
Bi-Level Dispatch and Control Architecture for Power System in China Based on Grid-Friendly Virtual Power Plant


1
Key Laboratory of Power System Intelligent Dispatch and Control of the Ministry of Education, Shandong University, Jinan 250061, China
2
Skolkovo Institute of Science and Technology, Bolshoy Boulevard 30, Bld. 1, 121205 Moscow, Russia
*
Author to whom correspondence should be addressed.
Appl. Sci. 2021, 11(3), 1282; https://doi.org/10.3390/app11031282
Submission received: 28 December 2020
/
Revised: 24 January 2021
/
Accepted: 26 January 2021
/
Published: 30 January 2021
(This article belongs to the Special Issue Resilient and Sustainable Distributed Energy Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Non-synchronous renewable energy sources (RESs) have strong volatility and low inertia, which brings about great challenges on the accommodation of RESs and the security and stability of power systems. This paper proposes a bi-level power system dispatch and control architecture based on the grid-friendly virtual power plant (GVPP), so as to accommodate RESs flexibly and securely. The typical dispatch and control system of the power system in China is presented, and the particular challenges stemming from non-synchronous RESs are analyzed. The functional requirements, concept, and fundamental design of the GVPP are provided, which is distinguished from traditional virtual power plants (VPPs) for its active participation in power system stability control. Based on the cloud platform, a bi-level dispatch and control architecture considering two objectives is established. First, in the inner level, the GVPP operates to promote the accommodation of RESs under normal condition. Then, from the perspective of out-level power systems, GVPPs serve as spinning reserves for power support under contingencies. Besides, the key problems to be solved in the development of the GVPP-based architecture are summarized. Although the architecture is proposed for the power system in China, it can be applied to any power systems with similar challenges.
1. Introduction
With the fast development of non-synchronous renewable energy sources (RESs), such as wind turbine generators (WTGs) and photovoltaic (PV) panels, the characteristics of power system dynamic response have changed significantly. The RESs have strong volatility and uncertainty and low inertia, which reduces the controllability of power systems [1,2,3]. So, power systems are facing great challenges on the accommodation of RESs. On the other hand, the prices of energy storage systems (ESSs) have decreased rapidly and become accessible in large-scale industrial application [4]. Additionally, the continuous development of electric vehicle (EV) technology increases the number of users and makes the vehicle-to-grid (V2G) possess the potential of bidirectional power regulation when power systems are subjected to large disturbances [5,6]. Thus, the non-synchronous RESs, ESSs, and EVs complicate the interaction mechanisms of power system dynamics, and may aggravate power system security and stability.
The distributed form is a more flexible way than the centralized one to integrate RESs, ESSs, and EVs. The distributed energy resources (DERs) have become an essential part of power systems. Moreover, the micro-grid and active distribution network (ADN) have been widely used. The micro-grid is a small autonomous system to realize the efficient utilization of DERs, which disconnects from the power systems under contingencies to keep its secure operation [7,8]. With the flexible adjustment of network topology and DERs, the ADN is designed to manage power flow and smooth exchange power at the point of common coupling (PCC) [9,10]. To a certain degree, the micro-grid and ADN can promote the accommodation of DERs. However, there are few researches on the power support for power systems after large disturbances. As the penetration of DERs increases, the ability of these resources to participate in power system security and stability control becomes necessary and urgent.
Based on the advanced communication and control technologies, the virtual power plant (VPP) has been proposed to aggregate DERs for power and auxiliary service markets [11,12,13]. VPPs can include different types of DERs, such as traditional generators, RESs, ESSs, and EVs. These DERs can have different installed capacities and geographical sites, which are virtually aggregated through advanced communication and control methods. More specially, the optimal planning [14,15,16], bidding [17,18,19,20], dispatching [21,22,23,24], and communication architecture design [25,26,27,28] of VPPs have been studied.
As for the planning of VPPs, the volatility and complementarity of RESs should be taken into account, and the investments, risks, and profits should be traded off. An equivalent VPP model has been proposed using the probability density function, of which the performance is assessed from different aspects [14]. Then, the ESSs are added in the above VPP model, and the performance of augmented VPPs in improving generation adequacy is quantified [15]. Moreover, the installed capacities of DERs and electricity prices have been optimized considering the economic and secure operation of a power system [16].
The VPP has been widely used in electricity and auxiliary service markets, and various bidding methods have been proposed. A three-stage mixed-integer stochastic programming model has been proposed for the bidding of VPPs, in which the uncertainties and battery degradation of EVs are considered [17]. In order to minimize the cost of VPPs in the day-ahead market, a stochastic optimization model has been established [18]. Based on the game theory, both the models for a single VPP and multiple VPPs have been proposed, where the interactive coordination between VPPs and energy consumers is considered [19]. Moreover, a two-stage robust optimization approach is provided to obtain the bidding strategy of a VPP in the day-ahead and real-time markets [20].
Considering the requirements of power system operation, the regional supply-demand balance is met by the optimal VPP dispatch. A dispatch model has been established to optimize the performance of multi-energy VPPs, where the economic cost and power quality are taken as the optimization objectives [21]. Moreover, based on the decision area division method, a multi-objective optimization model for VPPs has been established, and the average daily cost, load characteristics, and degree of RES accommodation and aggregation have been compromised [22]. In addition, the comprehensive prices for active and reactive power have been designed, on which a bi-level programming approach is proposed for the collaborative management of multiple VPPs [23]. Considering the uncertainty of multi-energy VPP operation, a scenario-based optimization approach has been proposed, which is applied to an electricity-hydrogen VPP [24].
Regarding the architecture design of VPPs, the communication system is one of the key infrastructures, on which the data collection and command transmission can be performed. With the utilization of standard-based power system communications, a service-oriented VPP architecture has been designed for the seamless integration of DERs [25]. Moreover, the communication, information, and functional requirements of VPPs have been analyzed, and the IEC 61850 protocol has been used to realize the interaction between the VPP controller and DERs [26]. In addition, the IEC 60870-5-104 protocol has been applied to a VPP, whose communication quality is quantified as latency, packet loss, retransmissions, bandwidth, amount of traffic, and message patterns [27]. Besides, the VPP architecture using the OpenADR 2.0b protocol has been established to operate DERs securely and reliably and provide auxiliary services [28].
As mentioned above, there have been numerous researches on the optimal planning, bidding, dispatching, and communication architecture design of VPPs, which are mainly concentrated on economic efficiency and engineering realization. However, there are a few researches on how VPPs can take part in power system security and stability control.
Because of the problems of energy accommodation and power system security and stability caused by RESs, the concept of grid-friendly has attracted more and more attention [29,30,31]. The grid-friendly technology is proposed to improve the grid-connection performance of RESs to decrease the influence of volatility, uncertainty, and low inertia, and enhance the control ability of power system to deal with large disturbances. Besides establishing VPPs for power markets and economic efficiency, the VPP can be designed with grid-friendly characteristics, and used as spinning reserve for power systems under contingencies. The grid-friendly VPP (GVPP) is promising to solve the problems of RES accommodation and power system security and stability simultaneously.
In this paper, a GVPP-based dispatch and control architecture for the power system in China is proposed to accommodate RESs flexibly and securely. Although the architecture is proposed for the China state grid, it can be applied to any similar power systems with high penetration of RESs. The contributions of this paper are listed as below:
- The challenges stemming from non-synchronous RESs to the dispatch and control system of the power system in China are analyzed.
- The functional requirements, concept, and fundamental design of the GVPP are provided, which has grid-friendly characteristics and contributes to improve RES accommodation.
- A bi-level dispatch and control architecture is established based on the GVPP, considering two objectives to reduce the curtailment of local RESs and provide emergency power support.
- The key problems to be solved in the development of the GVPP-based architecture are summarized, which are helpful for further and important researches in this field.
The remainder of the paper is organized as follows. In Section 2, the typical dispatch and control system and underlying challenges of the power system in China are presented. Moreover, the establishment of the GVPP is elaborated in Section 3. The GVPP-based dispatch and control architecture is proposed in Section 4. Moreover, in Section 5, the key problems to be solved are summarized. Finally, the conclusions are drawn in Section 6.
2. State-of-the-Art and Challenges of China Power System
2.1. Current Dispatch and Control System
From the perspective of scale and stability characteristics, the China state grid is becoming the largest and most complicated power system in the world. Up to the summer of 2020, the interprovincial transmission power of the state grid has reached 72 million kW. Moreover, the peak load of the power system in China has exceeded the load of most developed countries, and accounted for about 40% of the load of European Union. Hence, there are great difficulties in the dispatch and control of the power system in China.
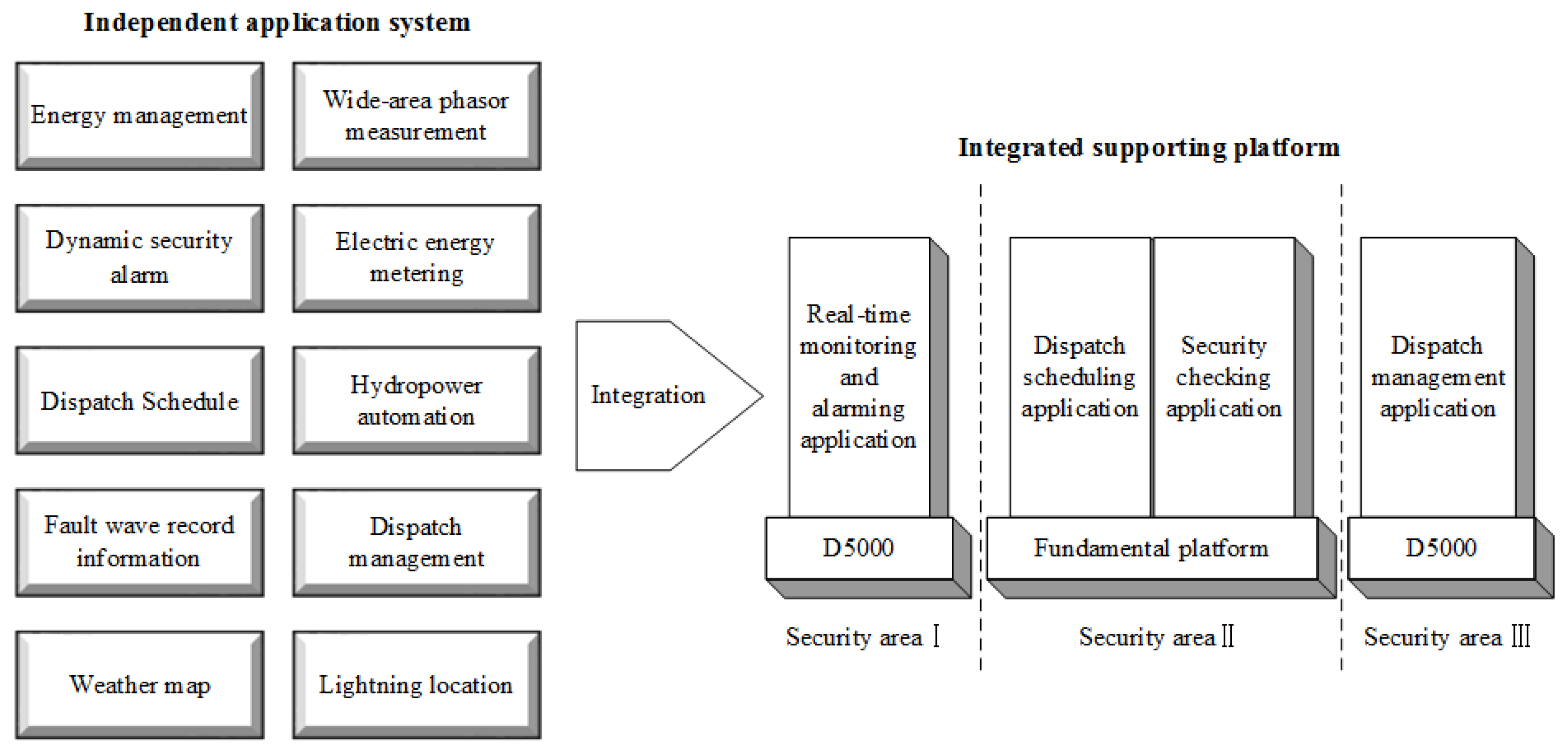
The dispatch system of the China state grid can be divided into the national, sub-national, and provincial levels. More specially, the dispatch system follows the component-based and service-oriented rule and is established with the aim of horizontal integration and vertical connection. The horizontal integration of the dispatch system can be demonstrated in Figure 1. The original supervisory control and data acquisition (SCADA), energy management system (EMS), hydropower automation system, electric energy metering system, wide-area measurement system (WAMS), dispatch schedule system, weather map system, lightning location system, dynamic security alarm system, dispatch management system, fault wave record information system, and so on more than 10 independent applications have been integrated into the dispatch system. Moreover, the bottom level of the dispatch system is the integrated supporting platform that contains three security regions. The real-time monitoring and alarming applications are deployed in the security area I. The applications of dispatch scheduling and security checking lie in the security area II. Furthermore, in the security area III, the applications of dispatch management are deployed.
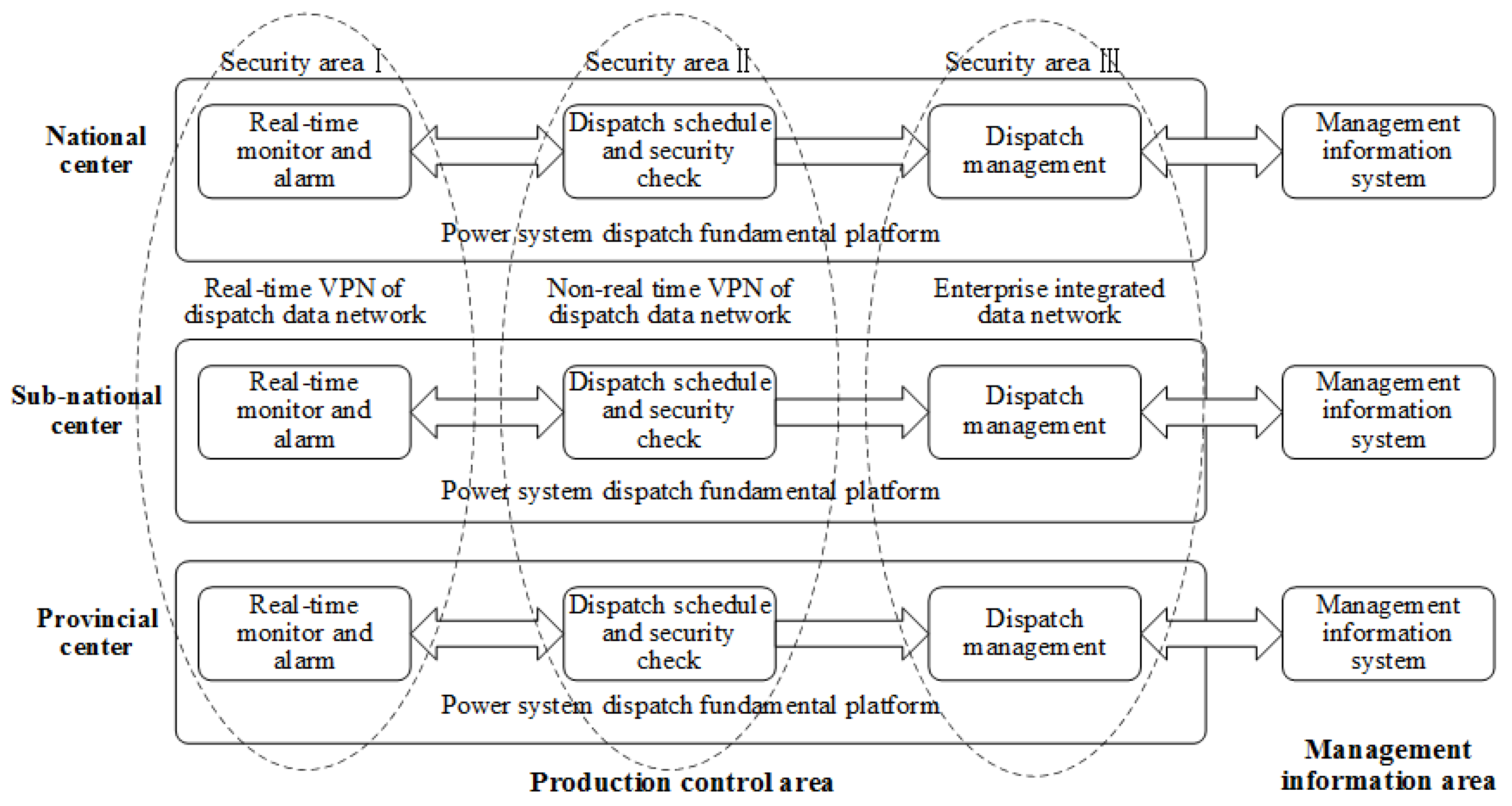
The vertical connection of the dispatch system can be shown in Figure 2. The national, sub-national, and provincial levels of the dispatch system should keep integrated operation. The virtual private network (VPN) is used to connect the different levels. More specially, the security area I of each level is connected via the real-time VPN of dispatch data network. In addition, the security area II of each level is connected by the non-real time VPN of dispatch data network. The VPN of the enterprise integrated data network is utilized to connect the security area III of each level.
On the other hand, the power system is a large-scale, nonlinear, and time-varying system, which is depicted as differential-difference-logical-algebraic equations. Moreover, the severity and position of underlying disturbances are probabilistic. Thus, it is necessary to ensure the security and stability of power systems and counteract probabilistic contingencies.
The security and stability control system of the state grid can be divided into three defense-lines [32], as shown in Figure 3. The first defense line is designed to deal with the minor disturbances, and ensure the connection of power sources and loads, in which the preventative control measures are deployed. For example, the topology of power systems can be enhanced during the planning and construction periods. Under normal condition, the unit commitment can be carried out to increase the adjusting ability for active and reactive power. Moreover, the power system stabilizer (PSS), parallel and series capacitance compensation, dynamic reactive power compensation device (SVC), static reactive power compensator (STATCOM), and so on technologies can be utilized. After faults occurring, the relay protection devices isolate the faults from the grid promptly, which can expand the stability domain of power systems. If the first defense-line is capable to transfer the operation point of power systems into the stability region of contingency set, there will be no need to take other measures to ensure power system stability.
The aim of the second defense-line is to reduce the risk of power system instability under severe disturbances. Because of the additional cost and the conflicts among different contingencies, it is not appropriate to ensure power system stability only by the first defense-line. Thus, the emergency control measures of the second defense-line should be deployed for load shedding and generator tripping after detecting the disturbances. For example, the network splitting, generator tripping, load shedding, fast excitation, fast valving, and dynamic braking can be carried out. Although the emergency control measures bring about large cost, the second defense-line is activated only when the disturbances that may lead to instability take place, and there is no additional cost under normal condition.
Considering the risk of under-control or even rejection of the former defense-lines, the third line is deployed to avoid power system blackout under extremely severe disturbances. The corrective control measures are carried out, if the third defense-line is triggered. More specially, the corrective measures are driven by the variables of power system dynamic response, such as under-frequency load shedding (UFLS) and under-voltage load shedding (UVLS).
2.2. Underlying Challenges
As mentioned above, the dispatch and control system is useful for the economic and stable operation of the power system in China. However, with the fast development of RESs and DESs, the composition, structure, and operation characteristics of power systems are changing. The above dispatch and control system is facing great challenges, which hinder the accommodation of RESs and impair the security and stability of power systems.
In summary, the underlying challenges can be listed as follows.
- The fluctuant and uncertain characteristics of RESs.
The wind and solar energies are the two main kinds of RESs, which have the inherent fluctuant and uncertain characteristics. With the increasing penetration of wind and solar energies, the power system should not only meet the fluctuant and uncertain loads but also take additional measures to deal with the output power of RESs. More and faster spinning reserves are needed to handle the double-side fluctuations and uncertainties. More specially, as analyzed in our earlier work [1,33], the hourly ramp rates of wind and solar energies can come up to 0.5393 pu/h and 0.3449 pu/h, respectively, and the corresponding spinning reserves should be deployed to smooth the net ramp of RESs and loads. Moreover, the complementarities between wind and solar energies can be used to reduce the fluctuations and uncertainties, but the rational utilization forms, planning schemes, and control strategies should be considered thoroughly. The limited spinning reserves and adjustment capability restrict the accommodation of RESs and compel the power system close to the boundary of stability region. Thus, there is a conflict between the continuous accommodation of RESs and keeping the security and stability of power systems. Moreover, how to securely accommodate the fluctuant and uncertain RESs becomes a challenge.
- 2.
- The low- or no-inertia characteristics of non-synchronous RESs.
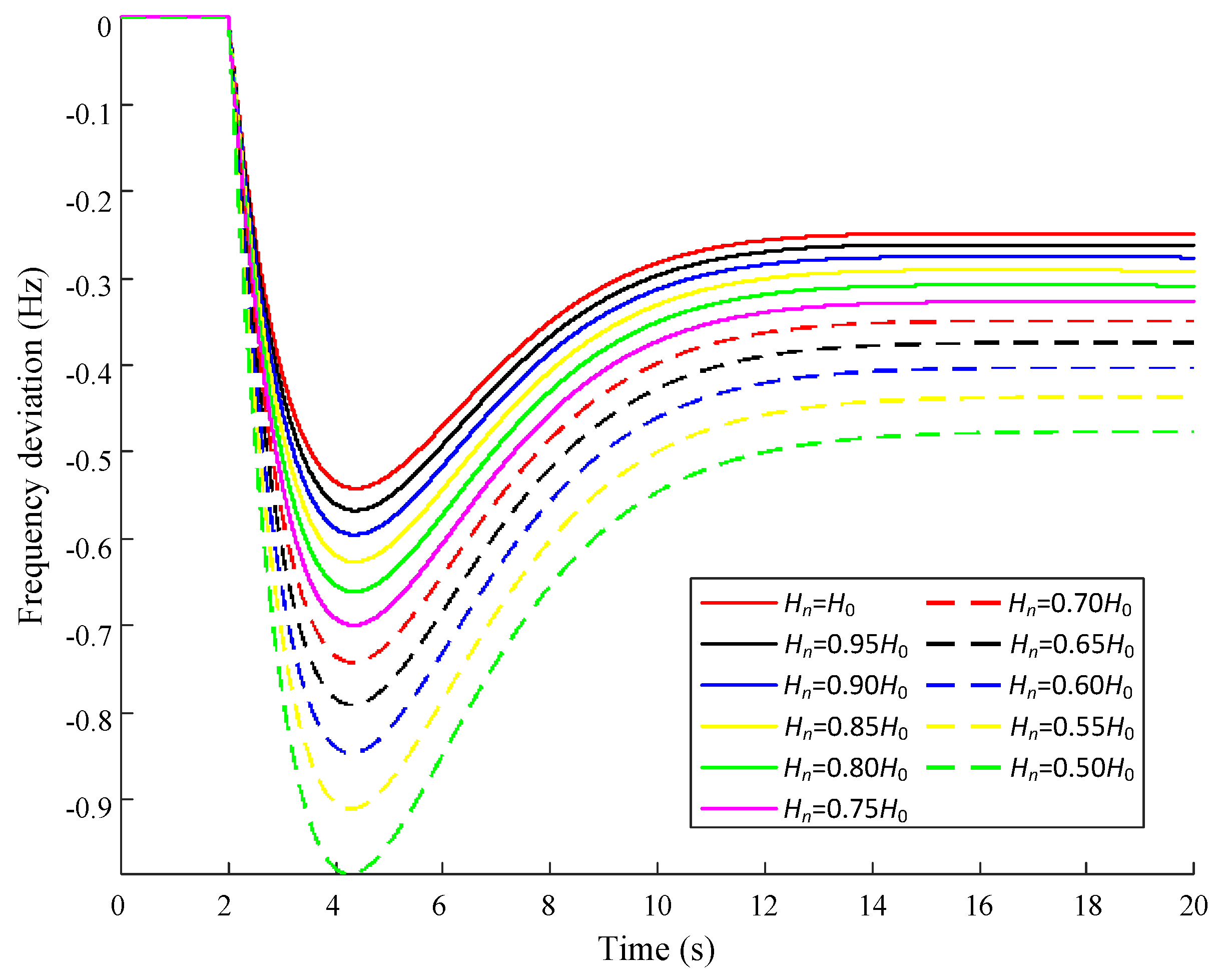
As the power electronic technologies develop, the ratio of power sources with electronic interfaces in power system increases promptly. Although the power electronic devices have high controllability, the power sources usually operates in asynchronous mode. The output active power and reactive power of inverter-based sources are usually fixed values, considering the uncontrollable characteristics of their primary energy resources. There is no frequency or voltage response from these power sources, which leads to the decrease of equivalent inertia and control capability of the power system with high ratio of power electronic devices. Furthermore, the decrease of equivalent inertia brings about more drastic frequency dynamic response when the power system is subjected to the same disturbances, as shown in Figure 4.
In the analysis, the generating capacity of thermal units is assumed to be replaced by the inverter-based power sources, so the equivalent inertia H of the studied system decreases. H0 is the initial inertia of the studied system without inverter-based power sources. From Figure 4, it is obvious that the magnitude of rate of change of frequency (ROCOF) increases and the frequency nadir decreases as the equivalent inertia H decreases. Moreover, because the control capability of the studied systems also decreases, the quasi-steady frequency deviation grows. To a certain degree, the integration of power electronic devices decreases the equivalent inertia, and aggravates frequency stability of power systems, and the RESs usually use the inverter-based integration form. Thus, how to adjust the equivalent inertia of power systems with high ratio of power electronic devices is also a challenge.
- 3.
- The low-observability and controllability characteristics of DESs.
In the above dispatch and control system, the centralized RESs are monitored, dispatched, and controlled. However, there is low observability and controllability of DERs for the dispatch and control center, which are equivalent to negative loads. Under normal condition, the DERs operate independently and lack coordinated dispatch, which reduces the accommodation capability of DERs and influences the overall economic efficiency of power systems. Moreover, when power systems are subjected to large disturbances, the DERs deployed in micro-grid or ADN do not provide effective power support, and even reduce output to protect themselves, which in turn may increase the severity of the occurred disturbances. Thus, how to aggregate and utilize DERs for enhancing the RES accommodation and power support is a challenge.
- 4.
- The high cost and limited accuracy of discrete stability control measures.
In the above second and third defense-lines, the discrete control measures, especially load shedding, are the main resorts to ensure power system stability. From the perspective of economy efficiency and social influence, these control measures usually bring about high cost. Moreover, the discrete measures are not immune to over- or under-control problem and have limited accuracy, in which the stage-by-stage scheme is used.
Taking the frequency stability control process as an instance, the emergency load shedding (ELS) in the second defense-line and UFLS in the third defense-line are activated to intercept frequency decline and ensure frequency stability, as shown in Figure 5. There is no doubt that the load shedding brings about high cost and negative social influence. Moreover, the ELS is activated by the detection of event signal and starts at about 300 ms after the disturbance [34]. The ELS is single-stage load shedding, after which the multi-stage UFLS starts. The UFLS is activated by the thresholds of frequency deviation and its duration. Only when the time of frequency deviation exceeds the duration threshold, the corresponding stage of UFLS will take effects. The frequency difference of continues two stages of the China state grid is 0.25 Hz, and so the control accuracy of UFLS comes up to 0.25 Hz. Furthermore, the first stage of UFLS starts at 49.25 Hz, which is around 2~4 s after the disturbance. The actuation time of ELS is about 300 ms while the time of UFLS is about 2~4 s. The time lag between the two control measures is about 4 s in extreme condition. So the control accuracy of ELS and UFLS are limited in terms of the granularity of actuation frequency and time.
The control measures of the second and third defense-lines are crucial for power system stability. Moreover, the integration of RESs increases the probability and severity of underlying disturbances. The high cost and limited accuracy of discrete stability control measures are becoming obstacles for the accommodation of RESs. Thus, how to decrease the cost and increase the performance of power system stability control measures is a challenge.
3. Establishment of the GVPP
3.1. Functional Requirement for the GVPP
The aim of the GVPP is to promote the accommodation of RESs and enhance the security and stability of power systems. According to the above analysis of underlying challenges, the functional requirements of GVPP can be listed as below:
- The GVPP should be capable to decrease the influence of volatility and uncertainty of non-synchronous RESs on power systems.
- The GVPP should aggregate DERs and improve their observability and controllability for the participation in power system dispatch and control.
- The GVPP should be capable to improve the control accuracy of discrete stability control measures.
- The GVPP should provide flexible controllable resources to displace the high-cost load shedding and generator tripping.
As for the relation between underlying challenges and functional requirements, the functional requirement (1) corresponds to the challenge (1). The functional requirement (2) is used to handle the challenge (3). In addition, the functional requirements (3) and (4) are utilized for the challenges (2) and (4). Furthermore, in order to realize the above functional requirements, the inner design of the GVPP and the outer architecture for the dispatch and control of GVPPs should be provided primarily.
3.2. Concept of the GVPP
The proposed GVPP is defined as: a virtual unit aggregates the wide-area DERs, such as traditional generators, WTGs, PV panels, EVs ESSs, and controllable loads through low-latency information and communication technologies, and can be dispatched and controlled corporately, so as to promote the accommodation of RESs under normal condition and enhance the security and stability of power system under contingencies.
The design philosophy of using grid-friendly technologies in GVPP is to establish the dominator role of the power system in the dispatch and control process, and the participant role of designed virtual units to provide auxiliary services. In addition, the GVPP brings the DERs into the security and stability control system, which converts the fluctuant, uncertain, low-inertia, and low-observable DERs to controllable resources. Moreover, the GVPP aggregates wide-area and dispersed DERs to provide more effective auxiliary services than traditional thermal and hydro generators, considering the incorporation of power electronic devices.
3.3. Design of the GVPP
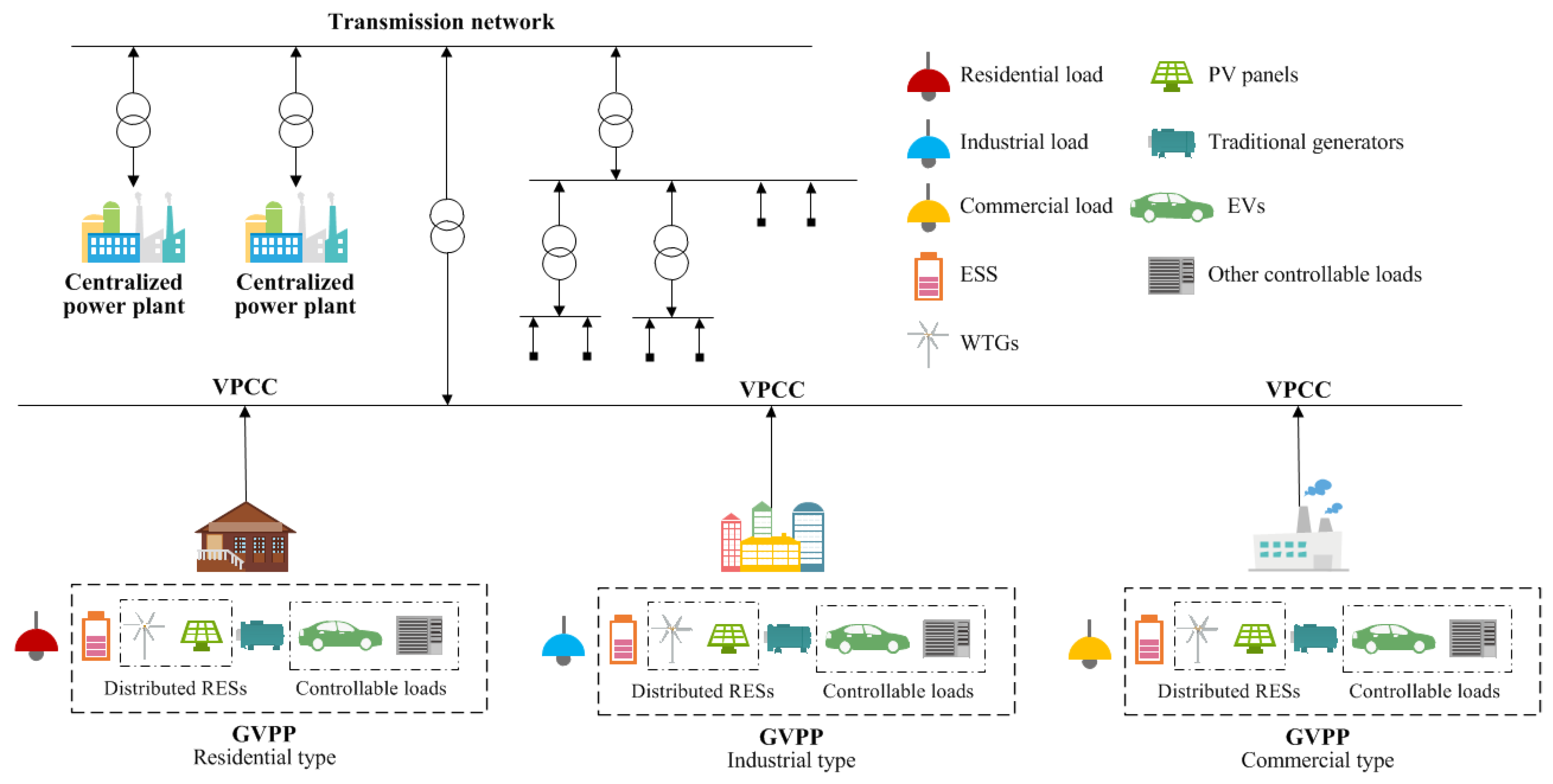
In order to realize the grid-friendly function, the resources of a virtual unit should be evaluated and controlled to promote the accommodation of RESs in the inner level, operate as spinning reserves for power support under contingencies, and respond to commands from the system level. Because of the spatial distribution of aggregated DERs, the GVPP virtualize all the DERs into a single point, which is represented as a virtual PCC (VPCC). In the system level, the output characteristics of a single VPCC rather than the numerous PCCs of inner DERs are detected and controlled. The proposed GVPP is demonstrated in Figure 6.
Considering the types of consumers, the GVPP can be classified into three types with residential, industrial, and commercial loads, respectively. GVPP can incorporate the uncontrollable loads, traditional generators, RESs, ESSs, and controllable loads, and so on. More specially, the crucial loads, such as government, hospital, and precision production, in the region of a GVPP are uncontrollable, of which the forced outage may lead to great loss. The output power of RESs, such as WTGs and PV panels, can be adjusted by adding strategies to their control systems. But the control performances of RESs are restricted by their primary energy resources. Thus, the high-controllable generators and ESSs are necessary to establish a GVPP. In addition, the controllable loads, such as EVs, air conditioners, and water heaters, can be used to enhance the controllability of GVPPs, whose interruption results in little cost.
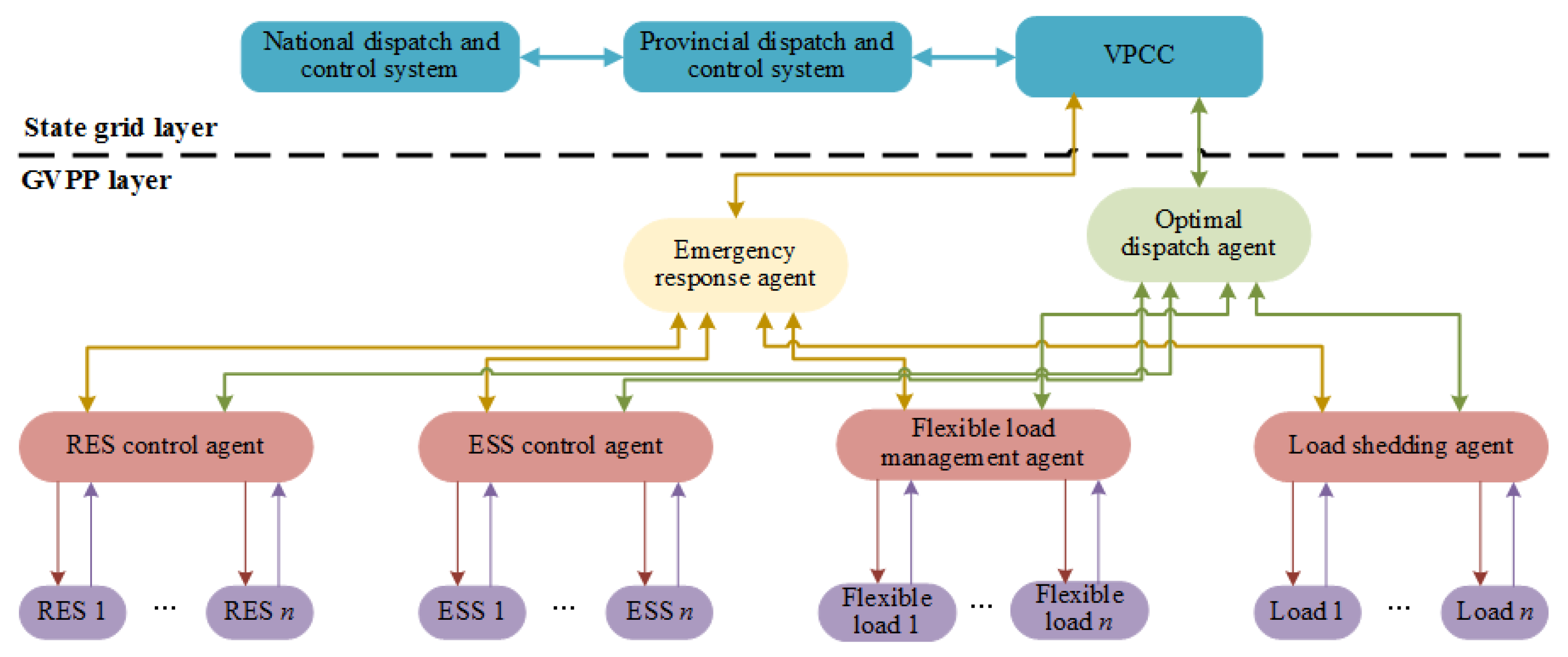
In order to realize the operation, the inner architecture of a GVPP is provided based on multi-agent technologies, as shown in Figure 7. The two layers of the GVPP and state grid are included. The GVPP layer is the main part of the architecture, which consists of the energy assets in Figure 6, inner network topology, and the corresponding control systems. Moreover, the GVPP layer interacts with the state grid layer through VPCCs. In the state grid layer, the agents and entities corresponding to the dispatch and control system, and other infrastructures, such as centralized power plants, transmission network, and network network, are incorporated.
In addition, the physical, communication, and control agents are deployed and integrated to realize the operation of a GVPP. The physical agents abstract the energy assets of GVPPs, so as to depict and estimate the state of these assets. Considering the spatial distribution of aggregated energy assets, the communication agents are necessary, which exchange information among agents, and transfer data and commands between the GVPP and state grid layers. Moreover, the control agents operate to manage the states of energy assets, of which the output power and on-off status are adjusted.
From Figure 7, the control agents consist of the optimal dispatch agent, emergency response agent, RES control agent, ESS control agent, flexible load management agent, and load shedding agent. More specially, the optimal dispatch agent provides the operation strategies of the GVPP under normal condition. In addition, the emergency response agent is activated when the power system is subjected to large disturbances. The emergency response agent will displace the optimal dispatch agent and take over the control of the GVPP to provide grid-friendly power support for the power system. The RES control agent determines the operation strategies of RESs, such as the distributed WTGs and PV panels. Additionally, the charging and discharging power of ESSs is managed by the ESS control agent. The flexible load management agent is deployed to carry out the flexible demand response of EVs, air conditioners, water heaters, and so on. Furthermore, the load shedding agent is utilized to deal with the extreme contingencies and prevent power system collapse.
The proposed GVPP aggregates wide-area DERs to participate in power system dispatch and control, which is capable to meet the functional requirement (2). The functional requirement (1) is realized via the optimal dispatch agent, in which the accommodation of RESs and the smooth of net output power should be considered. Furthermore, after disturbances, the emergency response agent adjusts the GVPP to provide continuous power support and meets the functional requirements (3) and (4). In contrast to the general VPPs, micro-grids, and ADNs, the proposed GVPP is designed to support power systems rather than protecting itself.
4. Bi-Level Dispatch and Control Architecture
4.1. Structure and Composition
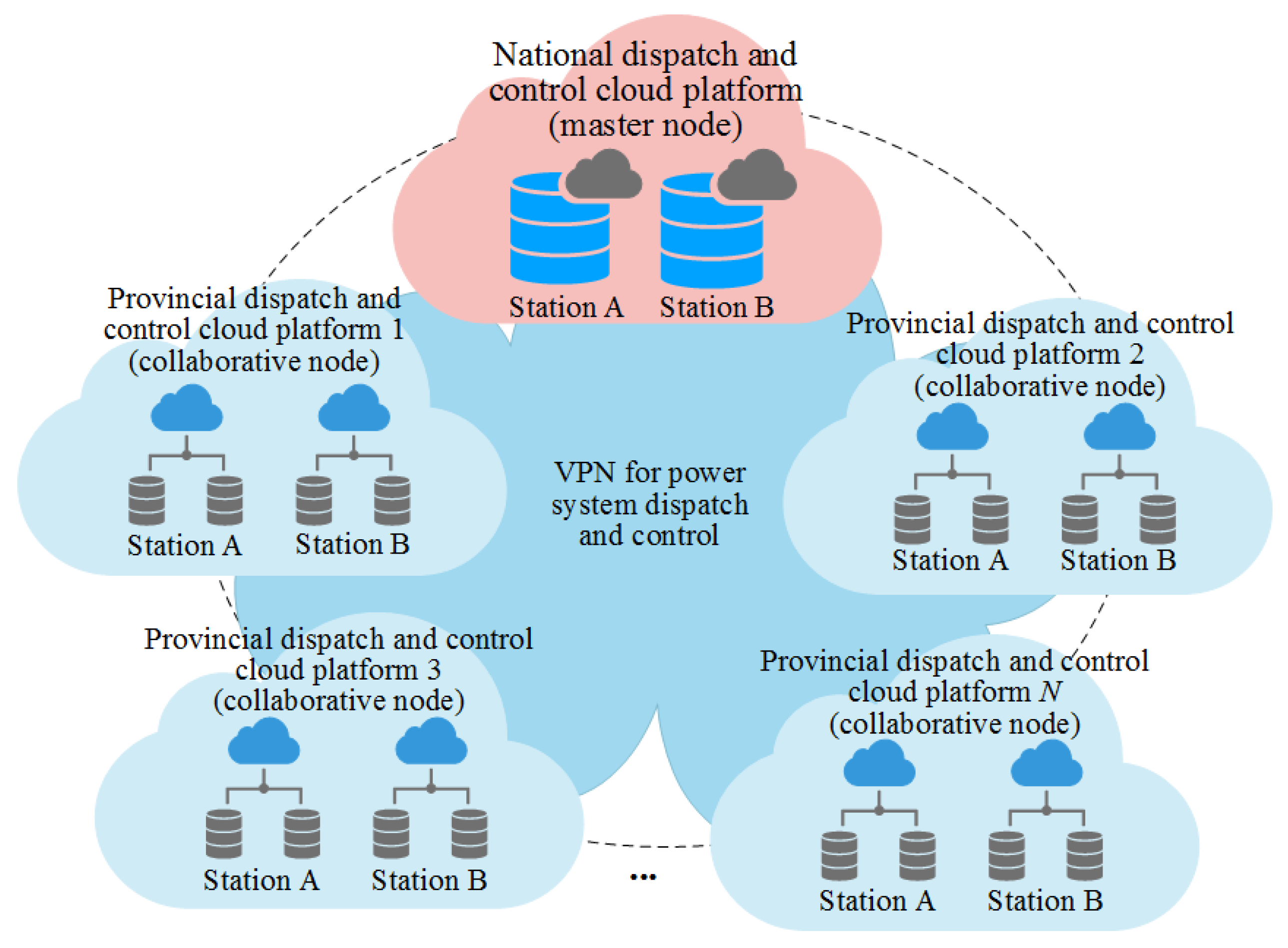
As mentioned above, the GVPP is designed as a grid-friendly and autonomous virtual unit, which interacts with the power system through the VPCC. Thus, the inner operation of the GVPP and the output characteristics of the VPCC should be controlled. Based on the cloud platform of the China state grid, a bi-level dispatch and control architecture is proposed to realize the integration of GVPPs into the power system.
The cloud platform of the China state grid is shown in Figure 8, and N is the number of provincial platforms. The VPN for power system dispatch and control is established. Furthermore, the national platform is set as the master node, and the N provincial platforms are collaborative nodes, which constitutes a “1+N” framework. The national platform is the core and performs the analysis, dispatch, and control functions at the voltage level of 220 kV. The provincial platforms carry out these functions at the voltage level of 10 kV.
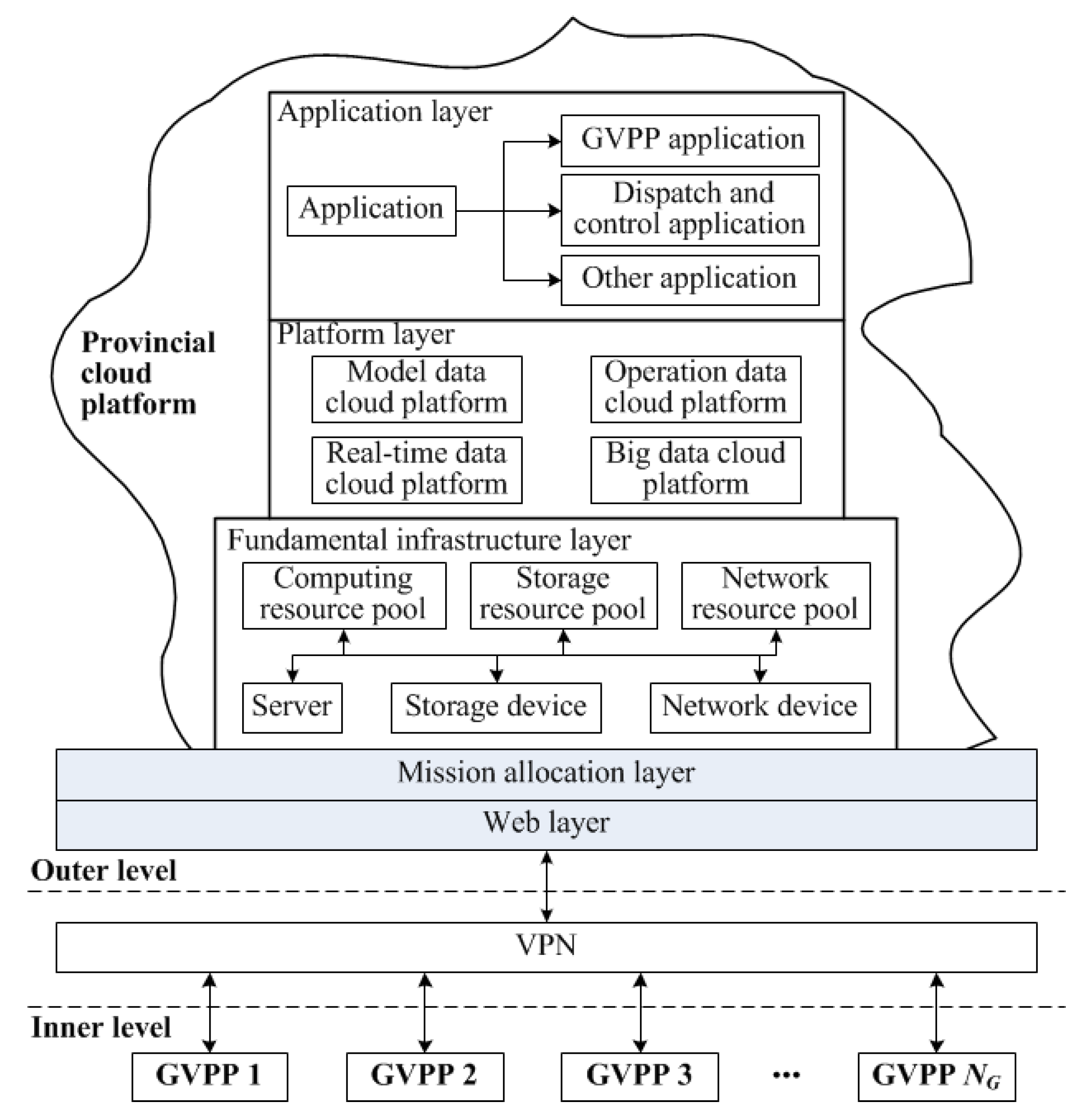
According to the above cloud structure, GVPPs can be integrated into the provincial platform and participate in power system dispatch and control. In order to respond to the commands from the provincial platform, the GVPP should aggregate enough DERs to assure sufficient control capability and be integrated into the power system at the voltage level of 10 kV or 35 kV through step-up transformers. Moreover, considering the grid-friendly characteristics, the GVPP can operate as traditional thermal and hydro units, and even have superior performance. So, the GVPP is integrated into the provincial cloud platforms like traditional power plants, and a bi-level dispatch and control architecture is established, as shown in Figure 9, and NG is the number of GVPPs.
From Figure 9, the inner level and outer level of the proposed architecture are the GVPPs and provincial cloud platform, respectively. In the inner level, the GVPP operates autonomously and preserves a certain amount of adjustment capability for the power system. So, GVPPs can participate in power system stability control under major disturbances. In the outer level, the cloud platform coordinates the NG GVPPs, traditional power plants, and other controllable resources for economic and stable operation.
Furthermore, the web layer is the interface that GVPPs and other units interact with the cloud platform. The mission allocation layer distributes the computation and storage requests to corresponding devices. Moreover, the GVPP is controlled by the inner optimal dispatch agent and emergency response agent, which communicate with the cloud platform through the VPN and web layer. The application layer performs the decision-making on dispatch and control, of which the process is supported by the platform and fundamental infrastructure layers.
4.2. Inner-Level Operation Strategy
The aim of the GVPP is to promote the accommodation of RESs and provide continuous power support. Moreover, in the inner level of the proposed architecture, each GVPP is controlled by its own optimal dispatch agent or emergency response agent according to the operation states of the power system. So the inner-level dispatch and control strategy should be divided into the normal and emergency modes.
Considering the functional requirements, the accommodation of RESs and the smooth of net output power are considered in the normal mode. The economic efficiency of each GVPP should be taken into account. Thus, the operation strategy of the normal mode is a multi-objective optimization problem, and the output power of corresponding DERs should be determined.
In the normal mode, the optimization objectives can be composed of the operation cost , the amount of RES curtailment , the root mean error between actual output power and out-level commands, and the standard deviation of output power, which are represented as,
where is the objective functions of the normal mode and ; , , , and are corresponding objective functions; are the decision variables and,
where , , , and are the commands for traditional generators, RESs, ESSs, and controllable loads, respectively, and , , , and ; is the length of optimization window; , , , and are the number of deployed traditional generators, RESs, ESSs, and controllable loads, respectively.
Additionally, some equality and inequality constraints should be satisfied, which can be represented as,
where and are the functions of equality and inequality constraints, respectively, and,
where , , , , , and are the equality constraints of power flow and stability, power reserve, traditional generators, RESs, ESSs, and controllable loads, respectively; , , , , , and are the inequality constraints of power flow and stability, power reserve, traditional generators, RESs, ESSs, and controllable loads, respectively.
Therefore, the optimization model for the inner-level GVPP operation in the normal mode can be expressed as,
In the emergency mode, the emergency response agent will displace the optimal dispatch agent, and the GVPP starts to provide power support for the power system. As for the control objectives, the accommodation of RESs and the smooth of net output power can be neglected. Moreover, the load shedding agent can be actuated. Thus, the objective functions of the emergency operation mode can be expressed as,
where is the objective functions of the emergency operation mode and ; and are corresponding objective functions; is the decision variables and,
where is the commands for load shedding and ; is the number of deployed load shedding devices.
Additionally, in the emergency mode, the constraints of power reserve can be neglected. The equality and inequality constraints can be represented as,
where and are the functions of equality and inequality constraints, respectively, and,
where , , , , , and are the equality constraints of power flow and stability, traditional generators, RESs, ESSs, controllable loads, and load shedding, respectively; , , , , , and are the inequality constraints of power flow and stability, traditional generators, RESs, ESSs, controllable loads, and load shedding, respectively.
Therefore, the optimization model for the inner-level GVPP operation in the emergency mode can be expressed as,
4.3. Outer-Level Operation Strategy
In the outer level of the architecture, the GVPPs and other controllable resources are coordinated for the economic and stable operation. Similar to the inner-level operation strategy, the outer-level strategy can be divided into the normal and emergency modes.
In the normal mode, the operation cost and the amount of RES curtailment are taken as optimization objectives, which can be expressed as,
where is the objective functions of the normal mode and ; and are corresponding objective functions; are the decision variables and,
where and are the commands for GVPPs and other controllable resources, respectively, and and ; is the number of other controllable resources.
Additionally, some equality and inequality constraints should be satisfied, which can be represented as,
where and are the functions of equality and inequality constraints, respectively, and,
where , , , and are the equality constraints of power flow and stability, power reserve, GVPPs and other controllable resources, respectively; , , , and are the inequality constraints of power flow and stability, power reserve, GVPPs, and other controllable resources, respectively.
Therefore, the optimization model for the outer-level operation in the normal mode can be expressed as,
In the emergency mode, GVPPs start to provide power support, and so the commands for GVPPs should be adjusted to handle the active power deficits. The frequency deviation of the center of inertia (COI) is used for the adjustment. Furthermore, the additional power for GVPP clusters can be calculated as,
where is the th additional power for GVPP clusters; and are the proportion and differential coefficients, respectively; is the control interval.
Then, the additional power for each GVPP is optimized and the control cost is taken as the objective, which can be represented as,
where is the objective function; is the th additional power for GVPPs, and .
Additionally, some equality and inequality constraints should be satisfied, which can be represented as,
where are the functions of inequality constraint of GVPPs, and is the th commands for GVPPs.
Thus, the optimization model in the emergency mode can be expressed as,
4.4. Overall Operation Strategy
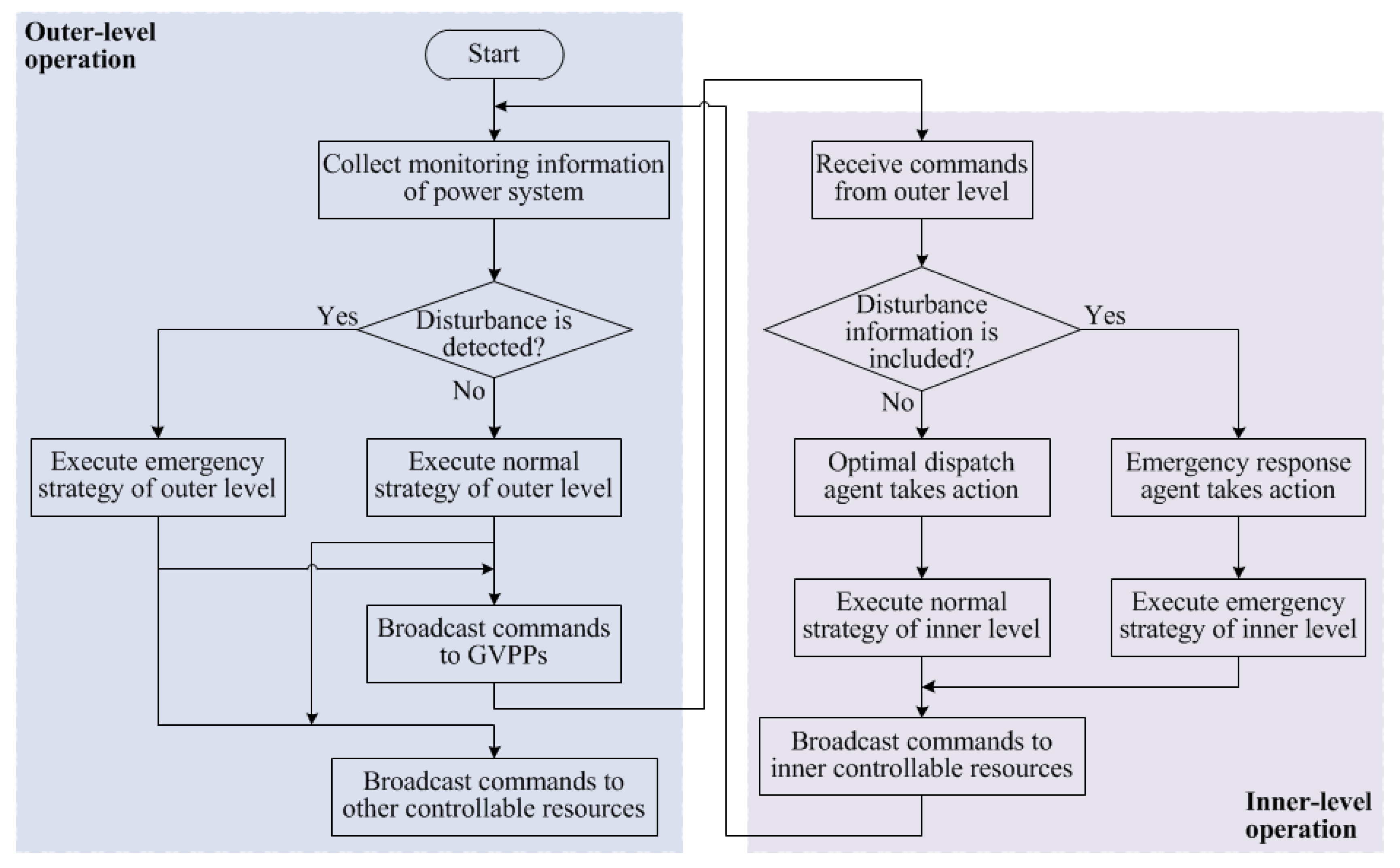
As mentioned above, the inner- and outer-level operation strategies are designed with different objectives and depicted through optimization models. More specially, Equations (7), (14), and (21) are multi-objective optimization models, and Equation (26) is a mono-objective optimization model. The typical multi-objective optimization methods, e.g., the multi-objective particle swarm optimization algorithm [3], multi-objective genetic algorithm [35], and multi-criteria decision analysis [36], can be applied to Equations (7), (14), and (21). Moreover, the mono-objective optimization method, e.g., the particle swarm optimization algorithm [37] and genetic algorithm [38], is effective to solve Equation (26). So the commands of output power for controllable resources can be obtained by solving the optimization models. Furthermore, the overall operation logic of the bi-level dispatch and control architecture can be seen in Figure 10.
According to Figure 10, the operation of the bi-level dispatch and control architecture is listed below:
- Collect monitoring information of the controlled power system in the outer-level dispatch and control platform.
- If the disturbance is detected, execute the emergency operation strategy of the outer level; otherwise, execute the normal operation strategy of the outer level.
- Broadcast commands from the outer-level dispatch and control platform to GVPPs and other controllable resources.
- The outer-level commands are received and updated in the inner level.
- If disturbance information is involved, start the emergency response agent and execute the emergency operation strategy of the inner level; otherwise, start the normal dispatch agent and execute the normal operation strategy of the inner level.
- Broadcast commands to inner controllable resources, and return monitoring information to the outer-level dispatch and control platform.
5. Key Problems for the Development of the GVPP
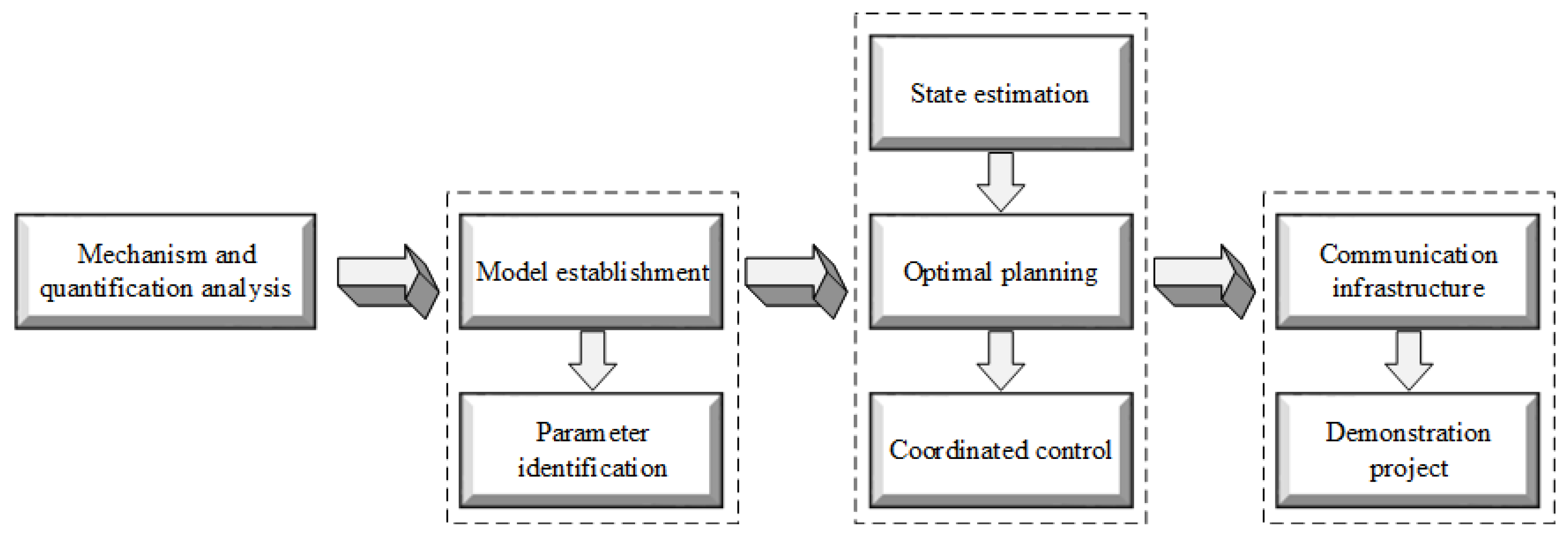
In this paper, the concept, fundamental design, and dispatch and control architecture of GVPPs are proposed. But this research on GVPPs is preliminary. Moreover, the operation strategies of GVPPs are various and system specified, only one of which is discussed. There are key problems and research directions for the development of GVPPs. Therefore, the suggestions for further research in this field can be depicted in Figure 11 and summarized as follows.
- The mechanism and quantification analysis of the interaction between GVPPs and power systems.
The GVPP consists of diversified and heterogeneous DERs, which have distinguished operation characteristics and bring about different impacts on power systems. So the interaction between a single GVPP and power systems is complicated. In addition, the cooperation of GVPPs makes the interaction more complex. The impacts of GVPPs on power systems should be figured out before large-scale application. Thus, how to analyze the interaction between GVPPs and power systems will be the future requirement of large-scale GVPP integration.
- 2.
- The model establishment and parameter identification for GVPPs.
The model and parameter are the basis of the analysis and optimization for GVPPs. Moreover, the composition of GVPPs makes the model complicated. However, the complexity of established model reduces the effectiveness on the on-line assessment and optimization. A compromise between the complexity and effectiveness should be made. Thus, how to establish an appropriate model and propose corresponding parameter identification approach is a problem to be researched urgently.
The estimation of operation states for GVPPs.
In the GVPP, the RESs, especially WTGs and PV panels, are deployed, of which the operation states are time variant. So, the operation sates of GVPPs are influenced by the RESs and vary with the changing of meteorological condition, such as wind speed and solar irradiation. Moreover, the operation states of GVPPs are significant for the dispatch and control. Thus, how to estimate the operation states for GVPPs is also a problem to be researched.
- 3.
- The optimal planning for GVPPs.
The GVPP consists of numerous DERs, which are dispersed in space. The planning of a GVPP involves the sizing and siting of heterogeneous DERs. There are massive objectives, such as economic efficiency and RES accommodation, that should be taken into account and traded off. The optimization of GVPP planning is a high-dimensional, non-linear, and multi-objective mathematical problem. Moreover, the coordination planning of multiple GVPPs makes the mathematical problem more complicated. Thus, how to establish an optimization model for the planning of GVPPs and provide a high-efficiency solving approach involves extensive research.
- 4.
- The coordinated control strategy for GVPPs.
The control of GVPPs involves different time scales. The control objectives, constraint, and resources of GVPPs in normal and emergency conditions are different. Moreover, the coordination among GVPPs and the coordination between GVPPs and power systems should be considered. There are high-dimensional, non-linear, multi-objective, and multi-level control problems for a single GVPP, GVPPs, and power systems. Thus, how to control the GVPPs synergistically for the economic, secure and stable operation under different time scales and conditions remains unanswered.
- 5.
- The design of communication infrastructure and demonstration project for GVPPs.
As for the transmission of data and commands, the communication infrastructure is necessitated. Considering the integration of extensive DERs and GVPPs, there are high requirements on GVPPs with respect to the indices of latency, packet loss, retransmissions, bandwidth, and amount of traffic. The 5G communication technology is promising to realize the integration of dispersed units with acceptable capital cost, and deserves further research. In addition, there is still a need to explore the engineering application of the proposed GVPPs in power systems. Thus, the demonstration project is needed for large-scale application and is a future challenge for researchers.
6. Conclusions
A GVPP-based dispatch and control architecture is proposed for the flexible and secure accommodation of RESs. First, the challenges stemming from non-synchronous RESs to the China state grid are analyzed. Then, the functional requirements, concept, and fundamental design of the GVPP are provided so as to counteract the above challenges. In contrast to the general VPPs, micro-grids, and ADNs, the proposed GVPP is designed to support power systems rather than protect itself under contingencies. Besides, a bi-level dispatch and control architecture is established to integrate GVPPs, of which the operation strategy is discussed. In the inner level, the GVPP operates to promote the accommodation of RESs. From the perspective of out-level power systems, GVPPs serve as spinning reserves for emergency power support. Furthermore, the suggestions for further and important research on the GVPP are summarized. Although the architecture is proposed for the China state grid, it can be applied to any power systems with similar challenges.
The focus of this paper is on the concept and architecture of the GVPP. To some extent, this research on the GVPP is preliminary. In the future studies, the planning scheme and operation strategy for GVPPs will be optimized.
Author Contributions
Y.C. and H.Z. provided the conceptualization and methodology of the GVPP. Q.X. provided the research background, the establishment of the GVPP, and the bi-level dispatch and control architecture. W.Z. provided the state-of-the-art and challenges of the China state grid. V.T. provided the key problems and research directions of GVPPs. All the authors contributed to the writing and revising of the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This paper is supported by the National Natural Science Foundation of China (No. 51627811).
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| RESs | non-synchronous renewable energy sources |
| WTG | wind turbine generator |
| PV | photovoltaic |
| ESS | energy storage systems |
| EV | electric vehicle |
| V2G | vehicle-to-grid |
| DER | distributed energy resource |
| ADN | active distribution network |
| PCC | point of common coupling |
| VPP | virtual power plant |
| GVPP | grid-friendly virtual power plant |
| SCADA | supervisory control and data acquisition |
| EMS | energy management system |
| WAMS | wide-area measurement system |
| VPN | virtual private network |
| PSS | power system stabilizer |
| SVC | dynamic reactive power compensation device |
| STATCOM | static reactive power compensator |
| UFLS | under-frequency load shedding |
| UVLS | under-voltage load shedding |
| ROCOF | rate of change of frequency |
| ELS | emergency load shedding |
| VPCC | virtual point of common coupling |
References
- Zhang, H.; Cao, Y.; Zhang, Y.; Terzija, V. Quantitative synergy assessment of regional wind-solar energy resources based on MERRA reanalysis data. Appl. Energy 2018, 216, 172–182. [Google Scholar] [CrossRef]
- Zhao, J.; Lyu, X.; Fu, Y.; Hu, X.; Li, F. Coordinated microgrid frequency regulation based on DFIG variable coefficient using virtual inertia and primary frequency control. IEEE Trans. Energy Convers. 2016, 31, 833–845. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, Y.; Zhang, H.; Shi, X.; Terzija, V. Probabilistic optimal PV capacity planning for wind farm expansion based on NASA data. IEEE Trans. Sustain. Energy 2017, 8, 1291–1300. [Google Scholar] [CrossRef]
- Koiwa, K.; Tawara, T.; Watanabe, M.; Liu, K.-Z.; Zanma, T.; Tamura, J. Novel cost reduction method for wind farms associated with energy storage systems by optimal kinetic energy control. Appl. Sci. 2020, 10, 7223. [Google Scholar] [CrossRef]
- Wang, M.; Mu, Y.; Shi, Q.; Jia, H.; Li, F. Electric Vehicle Aggregator modeling and control for frequency regulation considering progressive state recovery. IEEE Trans. Smart Grid. 2020, 11, 4176–4189. [Google Scholar] [CrossRef]
- Ahmadian, A.; Sedghi, M.; Mohammadi-ivatloo, B.; Elkamel, A.; Golkar, M.A.; Fowler, M. Cost-benefit analysis of V2G implementation in distribution networks considering PEVs battery degradation. IEEE Trans. Sustain. Energy. 2018, 9, 961–970. [Google Scholar] [CrossRef]
- Khayat, Y.; Naderi, M.; Shafiee, Q.; Batmani, Y.; Fathi, M.; Guerrero, J.M.; Bevrani, H. Decentralized optimal frequency control in autonomous microgrids. IEEE Trans. Power Syst. 2019, 34, 2345–2353. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhao, R.; Yang, H.; Tang, S. Policies and demonstrations of micro-grids in China: A review. Renew. Sustain. Energy Rev. 2014, 29, 701–718. [Google Scholar] [CrossRef]
- Saboori, H.; Hemmati, R. Maximizing DISCO profit in active distribution networks by optimal planning of energy storage systems and distributed generators. Renew. Sustain. Energy Rev. 2017, 71, 356–372. [Google Scholar] [CrossRef]
- Cao, Y.; Xu, Q.; Zhang, H.; Yu, Q.; Gao, S.; Li, J. Comprehensive assessment of second-life battery energy storage system operation performance based on analytic hierarchy process. In Proceedings of the 2019 IEEE 2nd International Conference on Electronics Technology (ICET), Chengdu, China, 10–13 May 2019; pp. 451–456. [Google Scholar]
- Ghadi, M.J.; Ghavidel, S.; Rajabi, A.; Azizivahed, A.; Li, L.; Zhang, J. A review on economic and technical operation of active distribution systems. Renew. Sustain. Energy Rev. 2019, 104, 38–53. [Google Scholar] [CrossRef]
- Nosratabadi, S.M.; Hooshmand, R.; Gholipour, E. A comprehensive review on microgrid and virtual power plant concepts employed for distributed energy resources scheduling in power systems. Renew. Sustain. Energy Rev. 2017, 67, 341–363. [Google Scholar] [CrossRef]
- Pasetti, M.; Rinaldi, S.; Manerba, D. A virtual power plant architecture for the demand-side management of smart prosumers. Appl. Sci. 2018, 8, 432. [Google Scholar] [CrossRef] [Green Version]
- Bagchi, A.; Goel, L.; Wang, P. Generation adequacy evaluation incorporating an aggregated probabilistic model of active distribution network components and features. IEEE Trans. Smart Grid. 2018, 9, 2667–2680. [Google Scholar] [CrossRef]
- Bagchi, A.; Goel, L.; Wang, P. Adequacy assessment of generating systems incorporating storage integrated virtual power plants. IEEE Trans. Smart Grid. 2019, 10, 3440–3451. [Google Scholar] [CrossRef]
- Maanavi, M.; Najafi, A.; Godina, R.; Mahmoudian, M.; Rodrigues, E.M.G. Energy management of virtual power plant considering distributed generation sizing and pricing. Appl. Sci. 2019, 9, 2817. [Google Scholar] [CrossRef] [Green Version]
- Abbasi, M.H.; Taki, M.; Rajabi, A.; Li, L.; Zhang, J. Coordinated operation of electric vehicle charging and wind power generation as a virtual power plant: A multi-stage risk constrained approach. Appl. Energy 2019, 239, 1294–1307. [Google Scholar] [CrossRef]
- Zhao, Q.; Shen, Y.; Li, M. Control and bidding strategy for virtual power plants with renewable generation and inelastic demand in electricity markets. IEEE Trans. Sustain. Energy 2016, 7, 562–575. [Google Scholar] [CrossRef]
- Wang, Y.; Ai, X.; Tan, Z.; Yan, L.; Liu, S. Interactive dispatch modes and bidding strategy of multiple virtual power plants based on demand response and game theory. IEEE Trans. Smart Grid. 2016, 7, 510–519. [Google Scholar] [CrossRef]
- Rahimiyan, M.; Baringo, L. Strategic bidding for a virtual power plant in the day-ahead and real-time markets: A price-taker robust optimization approach. IEEE Trans. Power Syst. 2016, 31, 2676–2687. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, Z.; Xu, W.; Zhu, F.; Lyu, X.; Fu, M. Bi-objective dispatch of multi-energy virtual power plant: Deep-learning-based prediction and particle swarm optimization. Appl. Sci. 2019, 9, 292. [Google Scholar] [CrossRef] [Green Version]
- Duan, J.; Wang, X.; Gao, Y.; Yang, Y.; Yang, W.; Li, H.; Ehsan, A. Multi-objective virtual power plant construction model based on decision area division. Appl. Sci. 2018, 8, 1484. [Google Scholar] [CrossRef] [Green Version]
- Yi, Z.; Xu, Y.; Zhou, J.; Wu, W.; Sun, H. Bi-level programming for optimal operation of an active distribution network with multiple virtual power plants. IEEE Trans. Sustain. Energy 2020, 11, 2855–2869. [Google Scholar] [CrossRef]
- Naughton, J.; Wang, H.; Riaz, S.; Cantoni, M.; Mancarella, P. Optimization of multi-energy virtual power plants for providing multiple market and local network services. Electr. Power Syst. Res. 2020, 189, 106775. [Google Scholar] [CrossRef]
- Sučić, S.; Dragičević, T.; Capuder, T.; Delimar, M. Economic dispatch of virtual power plants in an event-driven service-oriented framework using standards-based communications. Electr. Power Syst. Res. 2011, 81, 2108–2119. [Google Scholar] [CrossRef]
- Etherden, N.; Vyatkin, V.; Bollen, M.H.J. Virtual power plant for grid services using IEC 61850. IEEE Trans. Ind. Inform. 2016, 12, 437–447. [Google Scholar] [CrossRef]
- Kolenc, M.; Nemček, P.; Gutschi, C.; Suljanović, N.; Zajc, M. Performance evaluation of a virtual power plant communication system providing ancillary services. Electr. Power Syst. Res. 2017, 149, 46–54. [Google Scholar] [CrossRef]
- Kolenc, M.; Ihle, N.; Gutschi, C.; Nemček, P.; Breitkreuz, T.; Gödderz, K.; Suljanović, N.; Zajc, M. Virtual power plant architecture using OpenADR 2.0b for dynamic charging of automated guided vehicles. Int. J. Electr. Power Energy Syst. 2019, 104, 370–382. [Google Scholar] [CrossRef]
- Xie, P.; Cai, Z.; Liu, P.; Li, X.; Zhang, Y.; Xu, D. Microgrid system energy storage capacity optimization considering multiple time scale uncertainty coupling. IEEE Trans. Smart Grid. 2019, 10, 5234–5245. [Google Scholar] [CrossRef]
- Schneider, K.P.; Tuffner, F.K.; Elizondo, M.A.; Liu, C.; Xu, Y.; Backhaus, S.; Ton, D. Enabling resiliency operations across multiple microgrids with grid friendly appliance controllers. IEEE Trans. Smart Grid. 2018, 9, 4755–4764. [Google Scholar] [CrossRef]
- Zhu, J.-H.; Gu, J.; Wu, M. Grid-friendly active demand strategy on air conditioning class load. Appl. Sci. 2020, 10, 6464. [Google Scholar] [CrossRef]
- Xue, Y. Space-time cooperative framework for defending blackouts part I from isolated defense lines to coordinated defending. Autom. Electr. Power Syst. 2016, 30, 8–16. [Google Scholar]
- Cao, Y.; Zhang, Y.; Zhang, H.; Zhang, P. Complementarity assessment of wind-solar energy sources in Shandong province based on NASA. J. Eng. 2019, 2019, 4996–5000. [Google Scholar] [CrossRef]
- Shi, F.; Zhang, H.; Cao, Y.; Sun, H.; Chai, Y. Enhancing event-driven load shedding by corrective switching with transient security and overload constraints. IEEE Access 2019, 7, 101355–101365. [Google Scholar] [CrossRef]
- Wang, L.; Singh, C. Multicriteria design of hybrid power generation systems based on a modified particle swarm optimization algorithm. IEEE Trans. Energy Convers. 2009, 24, 163–172. [Google Scholar] [CrossRef]
- Alsayed, M.; Cacciato, M.; Scarcella, G.; Scelba, G. Multicriteria optimal sizing of photovoltaic-wind turbine grid connected systems. IEEE Trans. Energy Convers. 2013, 28, 370–379. [Google Scholar] [CrossRef]
- Hong, Y.Y.; Lian, R.C. Optimal sizing of hybrid wind/PV/diesel generation in a stand-alone power system using Markov-based genetic algorithm. IEEE Trans. Power Del. 2012, 27, 640–647. [Google Scholar] [CrossRef]
- Wang, J.; Yang, F. Optimal capacity allocation of standalone wind/solar/battery hybrid power system based on improved particle swarm optimisation algorithm. IET Renew. Power Gener. 2013, 7, 443–448. [Google Scholar] [CrossRef]
Figure 1.
Schematic diagram of horizontal integration of the dispatch system in China.

Figure 2.
Schematic diagram of vertical connection of the dispatch system in China.

Figure 3.
Schematic diagram of three defense-lines.

Figure 4.
Frequency dynamic response with different equivalent inertia H.

Figure 5.
Frequency stability control process under large power deficits.

Figure 6.
Schematic diagram of the proposed grid-friendly virtual power plant (GVPP).

Figure 7.
Multi-agent architecture of a GVPP.

Figure 8.
Schematic diagram of the cloud platform of the China state grid.

Figure 9.
Bi-level dispatch and control architecture of GVPPs based on the cloud platform.

Figure 10.
Flowchart of the operation of the bi-level dispatch and control architecture.

Figure 11.
Suggestions for further research on the GVPP.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Xu, Q.; Cao, Y.; Zhang, H.; Zhang, W.; Terzija, V. Bi-Level Dispatch and Control Architecture for Power System in China Based on Grid-Friendly Virtual Power Plant. Appl. Sci. 2021, 11, 1282. https://doi.org/10.3390/app11031282
AMA Style
Xu Q, Cao Y, Zhang H, Zhang W, Terzija V. Bi-Level Dispatch and Control Architecture for Power System in China Based on Grid-Friendly Virtual Power Plant. Applied Sciences. 2021; 11(3):1282. https://doi.org/10.3390/app11031282
Chicago/Turabian StyleXu, Qingwen, Yongji Cao, Hengxu Zhang, Wen Zhang, and Vladimir Terzija. 2021. "Bi-Level Dispatch and Control Architecture for Power System in China Based on Grid-Friendly Virtual Power Plant" Applied Sciences 11, no. 3: 1282. https://doi.org/10.3390/app11031282
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.