any variable , holds.
Theorem 1.
If the controllers are chosen as
with () being the feedback gains, then hybrid synchronization between systems (5) and (6) can be realized.
Proof.
Let , , and , and error system between systems (6) and (5) can be achieved as
where
□
The , , , mentioned below are the same as here. Substitute (8) into (9) and we can obtain
Namely,
Furthermore,
Due to the boundness of chaotic systems, there exist constant , such that , , , (). Therefore, Equation (12) can be calculated as
Denote
It is easy to know that, if , , are selected large enough, one can obtain , ,. Then, we can obtain that
In line with Lemma 2, one can know that error system (10) or (11) will stabilize to zero under a feedback controller (8). That is to say, hybrid synchronization of systems (6) and (5) can be achieved with less controllers than the dimension of the system. Theorem 1 is proved.
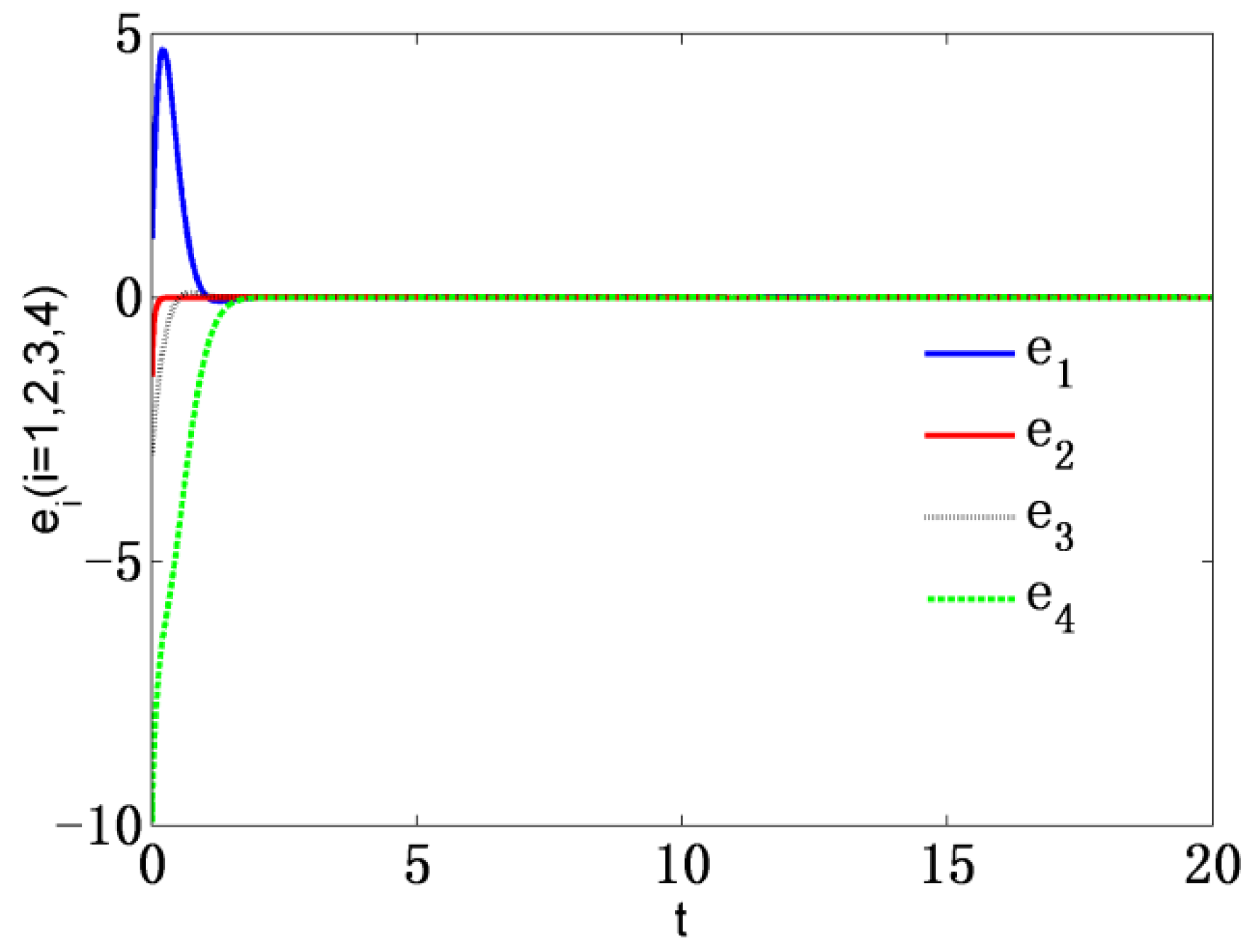
To test the aforementioned result, the Adams–Bashforth–Moulton predictor-corrector algorithm in MATLAB program is used. In the following numerical simulations, system parameters are selected as a = 1, b = 0.1, = 0.5, = 2.01, = 0.75 and fractional order . Initial values are chosen as , , respectively. Feedback gains in controllers are set as . The time evolutions in the error system are given in Figure 13, from which it can be obtained that the error states converge to zero quickly, which indicates that hybrid synchronization between the master system (5) and slave system (6) can be achieved in a short time.
5. Conclusions
In this paper, a novel fractional-order memristive system without equilibrium is presented via introducing a memristor into the considered system [3]. Some dynamics of the mentioned system are investigated. Some results are obtained as follows. (1) Various hidden attractors are found via altering the order of the system and value of system parameter. (2) Different coexistences of hidden attractors are detected via numerical simulations. (3) A hybrid synchronization scheme is put forward utilizing less controllers than the dimension of the system by fractional-order stability theory and effectiveness of the considered scheme is tested via numerical simulation.
Author Contributions
Conceptualization, H.J. and L.Z.; methodology, H.J. and Z.W.; software, C.C.; validation, Z.W. and C.C.; formal analysis, H.J.; investigation, H.J. and Z.W.; resources, H.J.; writing—original draft preparation, H.J. and Z.W.; writing—review and editing, L.Z. and C.C.; visualization, C.C.; supervision, Z.W.; project administration, Z.W. and C.C.; funding acquisition, Z.W. and C.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by [National Natural Science Foundation of China] grant number [11872327 and 51777180], [Natural Science Research Project of Jiangsu Colleges and Universities] grant number [20KJA190001] and [Natural Science Foundation of Shaanxi Province of China] grant number [2021JM-455].
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Akgul, A.; Hussain, S.; Pehlivan, I. A new three-dimensional chaotic system, its dynamical analysis and electronic circuit applications. Optik 2016, 127, 7062–7071. [Google Scholar] [CrossRef]
- Dudkowski, D.; Jafari, S.; Kapitaniak, T.; Kuznetsov, N.V.; Leonov, G.A.; Prasad, A. Hidden attractors in dynamical systems. Phys. Rep. 2016, 637, 1–50. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, C. A novel parallel chaotic system with greatly improved Lyapunov exponent and chaotic range. Int. J. Mod. Phys. B 2020, 34, 2050048. [Google Scholar] [CrossRef]
- Mobayen, S.; Fekih, A.; Vaidyanathan, S.; Sambas, A. Chameleon Chaotic Systems with Quadratic Nonlinearities: An Adaptive Finite-Time Sliding Mode Control Approach and Circuit Simulation. IEEE Access 2021, 9, 64558–64573. [Google Scholar] [CrossRef]
- Min, F.H.; Li, C.; Zhang, L.; Li, C.B. Initial value-related dynamical analysis of the memristor-based system with reduced dimensions and its chaotic synchronization via adaptive sliding mode control method. Chin. J. Phys. 2019, 58, 117–131. [Google Scholar] [CrossRef]
- Xuan, L.; Ahmad, S.; Ullah, A.; Saifullah, S.; Akgül, A.; Qu, H. Bifurcations, stability analysis and complex dynamics of Caputo fractal-fractional cancer model. Chaos Solitons Fractals 2022, 159, 112113. [Google Scholar] [CrossRef]
- Dong, E.; Zhang, Z.; Yuan, M.; Ji, Y.; Zhou, X.; Wang, Z. Ultimate boundary estimation and topological horseshoe analysis on a parallel 4D hyperchaotic system with any number of attractors and its multi-scroll. Nonlinear Dyn. 2019, 95, 3219–3236. [Google Scholar] [CrossRef]
- Capligins, F.; Litvinenko, A.; Aboltins, A.; Austrums, E.; Rusins, A. Chaotic jerk circuit usage in communication systems. In Proceedings of the 2020 IEEE Workshop on Microwave Theory and Techniques in Wireless Communications (MTTW’20), Riga, Latvia, 1–2 October 2020; pp. 227–230. [Google Scholar]
- Can, E.; Kocamaz, U.E.; Uyaroglu, Y. A new six-term 3d unified chaotic system. Iran. J. Sci. Technol.-Trans. Electr. Eng. 2020, 44, 1593–1604. [Google Scholar] [CrossRef]
- Hua, Z.; Zhou, Y. Exponential Chaotic Model for Generating Robust Chaos. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 3713–3724. [Google Scholar] [CrossRef]
- Butzer, P.L.; Westphal, U. An Introduction to Fractional Calculus; World Scientific: Singapore, 2000; pp. 1–85. [Google Scholar] [CrossRef]
- Chai, X.H.; Cao, H.; Zhang, B.; Jiao, M.; Zhang, C.J. Research on analysis and control performance of full fractional-order boost converter system. J. Power Suppl. 2020, 17, 27–33. [Google Scholar]
- El-Saka, H.A.A.; Lee, S.; Jang, B. Dynamic analysis of fractional-order predator–prey biological economic system with Holling type II functional response. Nonlinear Dyn. 2019, 96, 407–416. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, F. A fractional-order CNN hyperchaotic system for image encryption algorithm. Phys. Scr. 2021, 96, 035209. [Google Scholar] [CrossRef]
- Dong, J.; Xiao, Y.; Ma, H.; Zhang, G.J. Dynamic characteristics analysis of time-delay fractional order dynamic system. In Proceedings of the 2020 3rd International Conference on Computer Information Science and Application Technology (CISAT), Dali, China, 17–19 July 2020; Volume 1634, p. 012105. [Google Scholar]
- Li, R. Effects of system parameter and fractional order on dynamic behavior evolution in fractional-order Genesio-Tesi system. Optik 2016, 127, 6695–6709. [Google Scholar] [CrossRef]
- Tacha, O.I.; Munoz-Pacheco, J.M.; Zambrano-Serrano, E.; Stouboulos, I.N.; Pham, V.-T. Determining the chaotic behavior in a fractional-order finance system with negative parameters. Nonlinear Dyn. 2018, 94, 1303–1317. [Google Scholar] [CrossRef]
- Yang, Z.; Liang, D.; Ding, D.; Hu, Y. Dynamic behavior of fractional-order memristive time-delay system and image encryption application. Mod. Phys. Lett. B 2021, 35, 2150271. [Google Scholar] [CrossRef]
- Wu, J.; Wang, G.; Iu, H.H.-C.; Shen, Y.; Zhou, W. A Nonvolatile Fractional Order Memristor Model and Its Complex Dynamics. Entropy 2019, 21, 955. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Yu, J.; Bao, B. Finding hidden attractors in improved memristor-based Chua’s circuit. Circuits Syst. 2015, 51, 462–464. [Google Scholar] [CrossRef]
- Zhou, P.; Zhu, W. Function projective synchronization for fractional-order chaotic systems. Nonlinear Anal. Real World Appl. 2011, 12, 811–816. [Google Scholar] [CrossRef]
- Wang, X.-Y.; Hu, Z.-W.; Luo, C. Generalized Synchronization of Nonidentical Fractional-Order Chaotic Systems. Int. J. Mod. Phys. B 2013, 27, 1350195. [Google Scholar] [CrossRef]
- Khan, A.; Bhat, M.A. Multiswitching combination synchronization of non-identical fractional-order chaotic systems. Pramana-J. Phys. 2018, 90, 73. [Google Scholar] [CrossRef]
- Meng, X.L.; Mao, B.X. Sliding mode synchronization of fractional-order T chaotic systems with logarithmic. J. Shandong Univ. Eng. Sci. 2020, 50, 7–12. [Google Scholar]
- Guo, R.; Zhang, Y.; Jiang, C. Synchronization of Fractional-Order Chaotic Systems with Model Uncertainty and External Disturbance. Mathematics 2021, 9, 877. [Google Scholar] [CrossRef]
- Udhayakumar, K.; Rihan, F.A.; Rakkiyappan, R.; Cao, J. Fractional-order discontinuous systems with indefinite LKFs: An application to fractional-order neural networks with time delays. Neural Netw. 2021, 145, 319–330. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.L.; Liu, X.G.; Li, X.M. Finite-time synchronization of delayed fractional-order coupled neural networks. Int. J. Syst. Sci. 2022, 53, 2597–2611. [Google Scholar] [CrossRef]
- Liu, D.; Li, T.; Wang, Y. Adaptive Dual Synchronization of Fractional-Order Chaotic System with Uncertain Parameters. Mathematics 2022, 10, 470. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F. Fractional calculus: Integral and differential equations of fractional order. arXiv 2008, arXiv:0805.3823. [Google Scholar]
- Bao, H.; Bao, B.C.; Lin, Y.; Wang, J.; Wu, H.G. Hidden attractor and its dynamical characteristic in memristive self-oscillating system. Acta Phys. Sin. 2016, 65, 180501. [Google Scholar]
- Pulido-Luna, J.R.; López-Rentería, J.A.; Cazarez-Castro, N.R.; Campos, E. A two-directional grid multiscroll hidden attractor based on piecewise linear system and its application in pseudo-random bit generator. Integration 2021, 81, 34–42. [Google Scholar] [CrossRef]
- Awrejcewicz, J. Chapter 3: Generation of self-excited and hidden multiscroll attractors in multistable systems. In Recent Trends in Chaotic, Nonlinear and Complex Dynamics, Chapter 3; World Scientific: Singapore, 2021; pp. 40–78. [Google Scholar]
- Escalante-González, R.J.; Campos, E. Multistable systems with hidden and self-excited scroll attractors generated via piecewise linear systems. Complexity 2020, 2020, 7832489. [Google Scholar] [CrossRef] [Green Version]
- Kuznetsov, N.V.; Leonov, A. Hidden attractor in dynamical systems: Systems with no equilibria, multistability and coexisting attractors. IFAC Proc. Vol. 2014, 47, 5445–5454. [Google Scholar] [CrossRef]
- Hu, J.B.; Han, Y.; Zhao, L.D. A stability theorem about fractional systems and synchronizing fractional unified chaotic systems based on the theorem. Acta Phys. Sin. 2009, 58, 4402–4407. [Google Scholar]
- Hu, J.B.; Han, Y.L.; Zhao, D. A novel stability theorem for fractional systems and its applying in synchronizing fractional chaotic system based on backstepping approach. Acta Phys. Sin. 2009, 58, 2235–2239. [Google Scholar]
Figure 1.
Hidden chaotic attractor of system (4) when . (a) Phase trajectory diagram in plane; (b) Poincare map in plane.
Figure 1.
Hidden chaotic attractor of system (4) when . (a) Phase trajectory diagram in plane; (b) Poincare map in plane.

Figure 2.
Hidden periodic attractor of system (4) when . (a) Phase trajectory diagram in plane; (b) Poincare map in plane.
Figure 2.
Hidden periodic attractor of system (4) when . (a) Phase trajectory diagram in plane; (b) Poincare map in plane.

Figure 3.
Hidden quasi-periodic attractor of system (4) when . (a) Phase trajectory diagram in plane; (b) Poincare map in plane.
Figure 3.
Hidden quasi-periodic attractor of system (4) when . (a) Phase trajectory diagram in plane; (b) Poincare map in plane.

Figure 4.
Bifurcation of in system (4) with order changing from 0.21 to 0.98.

Figure 5.
Lyapunov exponents of system (4) when .

Figure 6.
Hidden chaotic attractor of system (4) when = 0.30. (a) Phase trajectory diagram in plane; (b) Poincare map in plane.
Figure 6.
Hidden chaotic attractor of system (4) when = 0.30. (a) Phase trajectory diagram in plane; (b) Poincare map in plane.

Figure 7.
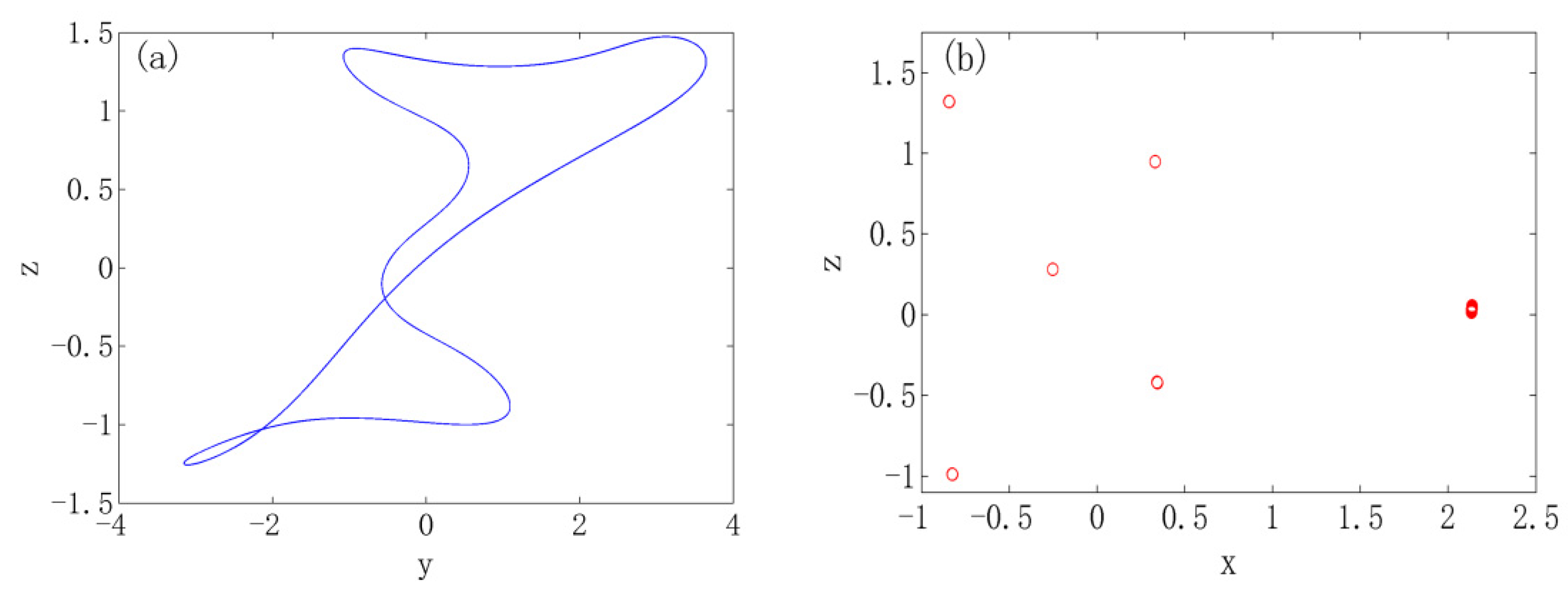
Hidden periodic attractor of system (4) when = 0.4. (a) Phase trajectory diagram in plane; (b) Poincare map in plane.
Figure 7.
Hidden periodic attractor of system (4) when = 0.4. (a) Phase trajectory diagram in plane; (b) Poincare map in plane.

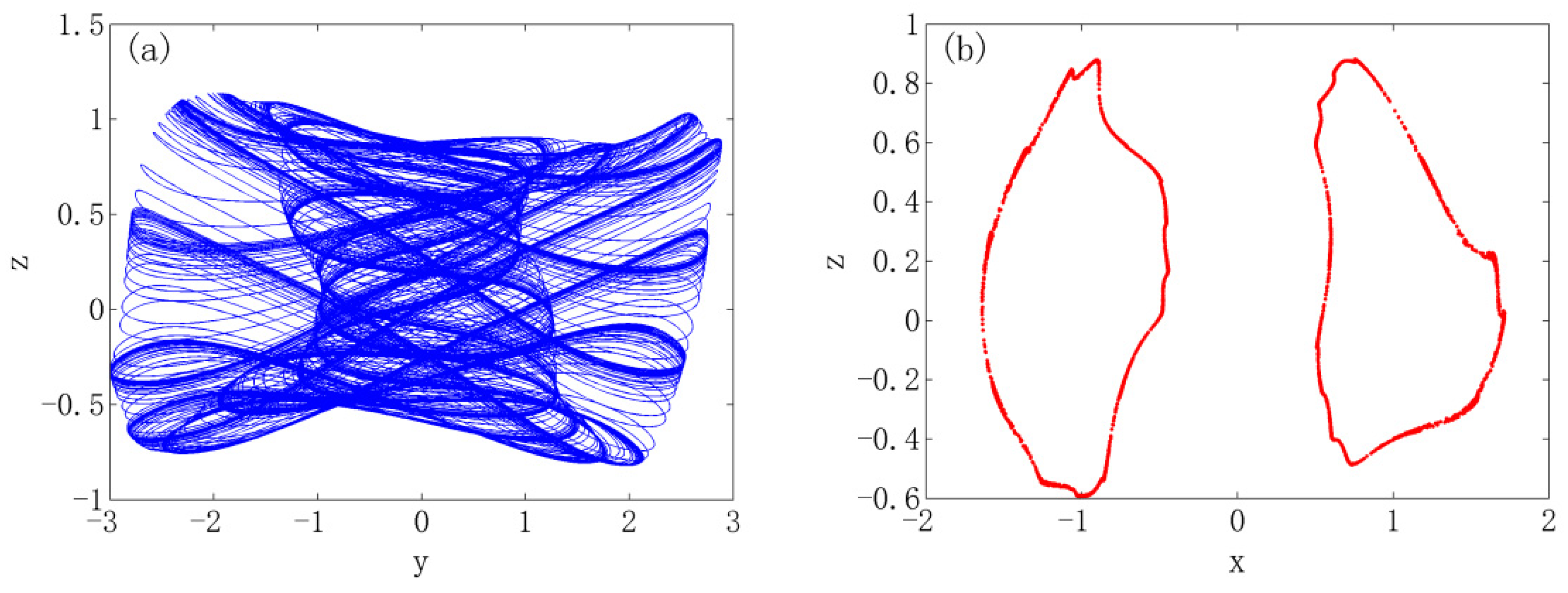
Figure 8.
Hidden quasi-periodic attractor of system (4) when = 0.58. (a) Phase trajectory diagram in plane; (b) Poincare map in plane.
Figure 8.
Hidden quasi-periodic attractor of system (4) when = 0.58. (a) Phase trajectory diagram in plane; (b) Poincare map in plane.

Figure 9.
Bifurcation diagram of in system (4) with change of from 0.1 to 0.8.

Figure 10.
Lyapunov exponents in system (4) when .

Figure 11.
Coexistence of hidden chaotic attractors with symmetrical structure for different initial values. (a1,a2) are phase trajectory and Poincare maps with initial value (0, 2, 0, 0), respectively. (b1,b2) are phase trajectory and Poincare maps with initial value (1, −2, 0, 1), respectively.
Figure 11.
Coexistence of hidden chaotic attractors with symmetrical structure for different initial values. (a1,a2) are phase trajectory and Poincare maps with initial value (0, 2, 0, 0), respectively. (b1,b2) are phase trajectory and Poincare maps with initial value (1, −2, 0, 1), respectively.

Figure 12.
Coexistence of hidden quasi-periodic and chaotic attractor for different initial values. (a1,a2) are phase trajectory and Poincare maps with initial value (0, 2, 0, 0), respectively. (b1,b2) are phase trajectory and Poincare maps with initial value (1, −2, 0, 0), respectively.
Figure 12.
Coexistence of hidden quasi-periodic and chaotic attractor for different initial values. (a1,a2) are phase trajectory and Poincare maps with initial value (0, 2, 0, 0), respectively. (b1,b2) are phase trajectory and Poincare maps with initial value (1, −2, 0, 0), respectively.

Figure 13.
Curves of errors in system (9) with controllers (8).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Jiang, H.; Zhuang, L.; Chen, C.; Wang, Z. Hidden Dynamics and Hybrid Synchronization of Fractional-Order Memristive Systems. Axioms 2022, 11, 645. https://doi.org/10.3390/axioms11110645
AMA Style
Jiang H, Zhuang L, Chen C, Wang Z. Hidden Dynamics and Hybrid Synchronization of Fractional-Order Memristive Systems. Axioms. 2022; 11(11):645. https://doi.org/10.3390/axioms11110645
Chicago/Turabian StyleJiang, Haipeng, Lizhou Zhuang, Cheng Chen, and Zuolei Wang. 2022. "Hidden Dynamics and Hybrid Synchronization of Fractional-Order Memristive Systems" Axioms 11, no. 11: 645. https://doi.org/10.3390/axioms11110645
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.