
A Method for Aero-Engine Gas Path Anomaly Detection Based on Markov Transition Field and Multi-LSTM

 , ,
, , 
Abstract
:1. Introduction
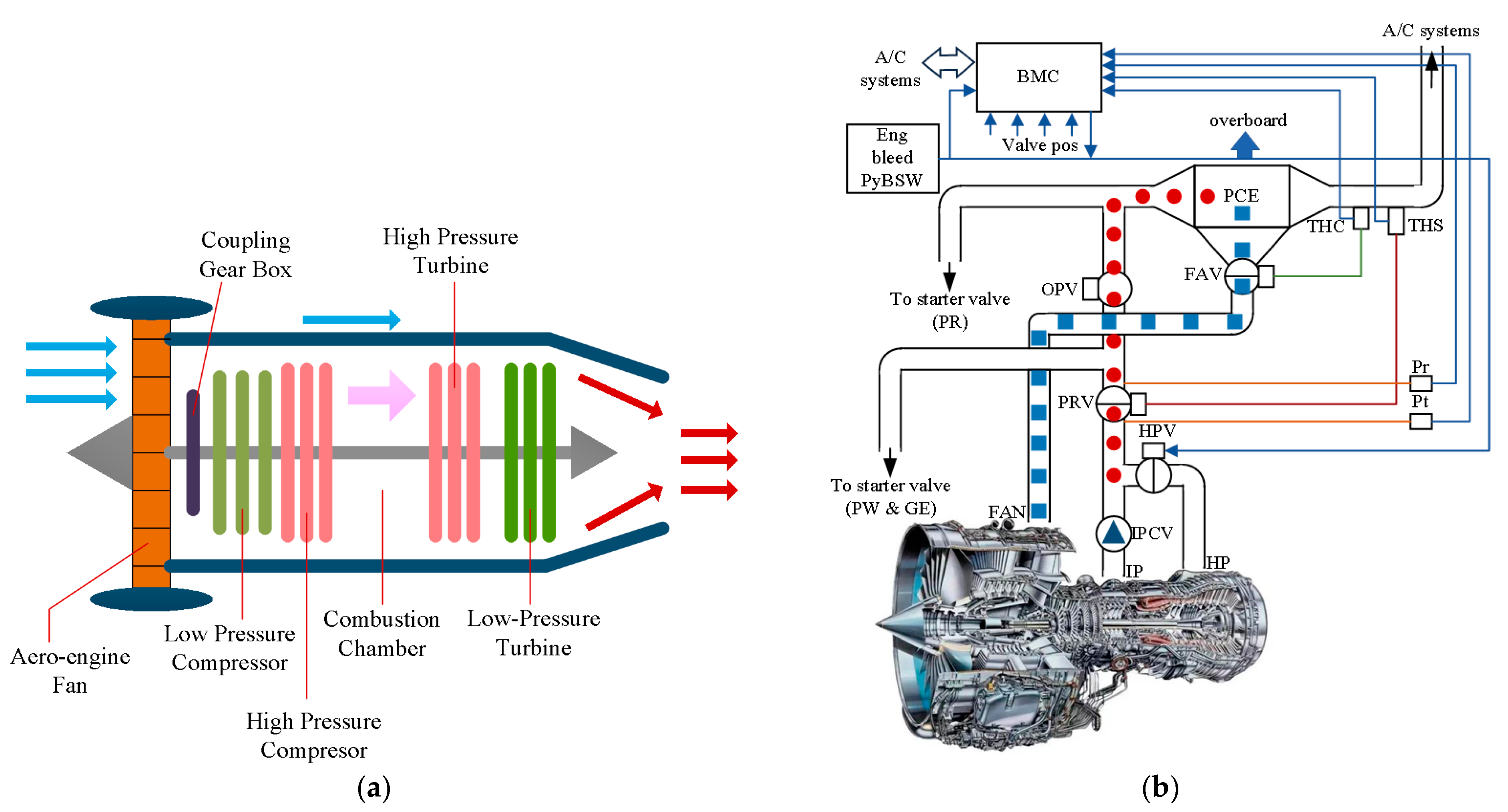
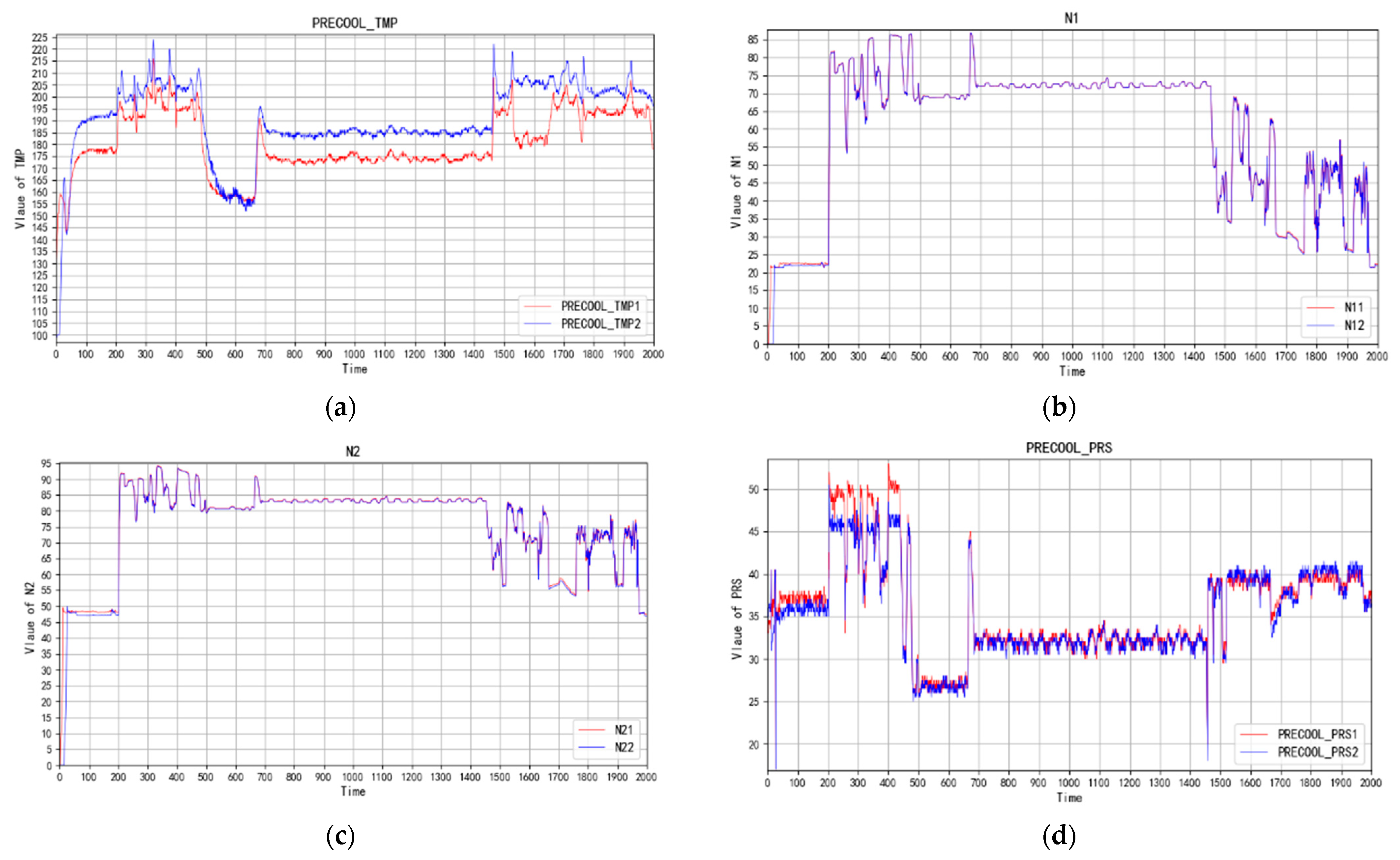
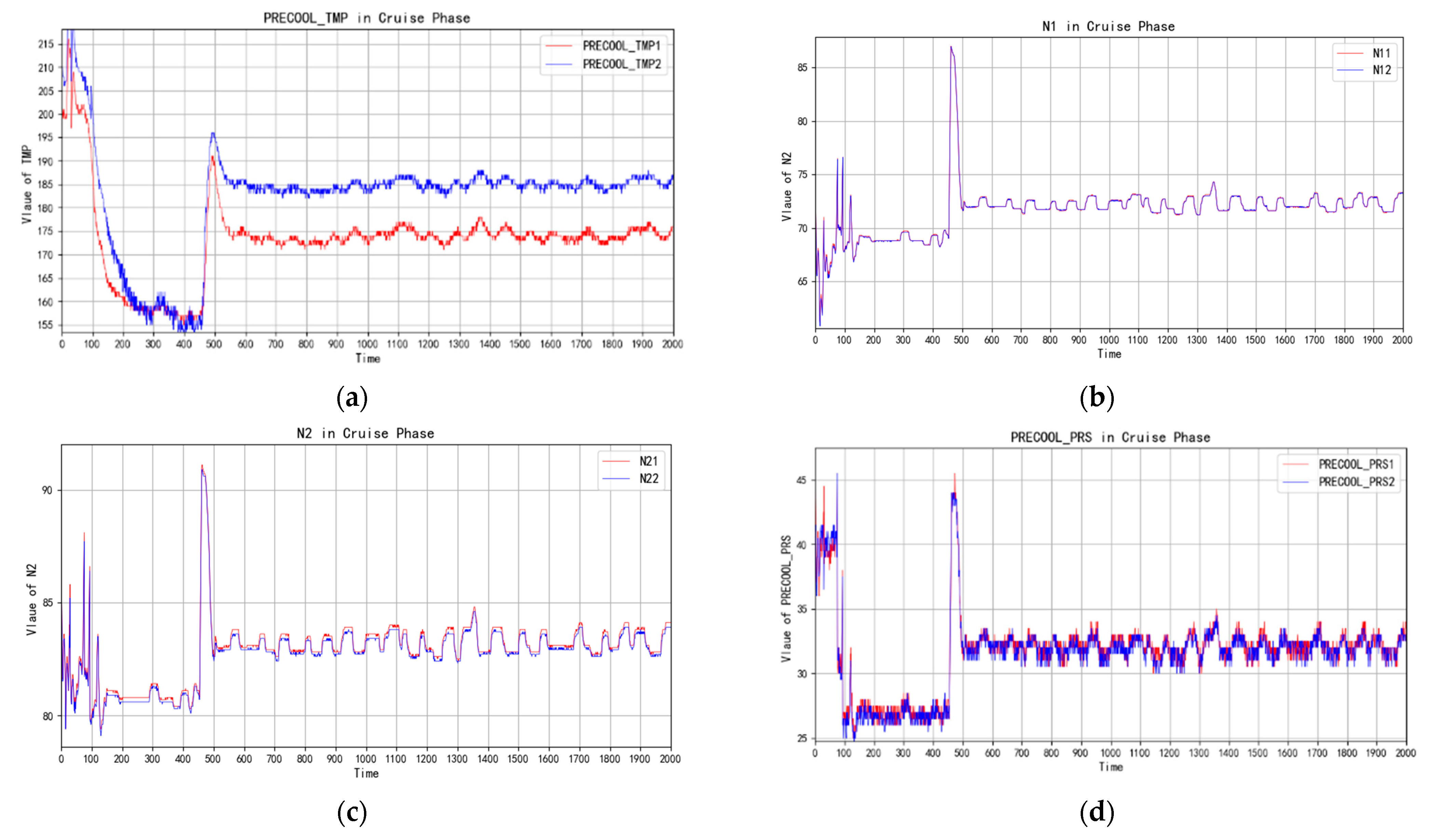
2. Introduction of Aero-Engine Gas Path and Monitoring Data
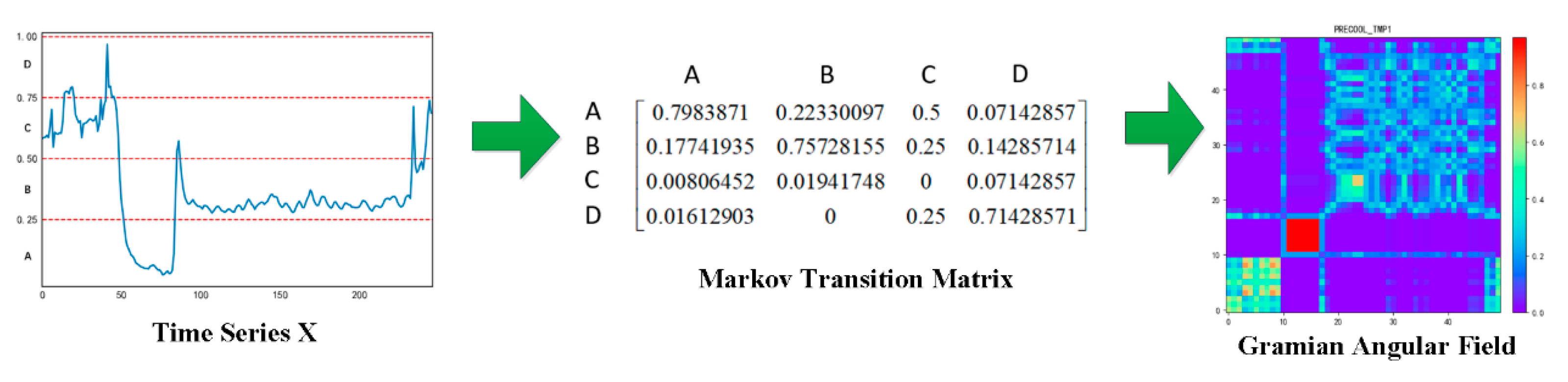
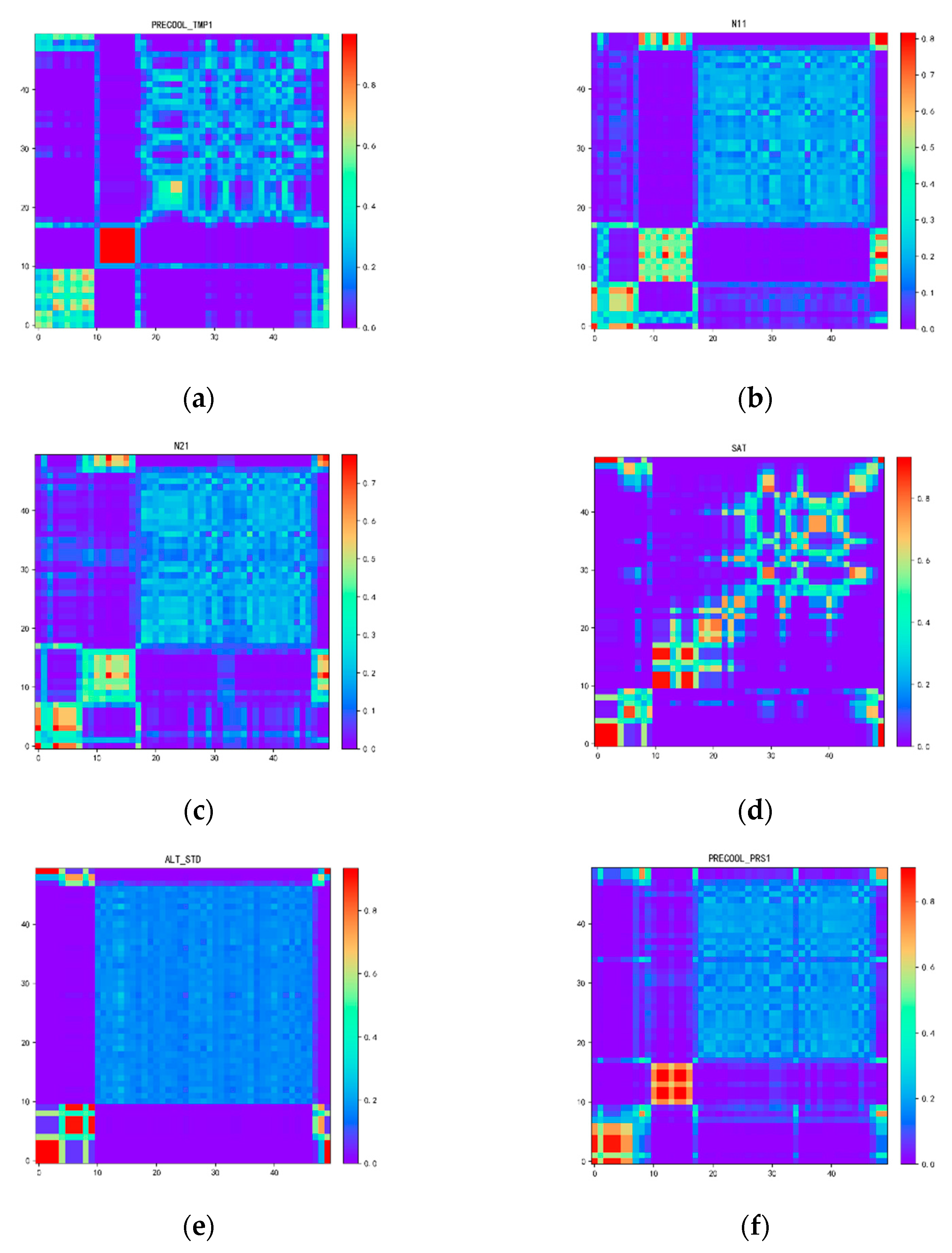
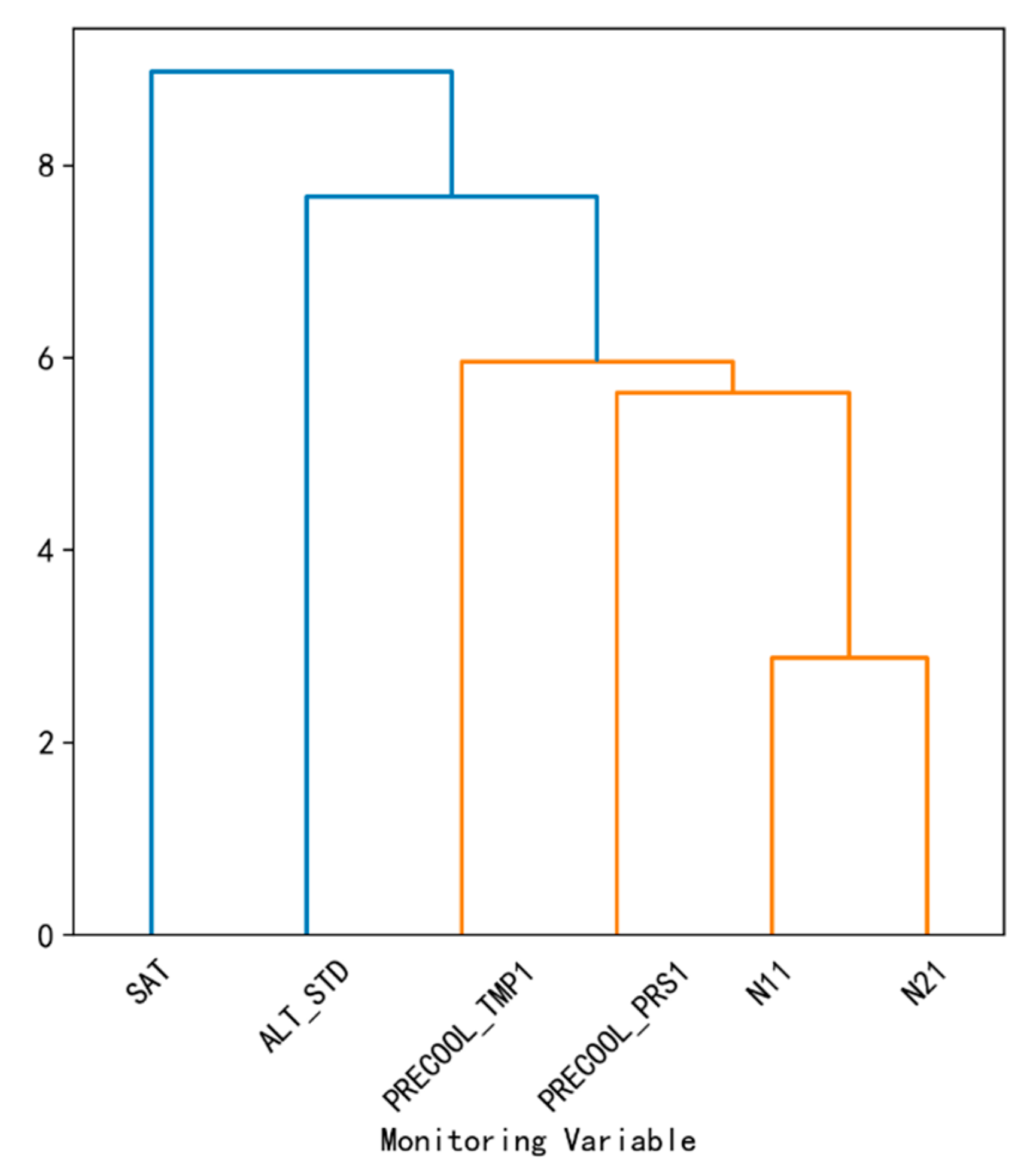
3. Correlation Analysis of Gas Path Monitoring Data Based on Markov Transition Field and Hierarchical Clustering
| Algorithm 1. Cohesive Hierarchical Clustering Algorithm |
| Input: candidate sample set, maximum distance threshold ε. Output: feature clustering result set C. For Si ∈ D // Use each sample in D as an initial cluster. Ci ← empty set; Ci ← Ci∪Si; C ← C∪Ci; End for While Maximum sample distance less than e after merging two classes. Calculate the distance between the two classes, merge the smallest distance classes, and select one of them to merge if there are many pairs of smallest distance classes with the same distance. End while |
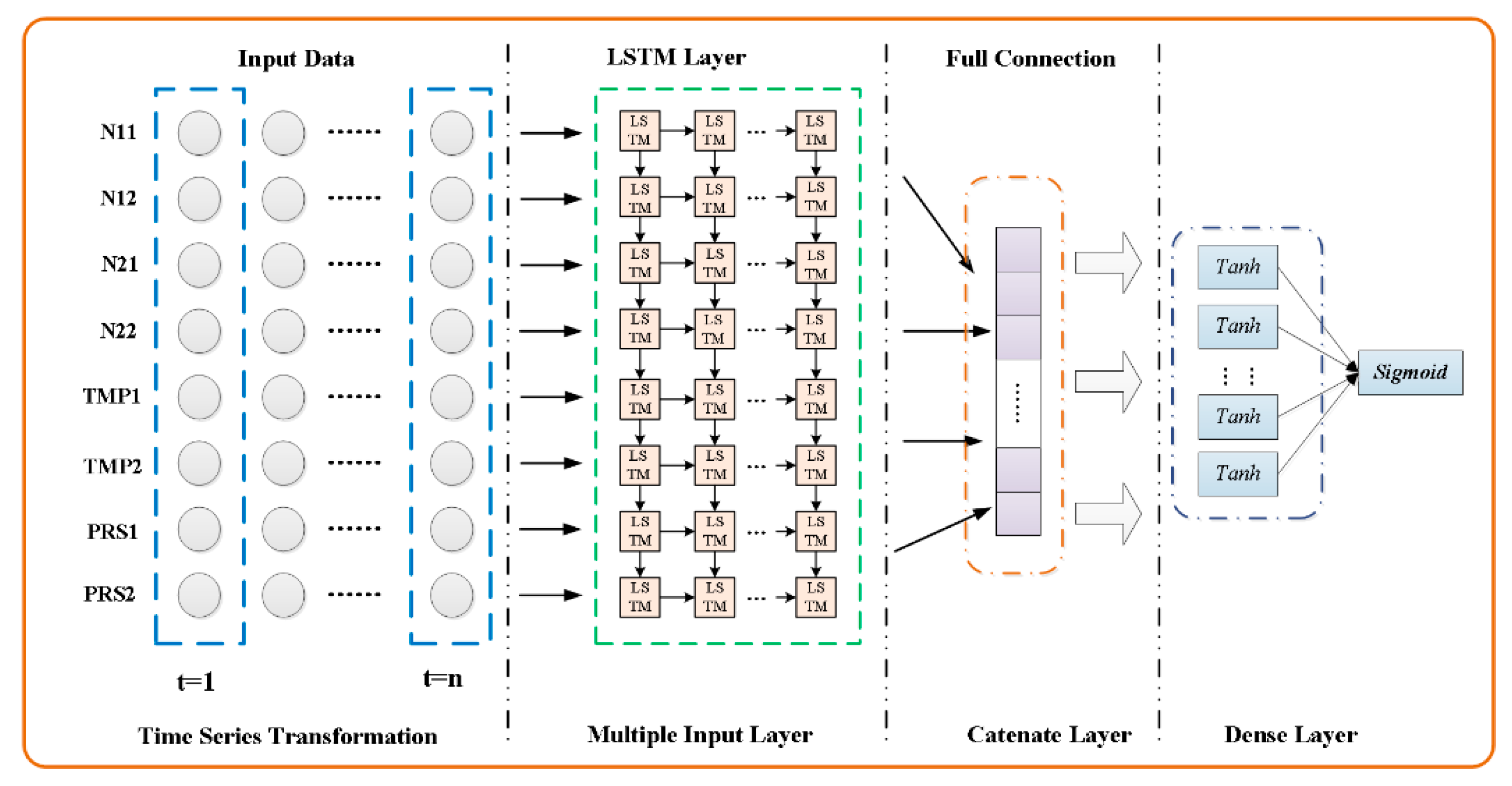
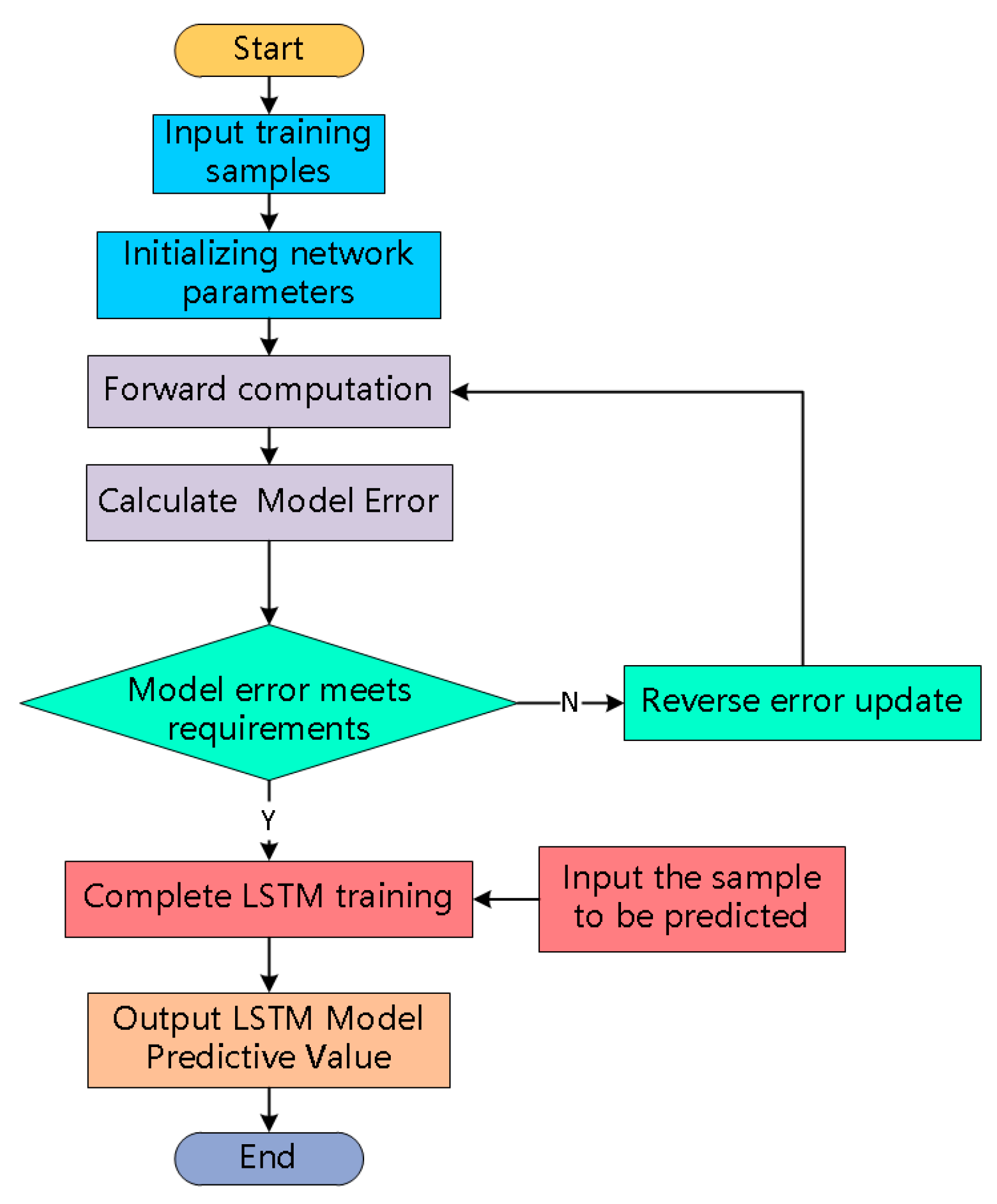
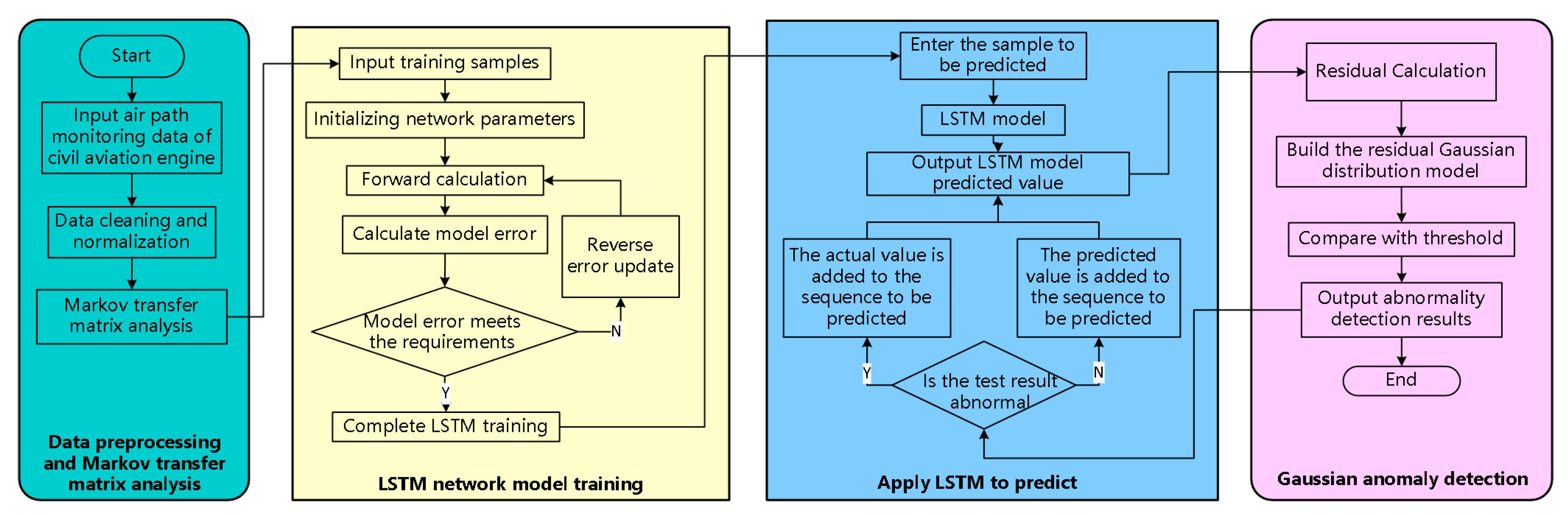
4. Construction of Anomaly Detection Model Based on Multi-LSTM and Gaussian Anomaly Detection Model
4.1. Prediction Based on Multi-LSTM
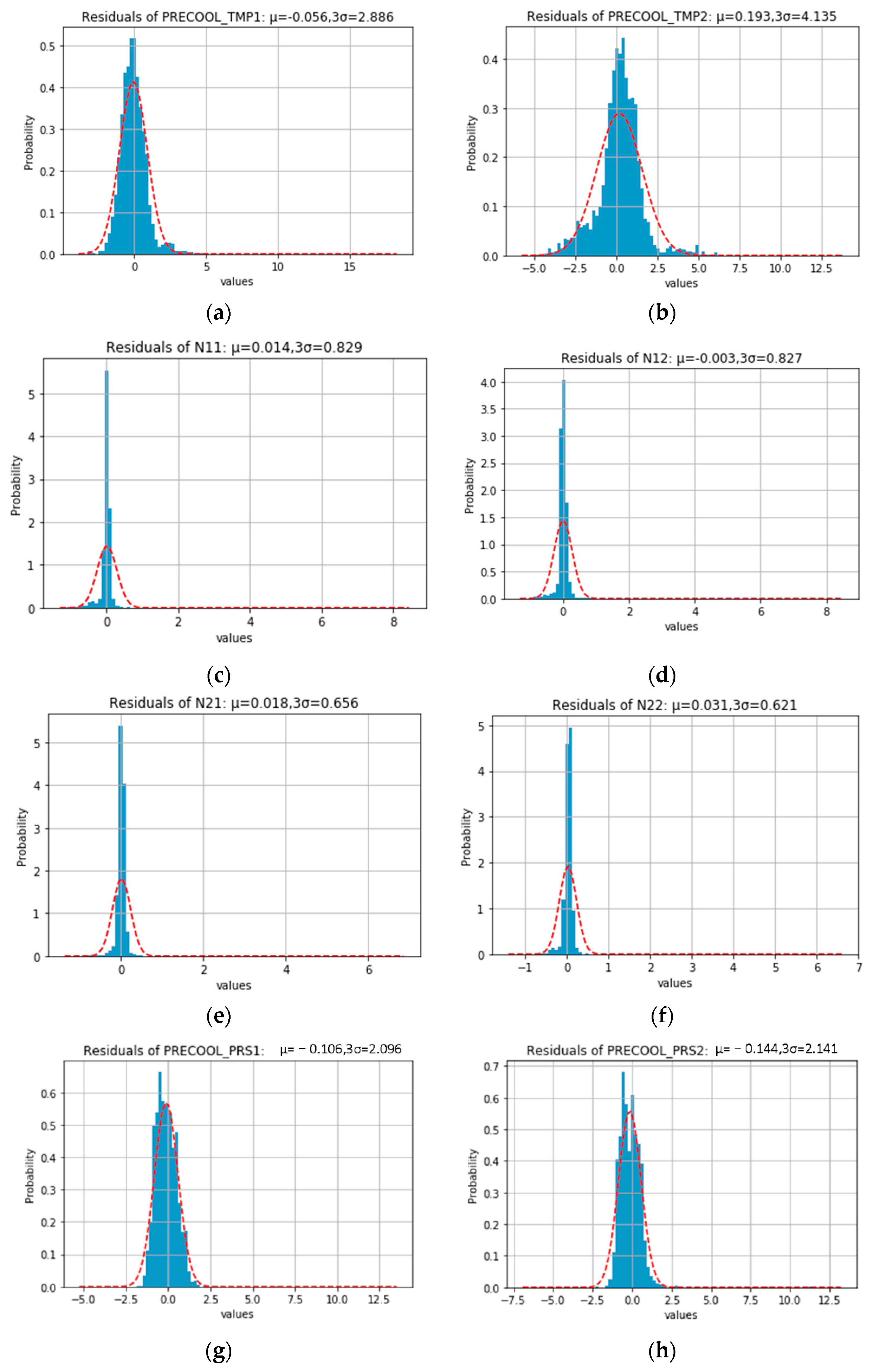
4.2. Gaussian Distribution Model Based on Prediction Error
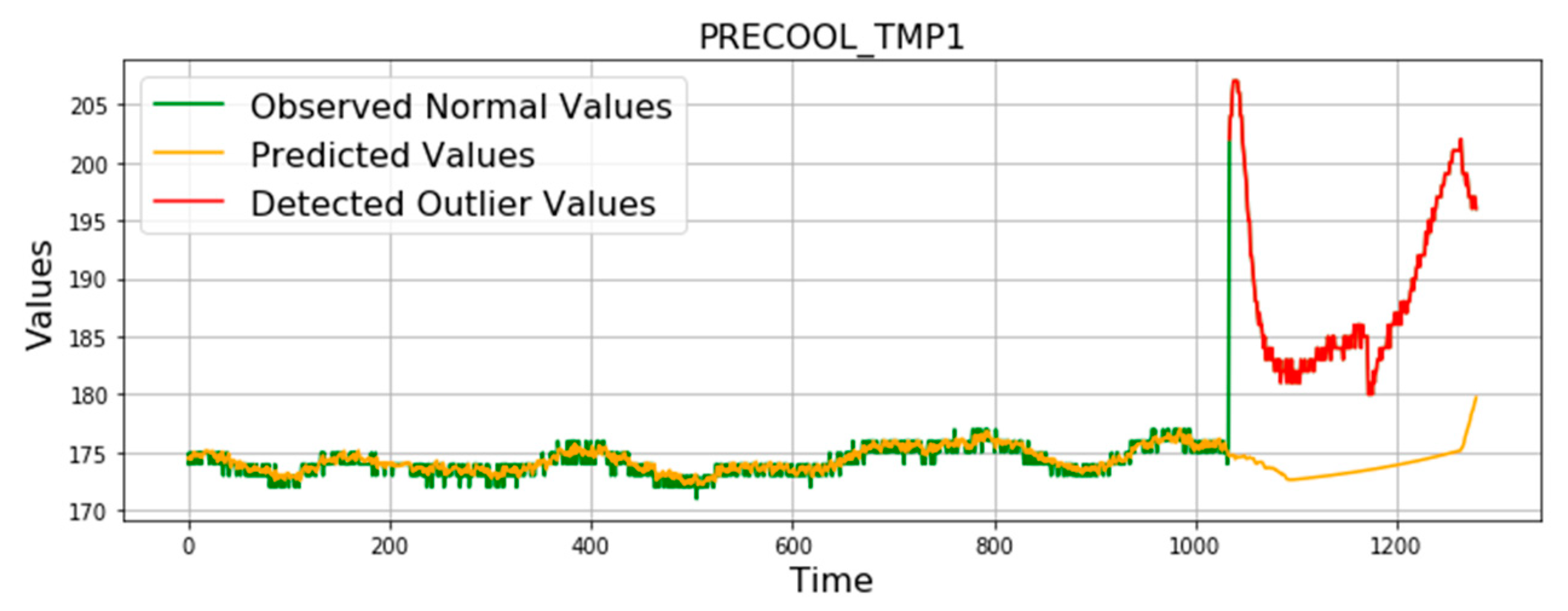
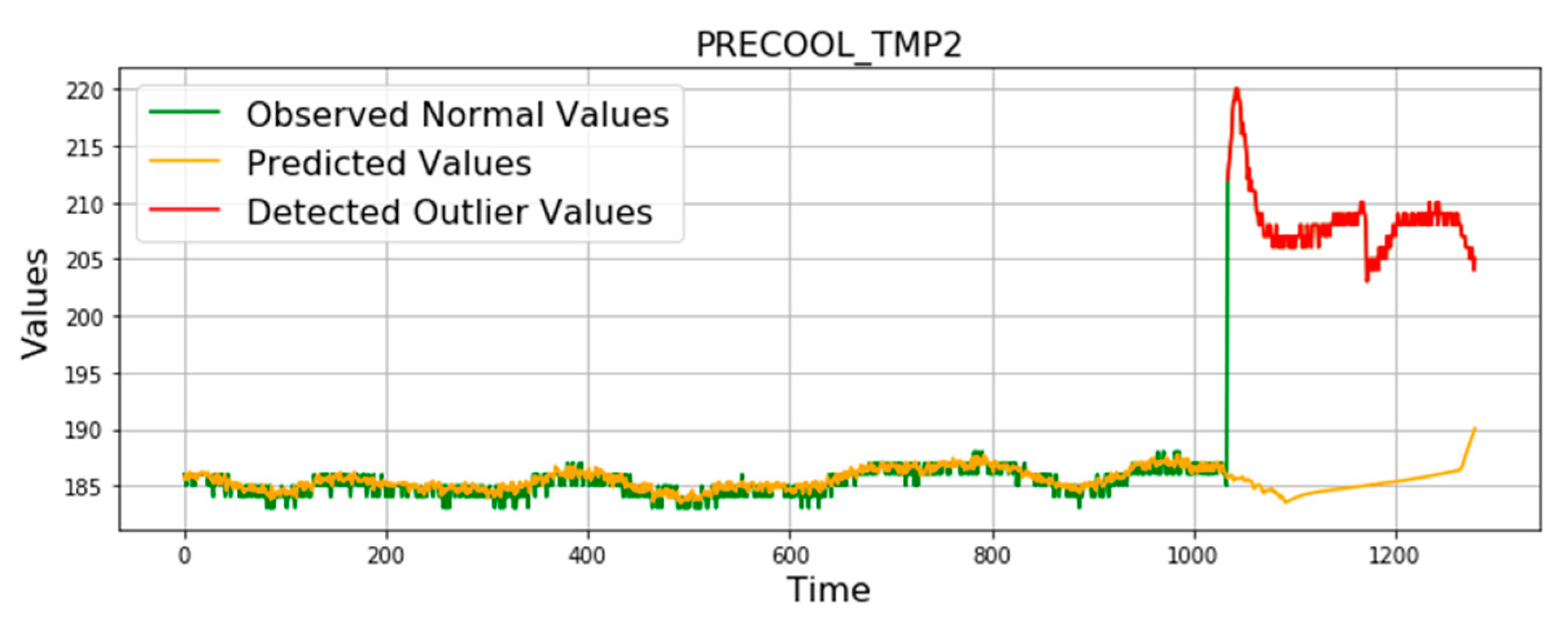
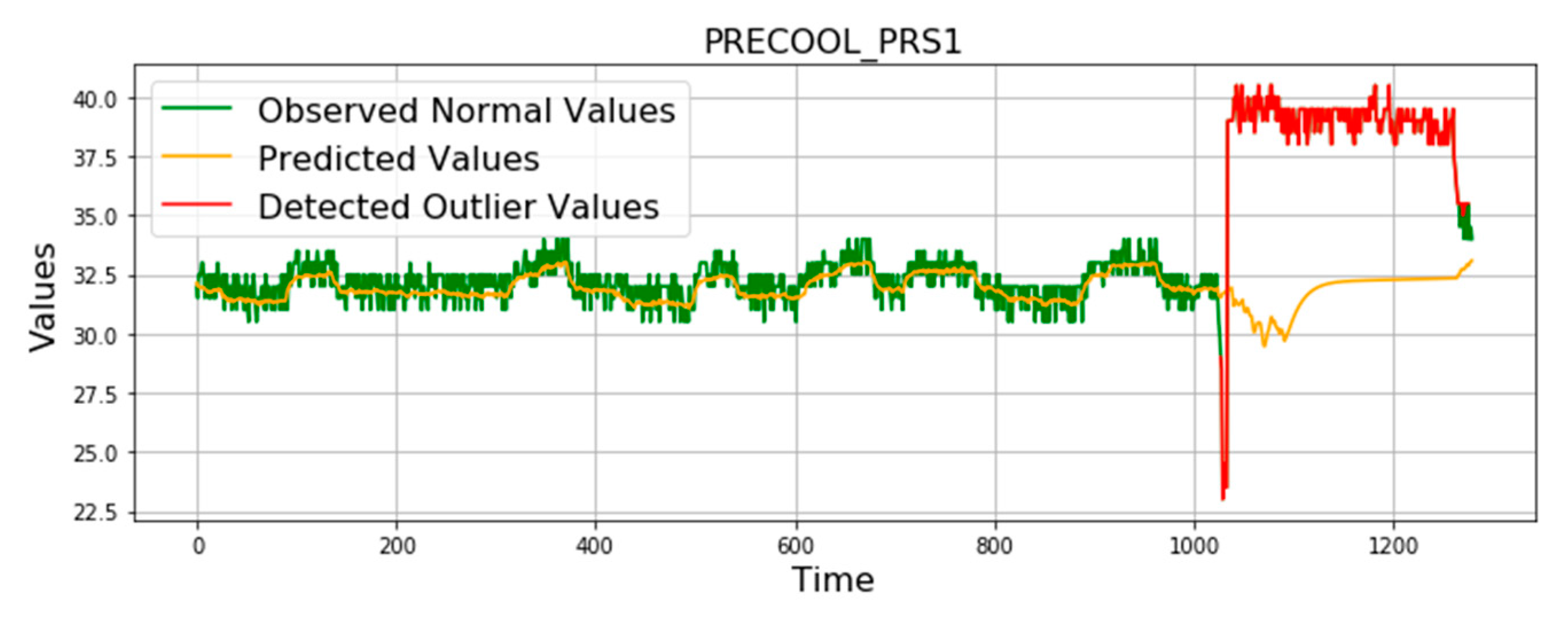
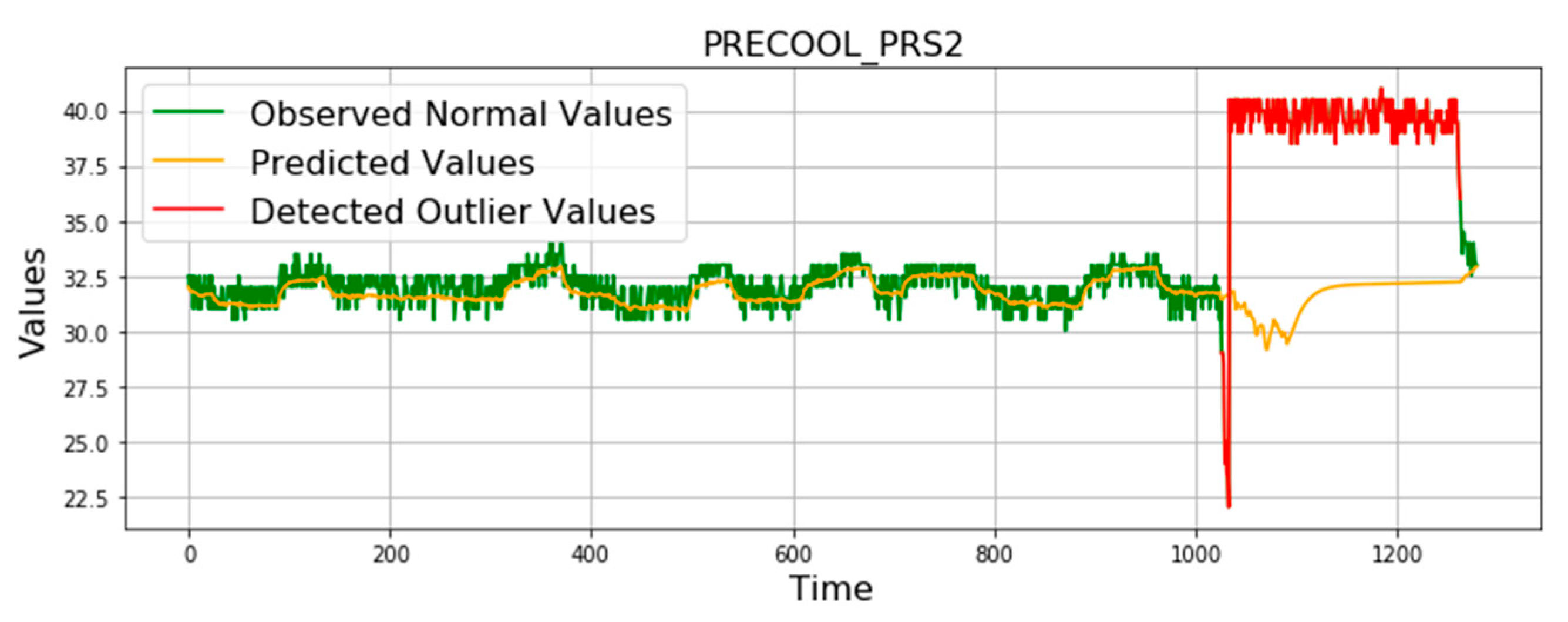
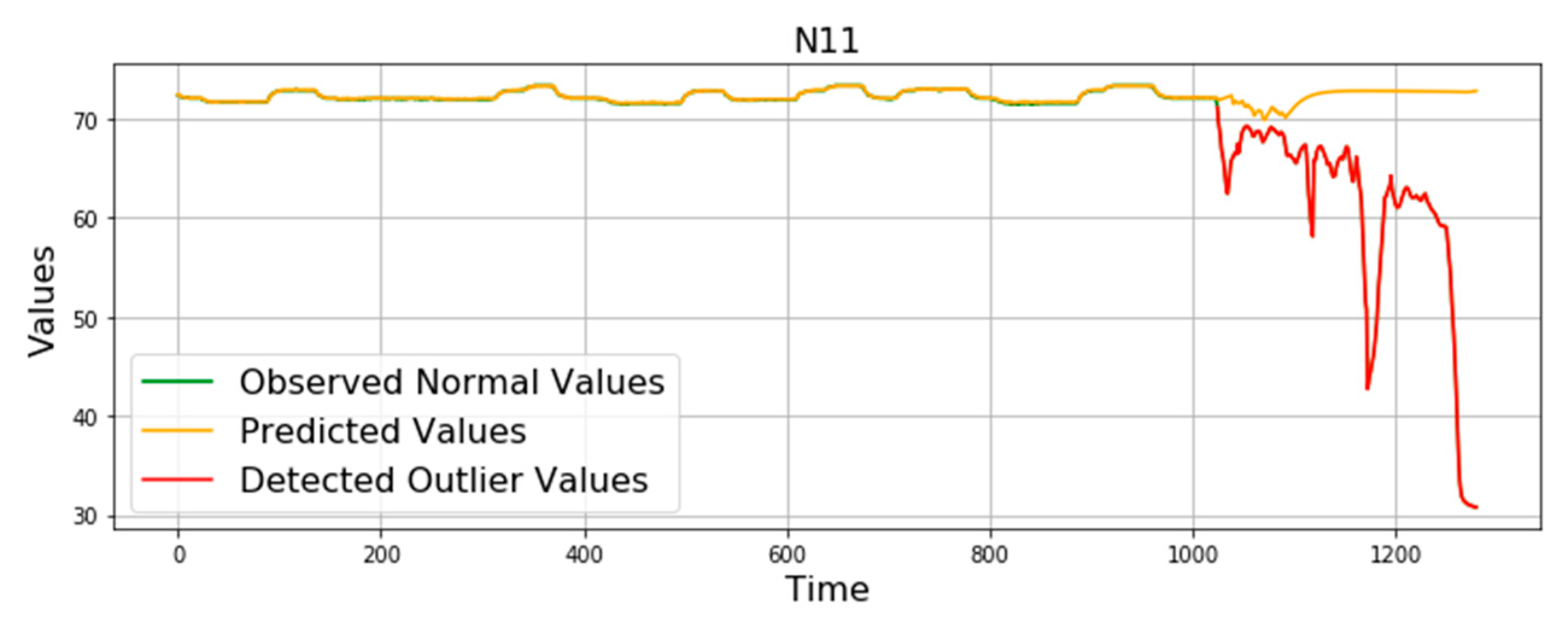
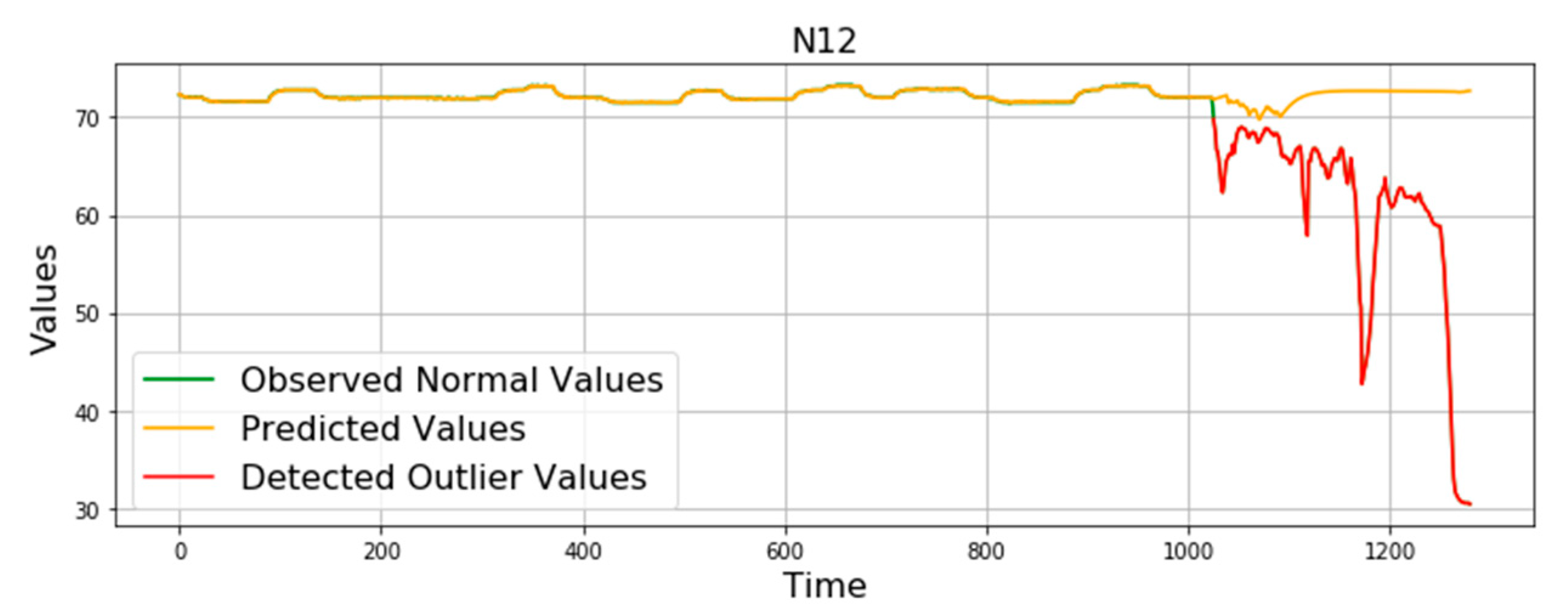
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.-Y.; Li, C.-F.; Gao, M.-Y.; Li, Z.-S. Fault diagnosis of aero-engine gas path based on SVM and SNN. J. Aerosp. Power 2014, 10, 2493–2498. [Google Scholar]
- Zhang, Y.-Z.; Zhong, S.-S.; Fu, X.-Y.; Lin, L. Aeroengine gas path parameter prediction based on dynamic ensemble algorithm. J. Aerosp. Power 2018, 9, 2285–2295. [Google Scholar]
- Cao, H.-L.; Gao, Y. Research on QAR Data Knowledge and Application in Civil Aviation Field. Mech. Eng. Autom. 2018, 1, 24–26. [Google Scholar]
- Sun, H.; Fu, X.-Y.; Zhong, S.-S. A Weakly Supervised Gas-Path Anomaly Detection Method for Civil Aero-Engines Based on Mapping Relationship Mining of Gas-Path Parameters and Improved Density Peak Clustering. Sensors 2021, 21, 4526. [Google Scholar] [CrossRef]
- Chen, J.-S.; Xu, X.-K.; Zhang, X.-Y. Fault Detection for Turbine Engine Disk Based on Adaptive Weighted One-Class Support Vector Machine. J. Electr. Comput. Eng. 2020, 10, 1–10. [Google Scholar] [CrossRef]
- Pérez-Ruiz, J.L.; Tang, Y.; Loboda, I. Aircraft Engine Gas-Path Monitoring and Diagnostics Framework Based on a Hybrid Fault Recognition Approach. Aerospace 2021, 8, 232. [Google Scholar] [CrossRef]
- Zaccaria, V.; Fentaye, A.D.; Stenfelt, M.; Kyprianidis, K.G. Probabilistic Model for Aero-Engines Fleet Condition Monitoring. Aerospace 2020, 7, 66. [Google Scholar] [CrossRef]
- Gharoun, H.; Keramati, A.; Nasiri, M.M.; Azadeh, A. An integrated approach for aircraft turbofan engine fault detection based on data mining techniques. Expert Syst. 2019, 36, 1. [Google Scholar] [CrossRef]
- Xie, J.-W.; Liu, J.-Q.; Wang, X.-L. Aero-engines Health Monitoring Method Based on Mahalanobis Distance. Aeronaut. Comput. Tech. 2015, 3, 72–75. [Google Scholar]
- Wen, Y.; Yan, Y. Aero Engine Anomaly Monitoring Based on Self-adaptive Kernel Principal Component Analysis. Ordnance Ind. Autom. 2016, 35, 1–8. [Google Scholar]
- Trent 700-Rolls-Royce. Available online: https://www.rolls-royce.com/products-and-services/civil-aerospace/airlines/trent-700.aspx (accessed on 16 November 2021).
- Calderano, P.H.S.; Ribeiro, M.G.C.; de Aguiar, E.P.; Amaral, R.P.F.; Vellasco, M.M.B.R.; Tanscheit, R. An enhanced aircraft engine gas path diagnostic method based on upper and lower singleton type-2 fuzzy logic system. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 2. [Google Scholar] [CrossRef]
- Wang, Z.; Oates, T. Encoding Time Series as Images for Visual Inspection and Classification Using Tiled Convolutional Neural Networks. In Proceedings of the Workshops at the Twenty-ninth Aaai Conference on Artificial Intelligence, Austin, TX, USA, 25–26 January 2015. [Google Scholar]
- Jiang, J.-R.; Yen, C.-T. Product Quality Prediction for Wire Electrical Discharge Machining with Markov Transition Fields and Convolutional Long Short-Term Memory Neural Networks. Appl. Sci. 2021, 11, 5922. [Google Scholar] [CrossRef]
- Bugueno, M.; Molina, G.; Mena, F.; Olivares, P.; Araya, M. Harnessing the power of CNNs for unevenly-sampled light-curves using Markov Transition Field. Astron. Comput. 2021, 35, 100461. [Google Scholar] [CrossRef]
- Hulot, A.; Laloë, D.; Jaffrézic, F. A unified framework for the integration of multiple hierarchical clusterings or networks from multi-source data. BMC Bioinform. 2021, 22, 1–20. [Google Scholar] [CrossRef]
- Alter, B.-J.; Anderson, N.-P.; Gillman, A.-G.; Yin, Q.; Jeong, J.-H.; Wasan, A.-D. Hierarchical clustering by patient-reported pain distribution alone identifies distinct chronic pain subgroups differing by pain intensity, quality, and clinical outcomes. PLoS ONE 2021, 16, e0254862. [Google Scholar] [CrossRef]
- Zhou, X.; Hu, Y.; Liang, W.; Ma, J.; Jin, Q. Variational LSTM Enhanced Anomaly Detection for Industrial Big Data. IEEE Trans. Ind. Inform. 2021, 17, 3469–3477. [Google Scholar] [CrossRef]
- Ergen, T.; Kozat, S.-S. Unsupervised Anomaly Detection with LSTM Neural Networks. IEEE Trans. Neural Netw. Syst. 2020, 31, 3127–3141. [Google Scholar] [CrossRef] [Green Version]
- Maleki, S.; Maleki, S.; Jennings, N.-R. Unsupervised anomaly detection with LSTM autoencoders using statistical data-filtering. Appl. Soft Comput. J. 2021, 108, 107443. [Google Scholar] [CrossRef]
- Rippel, O.; Mertens, P.; Konig, E.; Merhof, D. Gaussian Anomaly Detection by Modeling the Distribution of Normal Data in Pretrained Deep Features. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Liang, J.-M.; Shen, S.-Q.; Li, M.; Li, L. Quantum Anomaly Detection with Density Estimation and Multivariate Gaussian Distribution. Phys. Rev. A 2019, 99, 052310. [Google Scholar] [CrossRef] [Green Version]
- Pandit, R.-K.; Infield, D. SCADA—based wind turbine anomaly detection using Gaussian process models for wind turbine condition monitoring purposes. IET Renew. Power Gener. 2018, 12, 1249–1255. [Google Scholar] [CrossRef] [Green Version]
- Spevakova, R.G.; Sharifullina, G.R.; Fadeyeva, E.P. Application of the «Three sigma» rule in the risk assessment of investment project. Eur. Res. 2011, 9, 932–933. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | TMP1 | TMP2 | N11 | N12 | N21 | N22 | ALT_STD | PRS1 | PRS2 |
|---|---|---|---|---|---|---|---|---|---|
| (deg C) | (deg C) | (%) | (%) | (%) | (%) | (feet) | (psi) | (psi) | |
| 10:43:51 | 134 | 107 | 0 | 0 | 0 | 0 | −448 | 37.5 | 37.5 |
| 10:43:52 | 135 | 107 | 0 | 0 | 0 | 0 | −448 | 37.5 | 37 |
| 10:43:53 | 134 | 107 | 0 | 0 | 0 | 0 | −448 | 37 | 37 |
| 10:43:54 | 135 | 106 | 0 | 0 | 0 | 0 | −448 | 35.5 | 36.5 |
| 10:43:55 | 135 | 106 | 0 | 0 | 0 | 0 | −448 | 34.5 | 37.5 |
| 10:43:56 | 135 | 107 | 0 | 0 | 0 | 0 | −448 | 35.5 | 37.5 |
| 10:43:57 | 137 | 106 | 0 | 0 | 0 | 0 | −448 | 36 | 37.5 |
| Processor | Memory | GPU | Operating System | Tensorflow |
|---|---|---|---|---|
| Intel Core i7-10875H | 16 GB | GeForce GTX2070 | Windows 10 | Tensorflow 2.5.0 |
| Model Parameter | Actual Value |
|---|---|
| Input layer parameters | 50 × 8 |
| Hidden layer | 1 |
| Neuronal number | 100 |
| Prediction step | 1 |
| Output layers | 8 |
| Monitoring Data | RMSE |
|---|---|
| TMP1 | 0.619 |
| TMP2 | 0.742 |
| PRS1 | 0.581 |
| PRS2 | 0.586 |
| N11 | 0.078 |
| N12 | 0.068 |
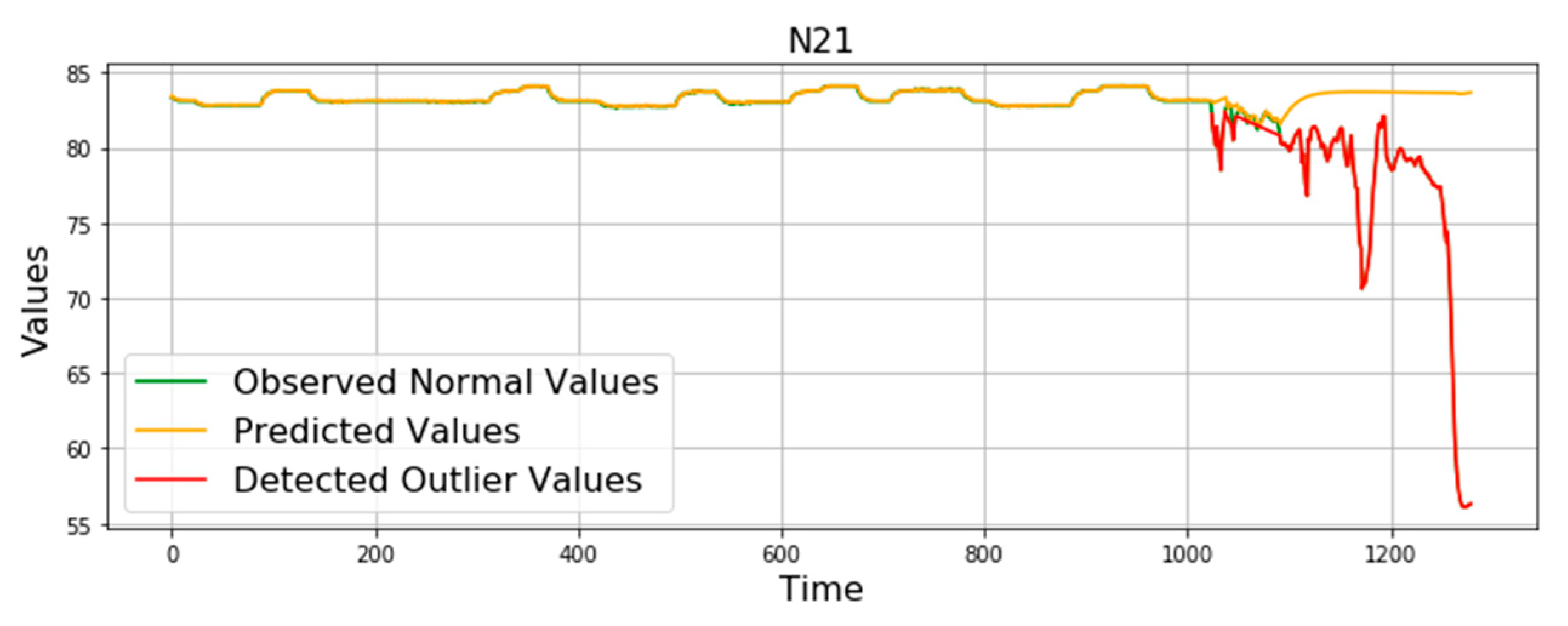
| N21 | 0.065 |
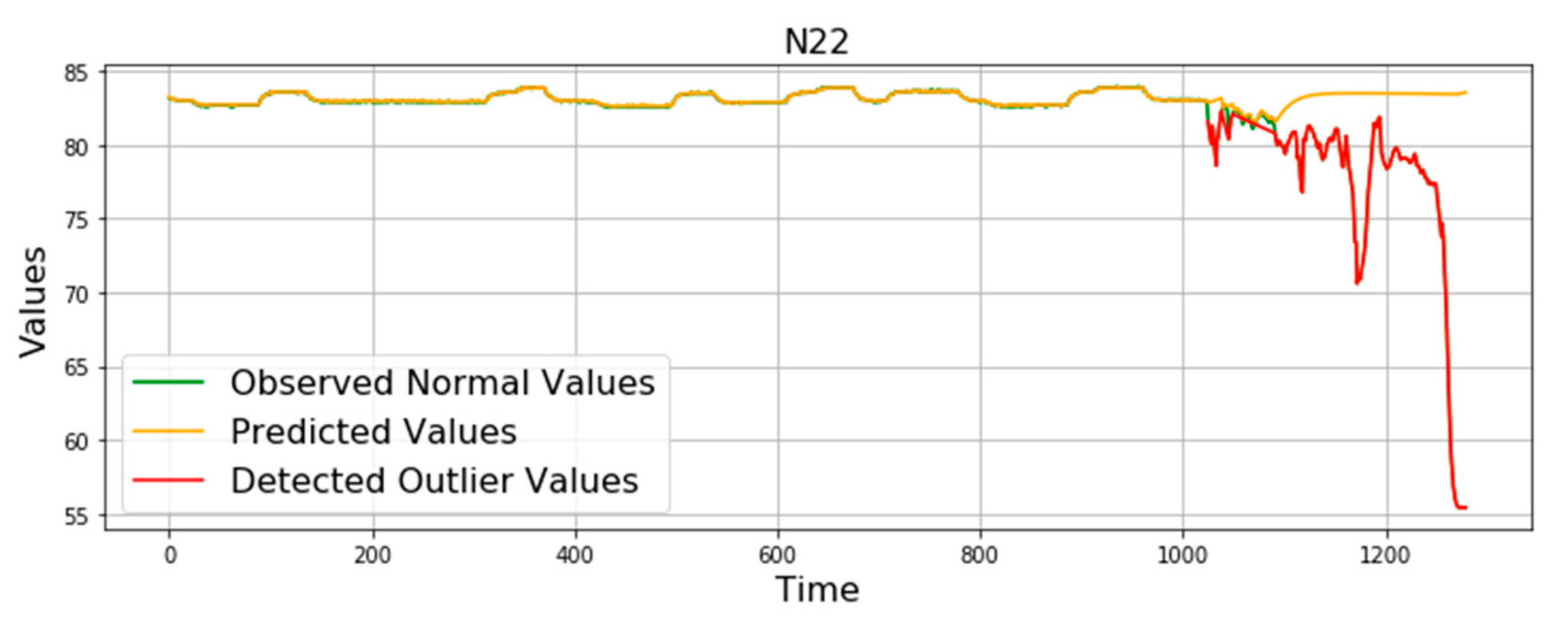
| N22 | 0.070 |
| Monitoring Data | Detection Accuracy (%) |
|---|---|
| TMP1 | 100 |
| TMP2 | 98.79 |
| PRS1 | 99.45 |
| PRS2 | 100 |
| N11 | 98.65 |
| N12 | 99.86 |
| N21 | 100 |
| N22 | 98.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, L.; Zhang, C.; Zhang, Q.; Wang, J.; Wang, Y.; Shi, Y.; Lin, C.; Jin, Y. A Method for Aero-Engine Gas Path Anomaly Detection Based on Markov Transition Field and Multi-LSTM. Aerospace 2021, 8, 374. https://doi.org/10.3390/aerospace8120374
Cui L, Zhang C, Zhang Q, Wang J, Wang Y, Shi Y, Lin C, Jin Y. A Method for Aero-Engine Gas Path Anomaly Detection Based on Markov Transition Field and Multi-LSTM. Aerospace. 2021; 8(12):374. https://doi.org/10.3390/aerospace8120374
Chicago/Turabian StyleCui, Langfu, Chaoqi Zhang, Qingzhen Zhang, Junle Wang, Yixuan Wang, Yan Shi, Cong Lin, and Yang Jin. 2021. "A Method for Aero-Engine Gas Path Anomaly Detection Based on Markov Transition Field and Multi-LSTM" Aerospace 8, no. 12: 374. https://doi.org/10.3390/aerospace8120374