Development Report:
Virtual Mooring Buoy “ABA” for Multiple Autonomous Underwater Vehicles Operation
Yuya Nishida*1, Junichi Kojima*2, Yuzuru Itoh*3, Kenkichi Tamura*4, Harumi Sugimatsu*5, Kangsoo Kim*4, Taku Sudo*6, and Tamaki Ura*1
*1Kyushu Institute of Technology
2-4 Hibikino, Wakamatsu, Kitakyushu, Fukuoka 808-0196, Japan
*2KDDI R&D Laboratories
2-1-15 Ohara, Fujimino, Saitama 356-8502, Japan
*3Ocean Engineering Research, Inc.
503 Koshin Building, 1-28-3 Takadanobaba, Shinjuku, Tokyo 169-0075, Japan
*4National Maritime Research Institute
6-38-1 Shinkawa, Mitaka, Tokyo 181-0004, Japan
*5The University of Tokyo
4-6-1 Komaba, Meguro, Tokyo 153-8505, Japan
*6IHI Corporation
1 Shin-Nakahara, Isogo, Yokohama 235-0031, Japan

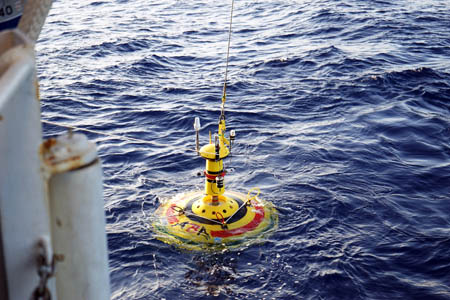
Virtual Mooring Buoy "ABA"
- [1] Y. Nishida et al., “Hovering Type AUV Tuna-Sand and Its Surveys on Smith Caldera in Izu-Ogasawara Ocean Area,” Proc. of MTS/IEEE OCEANS, 130510-001, 2013.
- [2] Y. Nishida et al., “Development of an autonomous buoy system for AUV,” Proc. of MTS/IEEE OCEANS, 141205-249, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.