Comparative Study of AI-Based Methods—Application of Analyzing Inflow and Infiltration in Sanitary Sewer Subcatchments

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Collection and Processing
2.3. Water Consumption in Study Areas
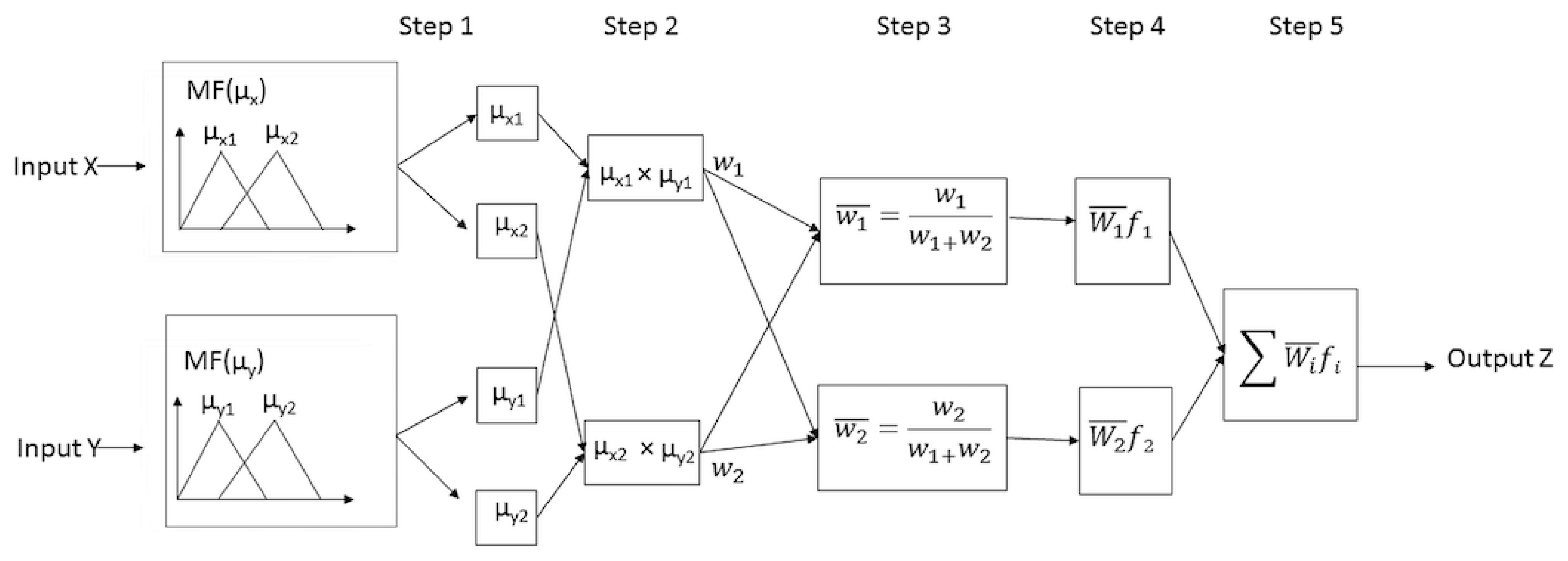
2.4. Adaptive Neurofuzzy Inference System (ANFIS)
then f1 = a1 µx1+b1 µy1+r1
then f2 = a2 µx2+b2 µy2+r2.
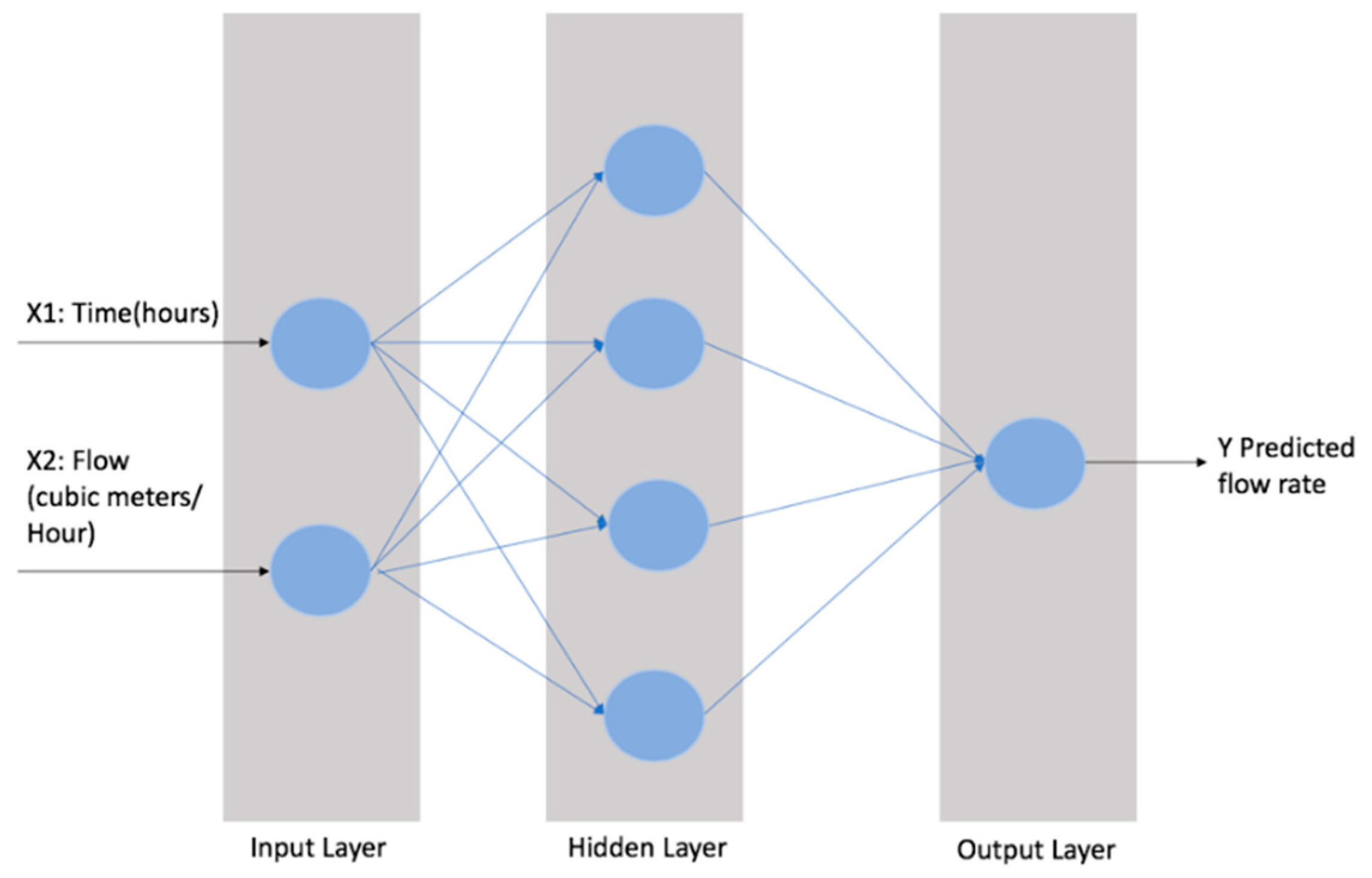
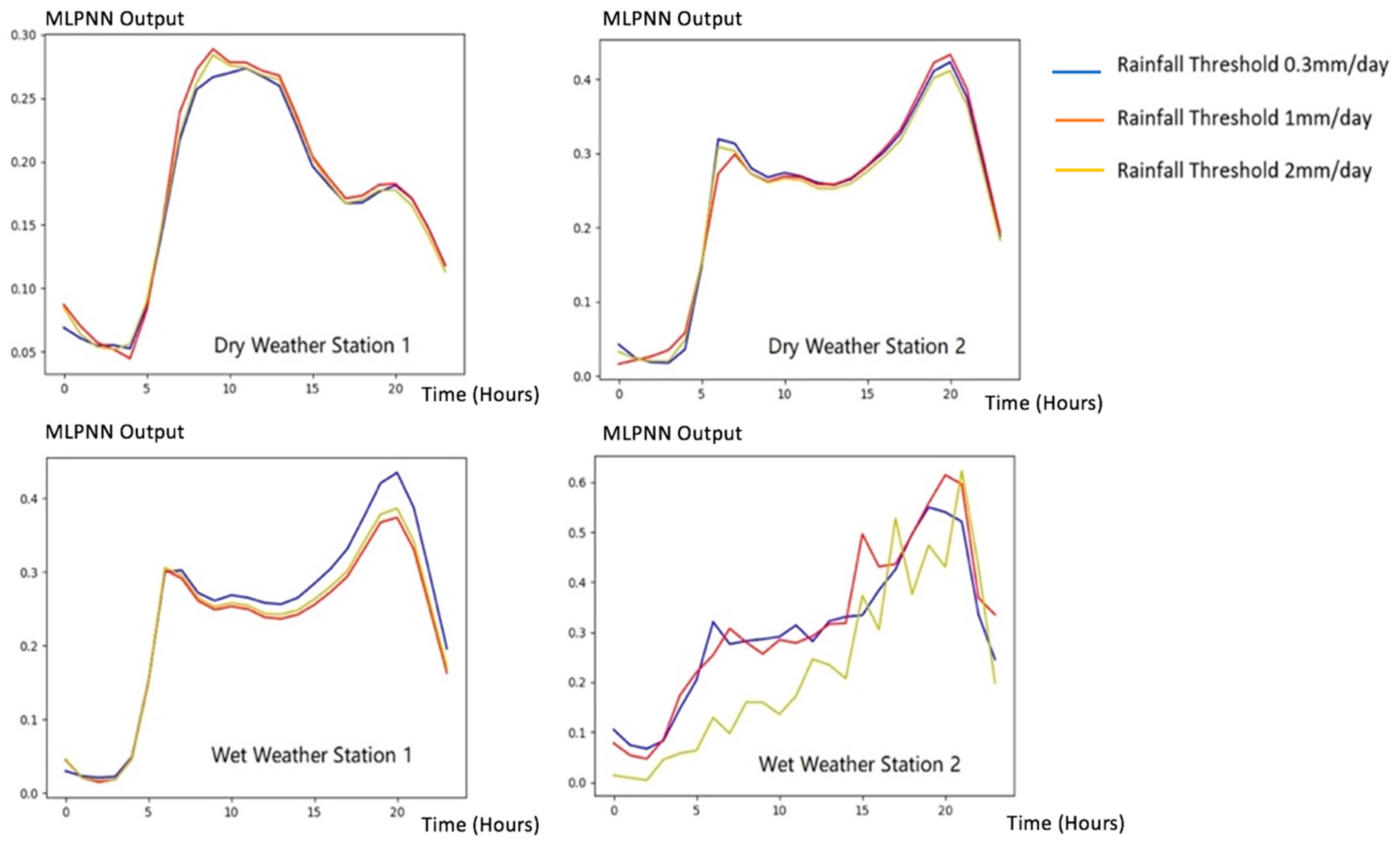
2.5. Multilayer Perceptron Neural Network
2.6. Model Evaluation
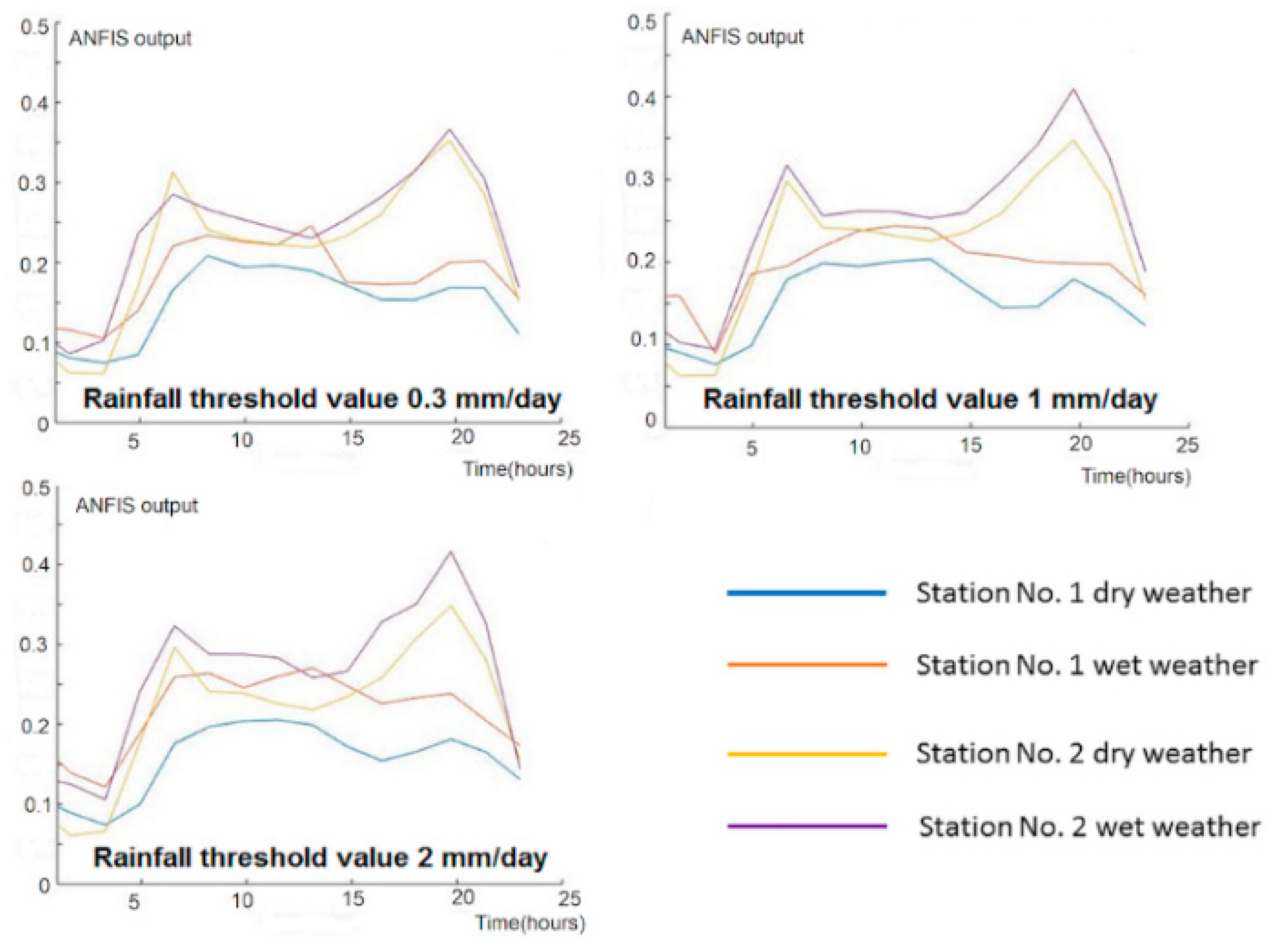
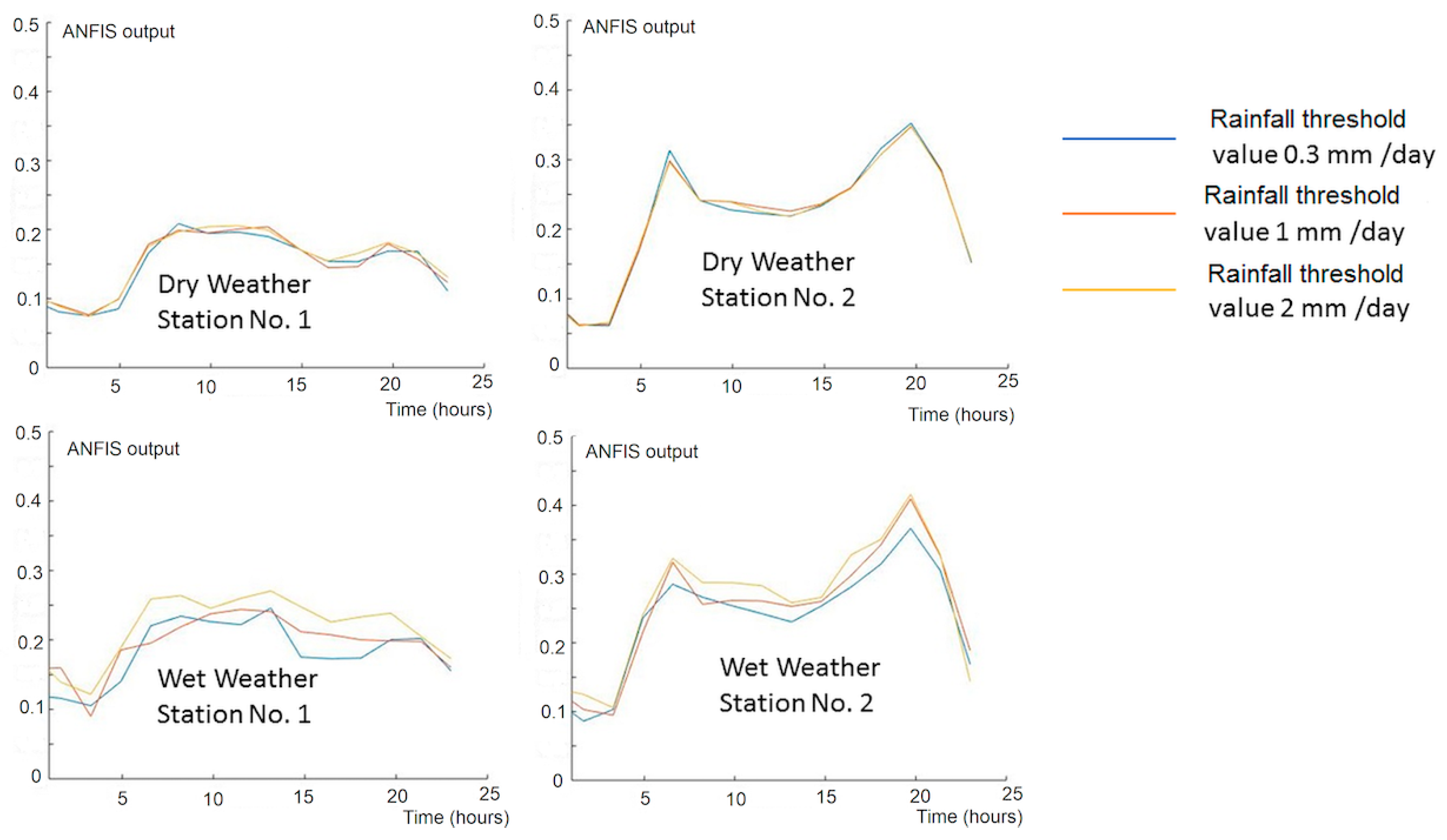
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tan, P.; Zhou, Y.; Zhang, Y.; Zhu, D.Z.; Zhang, T. Assessment and pathway determination for rainfall-derived inflow and infiltration in sanitary systems: A case study. Urban Water J. 2019, 16, 1–8. [Google Scholar] [CrossRef]
- Zhang, Z. Flow data, Inflow/Infiltration Ratio, and Autoregressive Error Models. J. Environ. Eng. 2005, 131, 343–349. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Liu, Y.; Cheng, X.; Zhu, D.Z.; Shi, H.; Yuan, Z. Quantifying rainfall-derived inflow and infiltration in sanitary sewer systems based on conductivity monitoring. J. Hydrol. 2018, 558, 174–183. [Google Scholar] [CrossRef] [Green Version]
- Yap, H.T.; Ngien, S.K.; Othman, N.; Ghani, A.A.; Abd, N. Preliminary inflow and infiltration study of sewerage systems from two residential areas in Kuantan, Pahang. ESTEEM Acad. J. 2017, 13, 98–106. [Google Scholar]
- Wang, X.; Yao, Y.; Zhou, W.; You, L.; Zeng, S. Quantification of Inflow and Infiltration in Urban Sewer Systems Based on Triangle Method. Water Pollut. Treat. 2019, 7, 152–159. [Google Scholar] [CrossRef]
- Nasrin, T.; Sharma, A.K.; Muttil, N. Impact of short duration intense rainfall events on sanitary sewer network performance. Water 2017, 9, 225. [Google Scholar] [CrossRef] [Green Version]
- Bénédittis, J.D.; Bertrand-Krajewski, J.L. Infiltration in sewer systems: Comparison of measurement methods. Water Sci. Technol. 2005, 52, 219–228. [Google Scholar] [CrossRef] [PubMed]
- Karpf, C.; Krebs, P. Quantification of groundwater infiltration and surface water inflows in urban sewer networks based on a multiple model approach. Water Res. 2011, 45, 3129–3136. [Google Scholar] [PubMed]
- Karpf, C.; Krebs, P. Modelling of groundwater infiltration into sewer systems. Urban Water J. 2013, 10, 221–229. [Google Scholar] [CrossRef]
- Wittenberg, H.; Aksoy, H. Groundwater intrusion into leaky sewer systems. Water Sci. Technol. 2010, 62, 92–98. [Google Scholar] [CrossRef]
- Brito, R.S.; Almeida, M.C.; Matos, J.S. Estimating flow data in urban drainage using partial least squares regression. Urban. Water J. 2016, 14, 467–474. [Google Scholar] [CrossRef]
- Staufer, P.; Scheidegger, A.; Rieckermann, J. Assessing the performance of sewer rehabilitation on the reduction of infiltration and inflow. Water Res. 2012, 46, 5185–5196. [Google Scholar] [PubMed]
- Shehab, T.; Moselhi, O. Automated detection and classification of infiltration in sewer pipes. J. Infrastruct. Syst. 2005, 11, 165–171. [Google Scholar] [CrossRef]
- Fernandez, F.J.; Seco, A.; Ferrer, J.; Rodrigo, M.A. Use of neurofuzzy networks to improve wastewater flow-rate forecasting. Environ. Model. Softw. 2009, 24, 686–693. [Google Scholar] [CrossRef]
- Haimi, H.; Mulas, M.; Corona, F.; Vahala, R. Data-derived soft-sensors for biological wastewater treatment plants: An overview. Environ. Model. Softw. 2013, 47, 88–107. [Google Scholar] [CrossRef]
- Imrie, C.E.; Durucan, S.; Korre, A. River flow prediction using artificial neural networks: Generalisation beyond the calibration range. J. Hydrol. 2000, 233, 138–153. [Google Scholar] [CrossRef]
- Fathian, F.; Mehdizadeh, S.; Sales, A.K.; Safari, M.J.S. Hybrid models to improve the monthly river flow prediction: Integrating artificial intelligence and non-linear time series models. J. Hydrol. 2019, 575, 1200–1213. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy Logic Toolbox, for Use with Matlab. Available online: https://www.mathworks.com/help/pdf_doc/fuzzy/fuzzy.pdf (accessed on 6 June 2020).
- Alvisi, S.; Franchini, M. Fuzzy neural networks for water level and discharge forecasting with uncertainty. Environ. Model. Softw. 2011, 26, 523–537. [Google Scholar] [CrossRef]
- Moghaddasi, M.; Bazzazi, A.A.; Aalianvari, A. Prediction of ground water inflow rate using non-linear multiple regression and ANFIS models: A case study of Amirkabir tunnel in Iran. In Proceedings of the International Black Sea Mining&Tunnelling Symposium, Trabzon, Turkey, 2–4 November 2016. [Google Scholar]
- Tsai, M.; Abrahart, R.J.; Mount, N.; Chang, F.J. Including spatial distribution in a data-driven rainfall runoff model to improve reservoir inflow forecasting in Taiwan. Hydrol. Process. 2012, 28, 1055–1070. [Google Scholar] [CrossRef] [Green Version]
- Christodoulou, S.; Deligianni, A.; Aslani, P.; Agathokleous, A. Risk-based asset management of water piping networks using neurofuzzy systems. Comput. Environ. Urban Syst. 2009, 33, 138–149. [Google Scholar] [CrossRef]
- Kaloop, M.; EI-Diasty, M.; Hu, J. Real-time prediction of water level change using adaptive neuro-fuzzy inference system. Geomat. Nat. Hazards Risk 2017, 8, 1320–1322. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks a Comprehensive Foundation, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1994. [Google Scholar]
- Zounemat-Kermani, M.; Stephan, D.; Barjenbruch, M.; Hinkelmann, R. Ensemble data mining modeling in corrosion of concrete sewer: A comparative study of network-based (MLPNN & RBFNN) and tree-based (RF, CHAID, & CART) models. Adv. Engin. Inform. 2020, 43, 101030. [Google Scholar]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Hornik, K. Approximation capabilities of multilayer feedforward networks. Neural Netw. 1991, 4, 251–257. [Google Scholar] [CrossRef]
- Zhu, S.; Heddam, S.; Nyarko, E.K.; Hadzima-Nyarko, M.; Piccolroaz, S.; Wu, S. Modeling daily water temperature for rivers: Comparison between adaptive neuro-fuzzy inference systems and artificial neural networks models. Environ. Sci. Pollution Res. 2019, 26, 402–420. [Google Scholar] [CrossRef]
- Heddam, S.; Kisi, O.; Sebbar, A.; Houichi, L.; Djemili, L. Predicting water quality indicators from conventional and nonconventional water resources in Algeria country: Adaptive neuro-fuzzy inference systems versus artificial neural networks. In The Handbook of Environmental Chemistry; Springer: Berlin/Hidelberg, Germany, 2019; pp. 1–22. [Google Scholar]
- FMI Finnish Meteorological Institute. Sadetta Ja Poutaa. Available online: http://ilmatieteenlaitos.fi/sade (accessed on 6 June 2020).
- Saltikoff, E.; Nevvonen, L. First experiences of the operational use of a dual-polarisation weather radar in Finland. Meteorol. Z. 2011, 20, 323–333. [Google Scholar] [CrossRef]
- Peura, M. Rack-a program for anomaly detection, product generation, and compositing. In Proceedings of the 7th European Conference on Radar in Meteorology and Hydrology (ERAD 2012), Toulouse, France, 25–29 June 2012. [Google Scholar]
- Leinonen, J.; Moisseev, D.; Leskinen, M.; Petersen, W.A.A. Climatology of disdrometer measurements of rainfall in Finland over five years with implications for global radar observations. J. Appl. Meteorol. Climatol. 2014, 51, 392–404. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Fuzzy sets. Inf. Control. 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Jang, J.-S.R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Manag. Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?–Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef] [Green Version]
- Normalization. Available online: https://en.wikipedia.org/wiki/Normalization_(statistics) (accessed on 6 June 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variables | Time (hours); Wastewater flow rate (cubic meters) |
| Output Variable | Predicted wastewater flow at the corresponding time in hours |
| Stations | Rainfall-Threshold Values | RMSE ANFIS | RMSE MLPNN |
|---|---|---|---|
| Station 1 | 0.3 | 0.0962 (dry weather), 0.1199 (wet weather) | 0.5328 (dry weather), 0.4272 (wet weather) |
| 1 | 0.106 (dry weather), 0.138 (wet weather) | 0.5247 (dry weather), 0.3334 (wet weather) | |
| 2 | 0.1035 (dry weather), 0.1492 (wet weather) | 0.5228 (dry weather), 0.2084 (wet weather) | |
| Station 2 | 0.3 | 0.076 (dry weather), 0.097 (wet weather) | 0.3932 (dry weather), 0.3566 (wet weather) |
| 1 | 0.0774 (dry weather), 0.1035 (wet weather) | 0.3932 (dry weather), 0.2495 (wet weather) | |
| 2 | 0.0775 (dry weather), 0.112 (wet weather) | 0.3938 (dry weather), 0.1072 (wet weather) |
| Stations | Rainfall-Threshold Values | R2 ANFIS | R2 MLPNN |
|---|---|---|---|
| Station 1 | 0.3 | 0.8661 (dry weather), 0.8351 (wet weather) | 0.6103 (dry weather), 0.6139 (wet weather) |
| 1 | 0.8622 (dry weather), 0.8034 (wet weather) | 0.5247 (dry weather), 0.4731 (wet weather) | |
| 2 | 0.8501 (dry weather), 0.6701 (wet weather) | 0.6092 (dry weather), 0.4565 (wet weather) | |
| Station 2 | 0.3 | 0.9146 (dry weather), 0.6218 (wet weather) | 0.7341 (dry weather), 0.5972 (wet weather) |
| 1 | 0.9443 (dry weather), 0.5881 (wet weather) | 0.7273 (dry weather), 0.4472 (wet weather) | |
| 2 | 0.6678 (dry weather), 0.8765 (wet weather) | 0.7256 (dry weather), 0.6381 (wet weather) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Laakso, T.; Wang, Z.; Pulkkinen, S.; Ahopelto, S.; Virrantaus, K.; Li, Y.; Cai, X.; Zhang, C.; Vahala, R.; et al. Comparative Study of AI-Based Methods—Application of Analyzing Inflow and Infiltration in Sanitary Sewer Subcatchments. Sustainability 2020, 12, 6254. https://doi.org/10.3390/su12156254
Zhang Z, Laakso T, Wang Z, Pulkkinen S, Ahopelto S, Virrantaus K, Li Y, Cai X, Zhang C, Vahala R, et al. Comparative Study of AI-Based Methods—Application of Analyzing Inflow and Infiltration in Sanitary Sewer Subcatchments. Sustainability. 2020; 12(15):6254. https://doi.org/10.3390/su12156254
Chicago/Turabian StyleZhang, Zhe, Tuija Laakso, Zeyu Wang, Seppo Pulkkinen, Suvi Ahopelto, Kirsi Virrantaus, Yu Li, Ximing Cai, Chi Zhang, Riku Vahala, and et al. 2020. "Comparative Study of AI-Based Methods—Application of Analyzing Inflow and Infiltration in Sanitary Sewer Subcatchments" Sustainability 12, no. 15: 6254. https://doi.org/10.3390/su12156254