Receptance-Based Dominant Eigenvalues Computation of Controlled Vibrating Systems with Multiple Time-Delays Using a Contour Integral Method

 , ,
, ,
Abstract
:1. Introduction
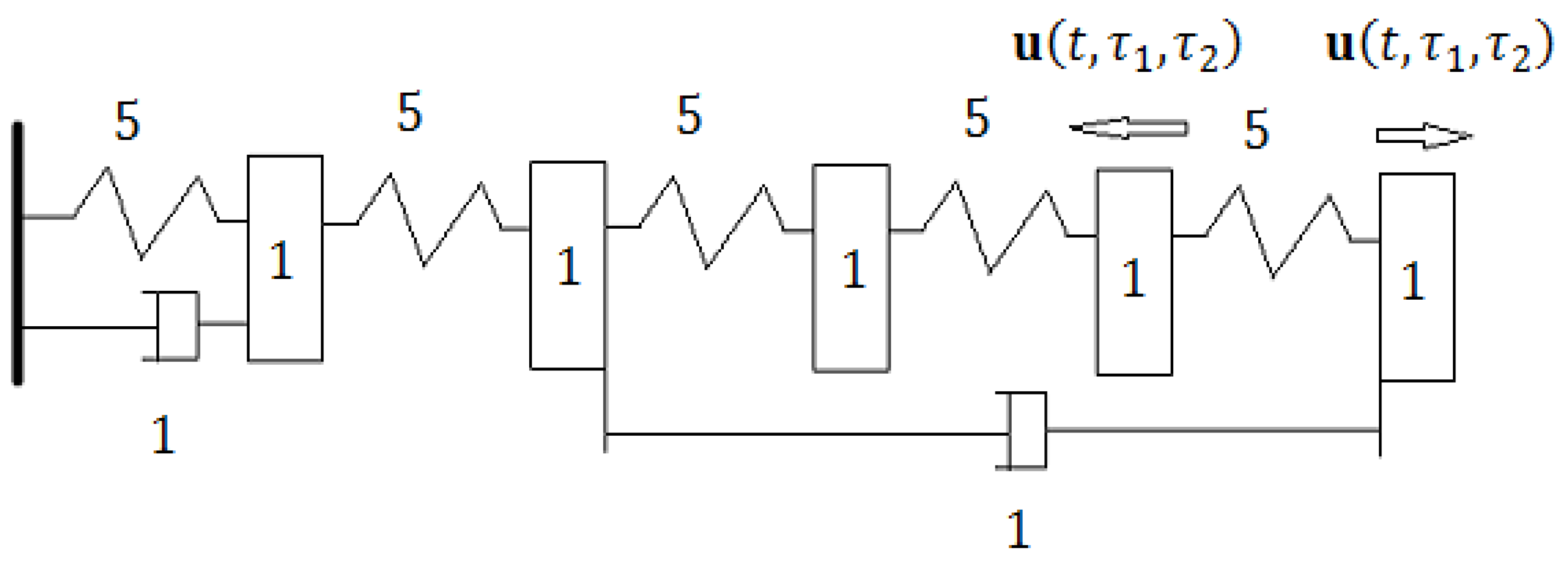
2. System Description and Reduced Characteristic Function
3. The Contour Integral Method for Solving NEP
3.1. A Contour Integral Method
3.2. Practical Applications
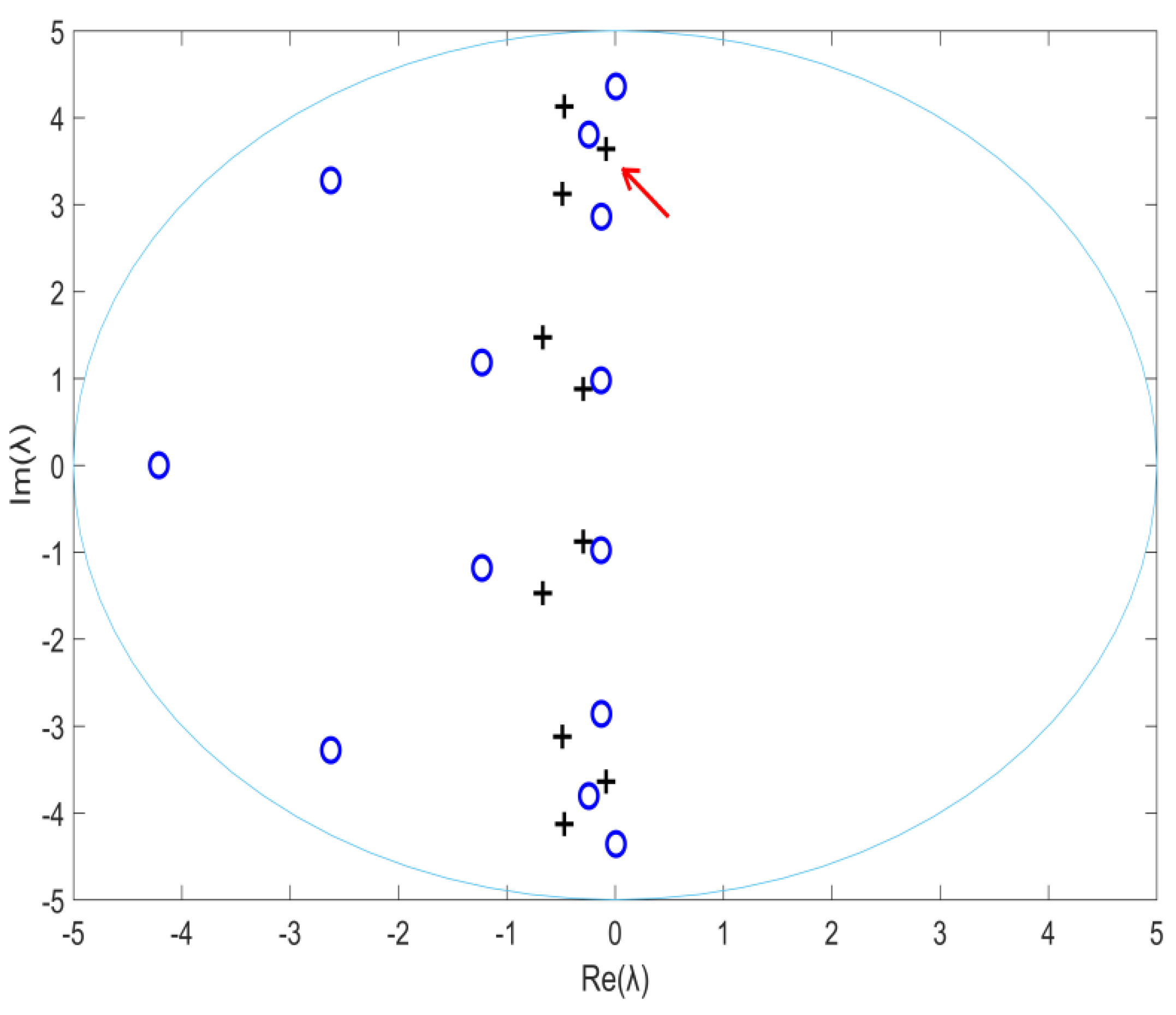
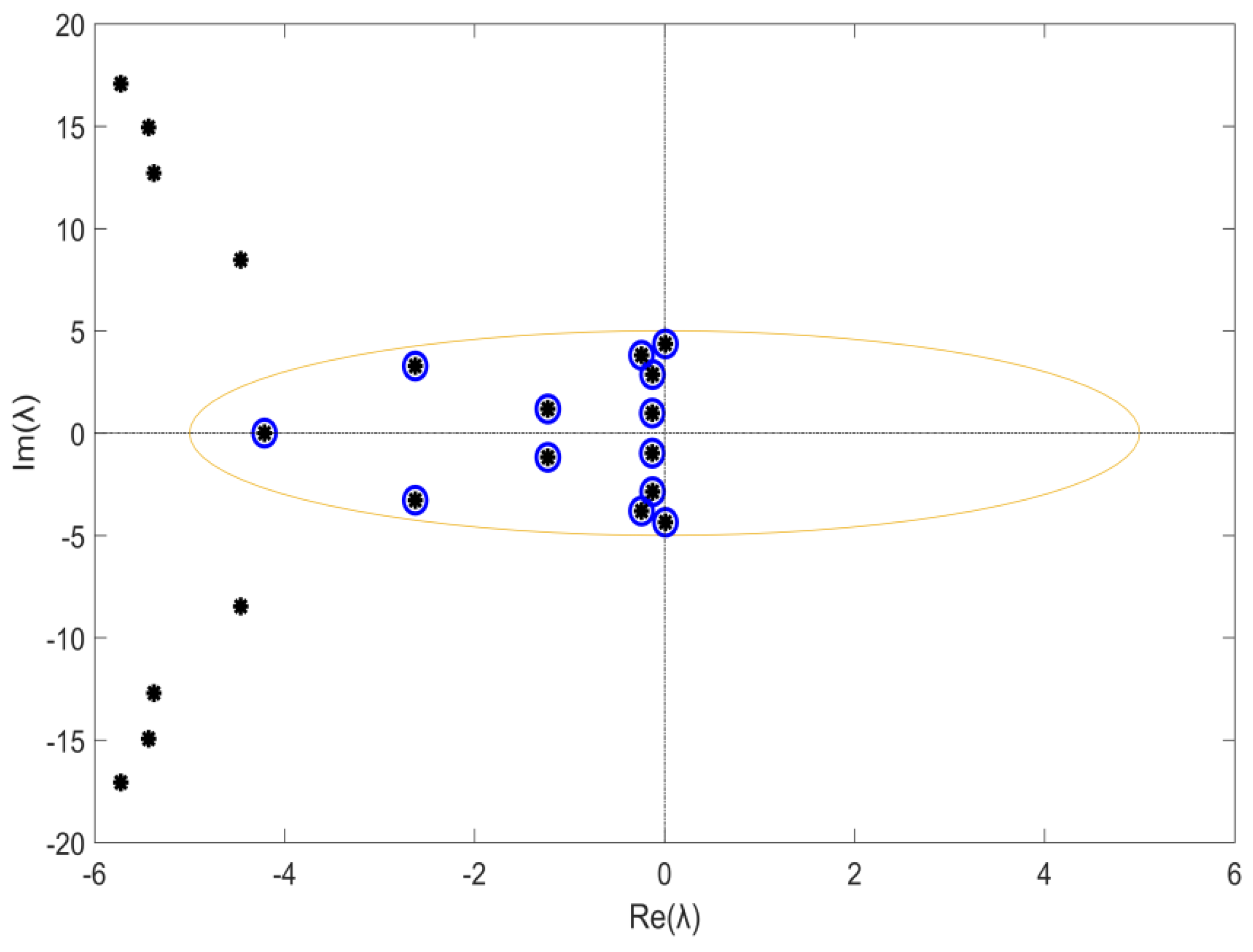
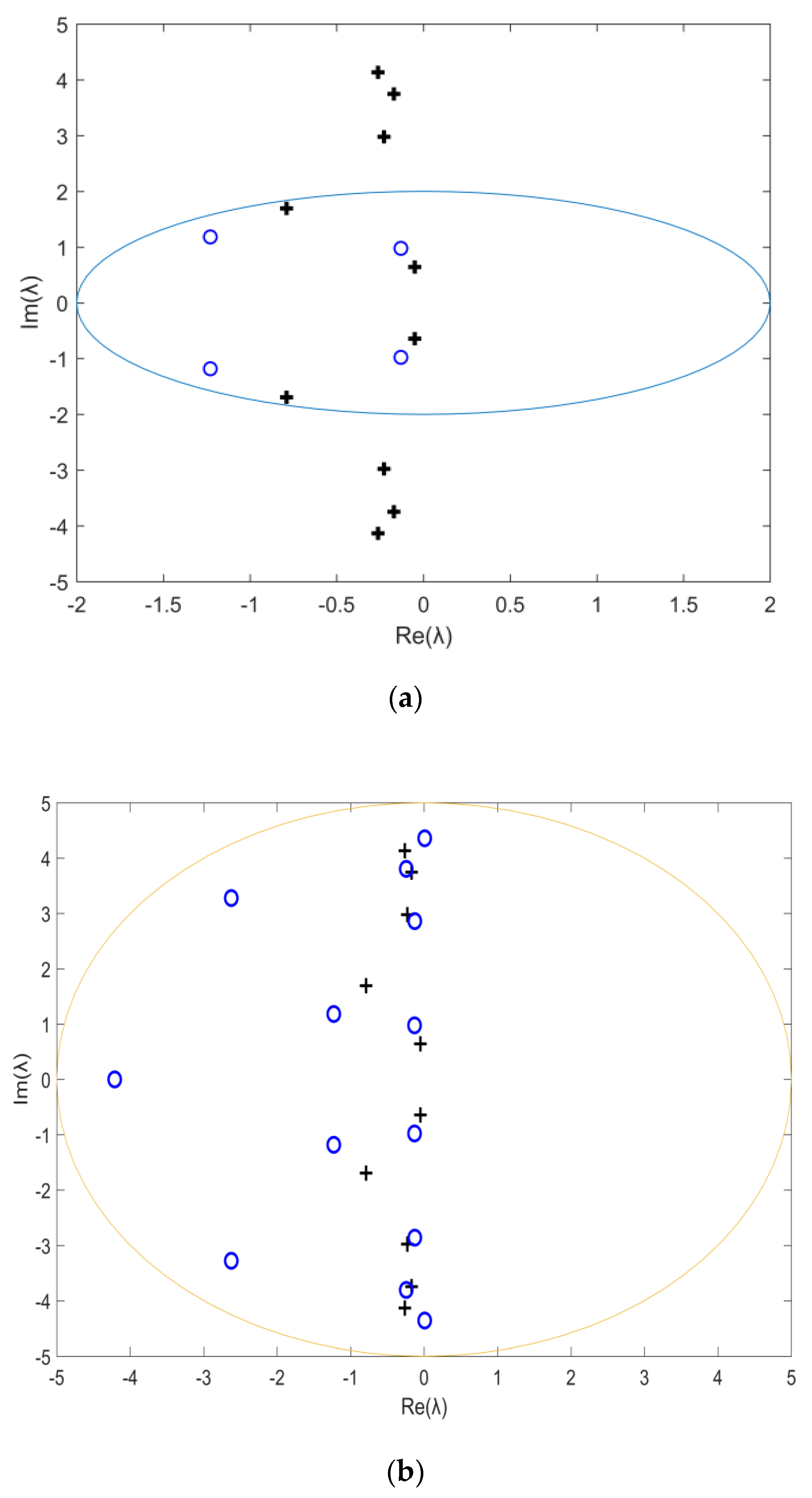
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pekar, L.; Gao, Q. Spectrum analysis of LTI continuous-time systems with constant delays: A literature overview of some recent results. IEEE Access 2018, 6, 35457–35491. [Google Scholar] [CrossRef]
- Vyhlídal, T.; Zítek, P. QPmR—Quasi-polynomial root-finder: Algorithm update and examples. In Delay Systems, Advances in Delays and Dynamics; Vyhlídal, T., Lafay, J.F., Sipahi, R., Eds.; Springer: Cham, Switzerland, 2014; Volume 1, pp. 299–312. [Google Scholar]
- Surya, S.; Vyasarayani, C.P.; Kalmar-Nagy, T. Homotopy continuation for characteristic roots of delay differential equations using the Lambert W function. J. Vib. Control 2017, 24, 3944–3951. [Google Scholar] [CrossRef]
- Engelborghs, K.; Roose, D. Numerical computation of stability and detection of Hopf bifurcation of steady state solutions of delay differential equations. Adv. Comput. Math. 1999, 10, 271–289. [Google Scholar] [CrossRef]
- Verheyden, K.; Luzyanina, T.; Roose, D. Efficient computation of characteristic roots of delay differential equations using LMS methods. J. Comput. Appl. Math. 2008, 214, 209–226. [Google Scholar] [CrossRef]
- Breda, D. Solution operator approximation for characteristic roots of delay differential equations. Appl. Numer. Math. 2006, 56, 305–331. [Google Scholar] [CrossRef]
- Breda, D.; Maset, S.; Vermiglio, R. Computing the characteristic roots for delay differential equations. IMA J. Numer. Anal. 2004, 24, 1–19. [Google Scholar] [CrossRef]
- Wu, Z.; Michiels, W. Reliably computing all characteristic roots of delay differential equations in a given right half plane using a spectral method. J. Comput. Appl. Math. 2012, 236, 2499–2514. [Google Scholar] [CrossRef]
- Breda, D.; Maset, S.; Vermiglio, R. Pseudospectral differencing methods for characteristic roots of delay differential equations. SIAM J. Sci. Comput. 2005, 27, 482–495. [Google Scholar] [CrossRef]
- Ram, Y.M.; Mottershead, J.E. Receptance method in active vibration control. AIAA J. 2007, 45, 562–567. [Google Scholar] [CrossRef]
- Mottershead, J.E.; Tehrani, M.G.; James, S.; Ram, Y.M. Active vibration suppression by pole-zero placement using measured receptances. J. Sound Vib. 2008, 311, 1391–1408. [Google Scholar] [CrossRef]
- Tehrani, M.G.; Mottershead, J.E. An overview of the receptance method in active vibration control. Math. Modell. 2012, 7, 1174–1178. [Google Scholar] [CrossRef] [Green Version]
- Ram, Y.M.; Singh, A.; Mottershead, J.E. State feedback control with time delay. Mech. Syst. Signal Process. 2009, 23, 1940–1945. [Google Scholar] [CrossRef]
- Bai, Z.-J.; Chen, M.-X.; Yang, J.-K. A multi-step hybrid method for multi-input partial quadratic eigenvalue assignment with time delay. Linear Algebra Appl. 2012, 437, 1658s–1669s. [Google Scholar] [CrossRef]
- Singh, K.V.; Ouyang, H. Pole assignment using state feedback with time delay in friction-induced vibration problems. Acta Mech. 2013, 224, 645–656. [Google Scholar] [CrossRef]
- Xiang, J.; Zhen, C.; Li, D. Partial pole assignment with time delay by the receptance method using multi-input control from measurement output feedback. Mech. Syst. Signal Process. 2016, 66–67, 743–755. [Google Scholar]
- Tingrui, L.; Lin, C. Vibration control of wind turbine blade based on data fitting and pole placement with minimum-order observer. Shock Vib. 2018, 2018, 5737359. [Google Scholar]
- Santos, T.L.M.; Araújo, J.M.; Franklin, T.S. Receptance-based stability criterion for second-order linear systems with time-varying delay. Mech. Syst. Signal Process. 2018, 110, 428–441. [Google Scholar] [CrossRef]
- Zhang, J.-F.; Ouyang, H.; Zhang, K.-W.; Liu, H.-M. Stability test and dominant eigenvalues computation for second-order linear systems with multiple time-delays using receptance method. Mech. Syst. Signal Process. 2019, 106180. [Google Scholar] [CrossRef]
- Polizzi, E. Density-matrix-based algorithm for solving eigenvalue problems. Phys. Rev. 2009, B79, 115112. [Google Scholar] [CrossRef] [Green Version]
- Asakura, J.; Sakurai, T.; Tadano, H.; Ikegami, T.; Kimura, K. A numerical method for nonlinear eigenvalue problems using contour integral. JSIAM Lett. 2009, 1, 52–55. [Google Scholar] [CrossRef] [Green Version]
- Beyn, W.-J. An integral method for solving nonlinear eigenvalue problems. Linear Algebra Appl. 2012, 436, 3839–3863. [Google Scholar] [CrossRef] [Green Version]
- Yokota, S.; Sakurai, T. A projection method for nonlinear eigenvalue problems using contour integrals. JSIAM Lett. 2013, 5, 41–44. [Google Scholar] [CrossRef] [Green Version]
- Güttel, S.; Tisseur, F. The nonlinear eigenvalue problem. Acta Numer. 2017, 26, 1–94. [Google Scholar] [CrossRef] [Green Version]
- Bellman, R.; Cooke, K.L. Differential–Difference Equations; Academic Press: New York, NY, USA, 1963. [Google Scholar]
- Michiels, W.; Niculescu, S.-I. Stability, Control, and Computation for Time–Delay Systems: An Eigenvalue-Based Approach; SIAM: Philadelphia, PA, USA, 2014. [Google Scholar]
- Ramachandran, P.; Ram, Y.M. Stability boundaries of mechanical controlled system with time delay. Mech. Syst. Signal Process. 2012, 27, 523–533. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Contour Integral Method (R = 5) | A Spectral Method [8] |
|---|---|
| 0.0083 ± 4.3588i | 0.0083 ± 4.3588i |
| −0.1267 ± 2.8611i | −0.1267 ± 2.8611i |
| −0.1300 ± 0.9773i | −0.1300 ± 0.9773i |
| −0.2429 ± 3.8060i | −0.2429 ± 3.8060i |
| −1.2293 ± 1.1821i | −1.2293 ± 1.1821i |
| −2.6245 ± 3.2784i | −2.6245 ± 3.2784i |
| −4.2116 + 0.0000i | −4.2116 + 0.0000i |
| −4.4613 ± 8.4646i | |
| −5.3755 ± 12.7017i | |
| −5.4304 ± 14.9364i | |
| −5.7236 ± 17.0715i |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.-S.; Ouyang, H.; Zhang, J.-F.; Zhang, K.-W.; Hu, Z.-G.; Liu, H.-M. Receptance-Based Dominant Eigenvalues Computation of Controlled Vibrating Systems with Multiple Time-Delays Using a Contour Integral Method. Appl. Sci. 2019, 9, 5263. https://doi.org/10.3390/app9235263
Yang J-S, Ouyang H, Zhang J-F, Zhang K-W, Hu Z-G, Liu H-M. Receptance-Based Dominant Eigenvalues Computation of Controlled Vibrating Systems with Multiple Time-Delays Using a Contour Integral Method. Applied Sciences. 2019; 9(23):5263. https://doi.org/10.3390/app9235263
Chicago/Turabian StyleYang, Jun-Shen, Huajiang Ouyang, Jia-Fan Zhang, Ke-Wei Zhang, Zhi-Gang Hu, and Hai-Min Liu. 2019. "Receptance-Based Dominant Eigenvalues Computation of Controlled Vibrating Systems with Multiple Time-Delays Using a Contour Integral Method" Applied Sciences 9, no. 23: 5263. https://doi.org/10.3390/app9235263