
Abstract
The game-theoretic problem of choosing optimal strategies for oligopoly market agents with linear demand functions and nonlinear cost functions is considered. Necessary conditions for the existence of a solution of a system of nonlinear equations with power functions are established. The system of equations for the optimal responses of agents is linearized by expanding the power functions in Taylor series. As a result, the linearized system depends on the vector of linearization parameters, and the calculation of game equilibria is reduced finding fixed points of nonlinear mappings. The deviations of the approximate equilibrium from the exact solution are investigated. Analytical formulas for calculating equilibria in the game of oligopolists under an arbitrary level of Stackelberg leadership are derived. Analysis of duopoly and tripoly demonstrates that the game equilibrium is determined by two factors as follows. First, the concavity of the agent’s cost function (the positive scale effect) leads to an increase in his payoff compared to the agents with convex cost functions (the negative scale effect). Second, the agent’s payoff increases if he is a Stackelberg leader; however, the advantage of his environment by the type of cost function reduces the effect of the second factor.








Similar content being viewed by others


Notes
Really, substituting \(\hat{b}={Q}_{\rm{max}}^{2}b\) and \({\hat{B}}_{i}={Q}_{\rm{max}}^{{\beta }_{i}}{B}_{i}\) from (9c) into the formula \({\delta }_{i}^{r}\) (10a) with qi = νi and \({q}_{i}=\frac{{Q}_{i}}{{Q}_{\rm{max}}}\) yields \({\delta }_{i}^{r}=2+\frac{{Q}_{max}^{{\beta }_{i}}{B}_{i}{\beta }_{i}\left({\beta }_{i}-1\right)}{{Q}_{max}^{2}b}{\left(\frac{{Q}_{i}}{{Q}_{max}}\right)}^{{\beta }_{i}-2}+{S}_{i}^{r}=-{u}_{i}+{S}_{i}^{r}\).
References
Karmarkar, U. S. & Rajaram, K. Aggregate Production Planning for Process Industries under Oligopolistic Competition. Eur. J. Oper. Res. 223(3), 680–689 (2012).
Ledvina, A. & Sigar, R. Oligopoly Games under Asymmetric Costs and an Application to Energy Production. Math. Financ. Econom. 6(4), 261–293 (2012).
Currarini, S. & Marini, M. A. Sequential Play and Cartel Stability in Cournot Oligopoly. Appl. Math. Sci. 7(1-4), 197–200 (2013).
Vasin, A. Game-Theoretic Study of Electricity Market Mechanisms. Procedia Comput. Sci. 31, 124–132 (2014).
Sun, F., Liu, B., Hou, F., Gui, L., and Chen, J.Cournot Equilibrium in the Mobile Virtual Network Operator Oriented Oligopoly Offloading Market,Proc. 2016 IEEE Int. Conf. Commun. (ICC 2016), no. 7511340.
Nash, J. Non-cooperative Games. Ann. Math. no. 54, 286–295 (1951).
Cournot, A. A. Researches into the Mathematical Principles of the Theory of Wealth. (Hafner, London, 1960).
Naimzada, A. K. & Sbragia, L. Oligopoly Games with Nonlinear Demand and Cost Functions: Two Boundedly Rational Adjustment Processes. Chaos, Solit. Fractal. 29(3), 707–722 (2006).
Askar, S. & Alnowibet, K. Nonlinear Oligopolistic Game with Isoelastic Demand Function: Rationality and Local Monopolistic Approximation. Chaos, Solit. Fractal. no. 84, 15–22 (2016).
Naimzada, A. & Tramontana, F. Two Different Routes to Complex Dynamics in a Heterogeneous Triopoly Game. J. Differ. Equat. Appl. no. 21(7), 553–563 (2015).
Cavalli, F., Naimzada, A. & Tramontana, F. Nonlinear Dynamics and Global Analysis of a Geterogeneous Cournot Duopoly with a Local Monopolistic Approach Versus a Gradient Rule with Endogenous Reactivity. Commun. Nonlin. Sci. Numer. Simulat. no. 23(1-3), 245–262 (2015).
Stackelberg, H. Market Structure and Equilibrium. 1st ed (Springer-Verlag, Berlin, 2011).
Chong, J.-K., Ho, T.-H. & Camerer, C. A Generalized Cognitive Hierarchy Model of Games, Games Econom. Behavior no. 99, 257–274 (2016).
Berger, U., De Silva, H. & Fellner-Röhling, G. Cognitive Hierarchies in the Minimizer Game. J. Econom. Behavior Organizat. no. 130, 337–348 (2016).
Bowley, A. L. The Mathematical Groundwork of Economics. (Oxford Univ. Press, Oxford, 1924).
Geraskin, M. I. & Chkhartishvili, A. G. Game-Theoretic Models of an Oligopoly Market with Nonlinear Agent Cost Functions. Autom. Remote Control 78(no. 9), 1631–1650 (2017).
Geraskin, M. I. The Properties of Conjectural Variations in the Nonlinear Stackelberg Oligopoly Model. Autom. Remote Control 81(no. 6), 1051–1072 (2020).
Intriligator, M. D. Mathematical Optimization and Economic Theory. (Prentice Hall, Englewood Cliffs, 1971).
Geraskin, M. I. Modeling Reflexion in the Non-Linear Model of the Stakelberg Three-Agent Oligopoly for the Russian Telecommunication Market. Autom. Remote Control 79(no. 5), 841–859 (2018).
Korn, G. & Korn, T. Mathematical Handbook for Scientists and Engineers: Definitions, Theorems, and Formulas for Reference and Review. (McGraw-Hill, New York, 1968).
Yakovlev, M. N. Nonnegative Solutions of Systems of Nonlinear (in Particular, Difference) Equations. Tr. Mat. Inst. Akad. Nauk SSSR 96, 111–116 (1968).
Geras’kin, M. I. & Chkhartishvili, A. G. Analysis of Game-Theoretic Models of an Oligopoly Market under Constrains on the Capacity and Competitiveness of Agents. Autom. Remote Control 78(no. 11), 2025–2038 (2017).
Aizenberg, N., Stashkevich, E. & Voropai, N. Forming Rate Options for Various Types of Consumers in the Retail Electricity Market by Solving the Adverse Selection Problem. Int. J. Public Administrat. no. 42(15-16), 1349–1362 (2019).
Paccagnan, D., Kamgarpour, M., and Lygeros, J.On Aggregative and Mean Field Games with Aapplications to Electricity Markets, Proc. 2016 Eur. Control Conf. (ECC 2016), 2017, no. 7810286, pp. 196–201.
Prosvirkin, N., Blinova, E. & Gerasimov, K. Multicriteria Optimization Model of the Interaction of Elements when Managing Network Integrated Structures. Espacios no. 40(40), 1–10 (2019).
Author information
Authors and Affiliations
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Proof of Proposition 1. For ensuring the condition \({q}_{i}\ \in \left(0,1\right)\), normalize the action vector of agents by the formula
The value \({Q}_{\rm{max}}=\frac{a-M{C}_{\min }}{b}\), \(M{C}_{\rm{min}}=\mathop{\rm{min}}\limits_{i\in N}\left({B}_{i}{\beta }_{i}{Q}_{i}^{{\beta }_{i}-1}\right)\), is given by the market volume formula for an oligopoly with infinitely many firms; for details, see [18]. Find the coefficients of Eqs. (7) for the normalized action vector by equating the values of the utility function (1) for the action vectors qi, i ∈ N, and Qi, i ∈ N:
Substitute (A.1) into this expression, and compare the coefficients at the same powers of the actions vector to arrive in formulas (9c). Therefore, (7) can be written as
The nonlinear component of Eqs. (A.3) is the function \(f({q}_{i})={\hat{B}}_{i}{\beta }_{i}{q}_{i}^{{\beta }_{i}-1}\). In the neighborhood of a number νi such that \({\nu }_{i}\in \left(0,1\right)\) and νi < qi, this function is expanded in the Taylor series
If there exists a number \({\Omega }_{i}={\nu }_{i}+{\theta }_{i}\left({q}_{i}-{\nu }_{i}\right)\) such that νi < Ωi < qi (i.e., \(\theta \in \left(0,1\right)\)), this series has the remainder in the Lagrangian form [20] calculated by
The series is convergent if \(\left|{q}_{i}-{\nu }_{i}\right|<{r}_{i}\) and \(\mathop{\rm{lim}}\limits_{k\to \infty }{R}_{k}\left({q}_{i}\right)=0\). Hence, take a small number ri such that 0 < ri < Ωi, and establish the existence of the limit of the remainder sequences. Since \({r}_{i}\in \left(0,{\Omega }_{i}\right)\), it follows that Ωi > qi − νi, and consequently \(\frac{{\left({q}_{i}-{\nu }_{i}\right)}^{k}}{{\Omega }_{i}^{k}}>\frac{{\left({q}_{i}-{\nu }_{i}\right)}^{k+1}}{{\Omega }_{i}^{k+1}}\), with \(k!={\prod}_{j = 1}^{k}j\) and \(j\ge \left|{\beta }_{i}-j\right|\). This means that \(\frac{{\prod}_{j = 1}^{k}\left|{\beta }_{i}-j\right|}{{\prod}_{j = 1}^{k}j}>\frac{{\prod}_{j = 1}^{k+1}\left|{\beta }_{i}-j\right|}{{\prod}_{j = 1}^{k+1}j}\). Therefore, \(\mathop{\rm{lim}}\limits_{k\to \infty }{R}_{k}\left({q}_{i}\right)=0\), and the Taylor series with the remainder (A.4) converges to the function \(f\left({q}_{i}\right)={\hat{B}}_{i}{\beta }_{i}{q}_{i}^{{\beta }_{i}-1}\).
Up to the first term only, the Taylor expansion of the function \(f\left({q}_{i}\right)\) has the form \(\bar{f}\left({q}_{i}\right)={\hat{B}}_{i}{\beta }_{i}{\nu }_{i}^{{\beta }_{i}-1}+{\hat{B}}_{i}{\beta }_{i}\left({\beta }_{i}-1\right){\nu }_{i}^{{\beta }_{i}-2}\left({q}_{i}-{\nu }_{i}\right)\). Hence, (A.3) can be written as (9b), and the remainder (A.4) is
Now estimate the error generated by replacing the solution of the original system (7) by the solution of the linearized system (9b). The functions Fi that describe the left-hand sides of Eqs. (7) are decreasing in Qi in the neighborhood of the local maximum of the utility function (1), because \(F_{i{Q_i}}^\prime = {u_i} - S_i^r < 0\) under condition (8). The functions \({\hat{F}}_{i}\) corresponding to the left-hand sides of Eqs. (9b) are decreasing as well due to the inequality
which holds under condition (8). Note that in formula (A.6), \(\frac{\partial {S}_{i}^{r}}{\partial {q}_{i}}=\frac{\partial {S}_{i}^{r}}{\partial {Q}_{i}}\frac{\partial {Q}_{i}}{\partial {q}_{i}}=0\); for details, see [17].
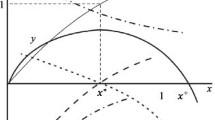
In accordance with Fig. 1, the deviation of the solution \({q}_{i}^{* }\) of system (9b) from the exact solution \({Q}_{i}^{* }\) of system (7) reduced to the units of measurement Qi using the normalization procedure (A.1), i.e., the deviation \(\Delta {Q}_{i}^{* }={Q}_{i}^{* }-{\hat{Q}}_{i}^{* }\), is
In view of the coefficients calculated by formulas (9c), the expression (A.6) takes the form
Due to (8a), this expression is equal to \(\hat F_{i{q_i}}^\prime =-b{Q}_{\rm{max}}^{2}\left[2-({u}_{i{\rm{max}}}+2){\nu }_{i}^{{\beta }_{i}-2}+{S}_{i}^{r}\right]\), where \({u}_{i{\rm{max}}}={u}_{i}\left({Q}_{\rm{max}}\right)\). Substituting this expression and (A.5) into (A.7) gives
As was demonstrated in [17], \(\left|{S}_{i}^{r}\right|<{S}_{\rm{max}}=\frac{m}{m-1-{\upsilon }_{\rm{max}}}\), where \({\upsilon }_{\rm{max}}=\frac{{\psi }_{\rm{max}}{\left(1+\sqrt{{\psi }_{\rm{max}}}\right)}^{2}}{m\sqrt{{\psi }_{\rm{max}}}}\), ψmax ≈ 1, ψmax < 1, and m denotes the number of environmental agents for agent i, m ≥ 2. Then, letting ψmax = 1 − ε, where 0 < ε ≪ 1, yields the approximate formula \({\upsilon }_{\rm{max}}\approx \frac{1-\varepsilon }{m}{\left(2-\frac{\varepsilon }{2}\right)}^{2}{\left(1-\frac{\varepsilon }{2}\right)}^{-1}\). Therefore, in the general case,
Since uimax is bounded due to (8a), Smax is also bounded [17] for m ≥ 2. This means that if ri → 0, then \(\left|{q}_{i}-{\nu }_{i}\right|\to 0\), and consequently \(\mathop{\rm{lim}}\limits_{r\to 0}\left|\Delta {Q}_{i}^{* }\right|=0\).
To proceed, study the existence of a solution of system (7). Consider the following system of equations, which obviously has the same solution as system (7):
Use the conditions formulated in Theorem 3 of the paper [21] for the vector function \({{\bf{f}}}^{r}=\left\{{f}_{i}^{r},i\in N\right\}\): if the Jacobian matrix \({\bf{J}} = \left\{ {f_{i{Q_j}}^\prime ,i,j \in N} \right\}\) of system (7) has diagonal dominance, i.e.,
then system (A.8) has a unique solution. (Hereinafter, the superscript r is omitted.)
Since \(f_{i{Q_i}}^\prime = - b\left( {{u_i} - {S_i}} \right)\), \(f_{i{Q_j} = b\left( {1 + S_{i{Q_j}}^{r/}} \right)}^\prime\), and \({lim}_{{Q}_{j}\to \infty }\frac{\partial {S}_{i}^{r}}{\partial {Q}_{j}}=0\) (for details, see [17]), for sufficiently large Qi the nth order Jacobian matrix Jn for system (A.8) has the form
where gi = ui − Si < 0, i ∈ N, due to (8). The inverse \({{\bf{J}}}_{n}^{-1}\) exists if the determinant of the Jacobian matrix is ΔJN ≠ 0; this determinant can be calculated [17] using the formula
Therefore, the condition ΔJn ≠ 0 is equivalent to \(\sum _{i\in N}\frac{1}{{g}_{i}+1}\ne 1\) and gi ≠ 0 ∀ i ∈ N; see [17]. In this case, condition (A.9) has the form \(-{g}_{i}-\left(n-1\right)>0\), i ∈ N, which gives
Note that system (7) does not satisfy the hypotheses of Theorems 1 and 2 of the paper [21]. (More specifically, the derivatives \(F_{i{Q_i}}^\prime\) and \(F_{i{Q_j}}^\prime\) do not have different signs.) Hence, the existence of a nonnegative solution cannot be guaranteed. This issue was considered in [22].
However, condition (A.10) is not necessary: if it does not hold, system (7) may still have a solution. Formulate a necessary condition for the existence of a solution of system (7), resting on its geometrical interpretation as the intersection point of the optimal response lines in the case n = 2. Assume that there exist functions \({\bar{F}}_{i}\) obtained by expressing the actions of agent i via the actions of his environmental agents (denoted by − i) from Eqs. (7), i.e., the optimal response functions are \({Q}_{i}={\bar{F}}_{i}\left({Q}_{-i}\right)\). Introduce the deviations of the responses of agents i and j in the form \({G}_{ij}\left({Q}_{i},{Q}_{j}\right)={\bar{F}}_{i}-{\bar{F}}_{ij}^{-1}\), where \({\bar{F}}_{ij}^{-1}\) is the inverse of the function \({\bar{F}}_{j}\), obtained by expressing Qi from Fj. If the solution \(\left\{{Q}_{i}^{* },i\in N\right\}\) of system (7) exists, then
Since \(\bar F_{i{Q_j}}^\prime \frac{{\partial {Q_i}}}{{\partial {Q_j}}} = {x_{ji}}\) and \({\left({\bar{F}}_{ij}^{-1}\right)^{\prime} }_{{Q}_{j}}={u}_{i}-{S}_{i}\), where xji < 0 due to [17] and ui − Si < 0 by (8), the functions \({\bar{F}}_{i}\) and \({\bar{F}}_{ij}^{-1}\) are monotonically decreasing in Qj on the corresponding interval where these conditions hold. Therefore, for \({Q}_{i}^{* }\) the functions \({G}_{ij}\left({Q}_{i}^{* },{Q}_{j}\right)\) are monotonically increasing in Qj on the interval \(\left({\bar{Q}}_{j},{Q}_{\rm{max}}\right)\) (or monotonically decreasing with an alternative form \({G}_{ij}={\bar{F}}_{ij}^{-1}-{\bar{F}}_{i}\)), i.e.,
if ∣xji∣ < ∣ui − Si∣ (or ∣xji∣ > ∣ui − Si∣ under \({G}_{ij}={\bar{F}}_{ij}^{-1}-{\bar{F}}_{i}\)). In other words, the monotonicity condition of the function Gij has the form
In view of (8a), the boundary \({\bar{Q}}_{j}\) of this interval can be calculated from condition (8) using the formula
The monotonic function is bounded on the closed interval \({A}_{j}=\left[{\bar{Q}}_{j},{Q}_{\rm{max}}\right]\), i.e., by the Weierstrass theorem,
Due to condition (A.11), it follows that m ≤ 0 ≤ M. In accordance with the intermediate value theorem (also known as the Bolzano–Cauchy theorem), \({\bar{Q}}_{j}\le {Q}_{j}^{* }\le {Q}_{\rm{max}}\). Hence, the joint fulfillment of (A.12) and \(0\le {\bar{Q}}_{j}\le {Q}_{\rm{max}}\) is a necessary condition for (A.11) on the interval \(\left({\bar{Q}}_{j},{Q}_{\rm{max}}\right)\).
This condition becomes sufficient if, in addition, m and M have opposite signs:
(Under (A.12) the function Gij is monotonic, and due to (A.13) the monotonicity interval includes the point \({G}_{ij}\left({Q}_{i}^{* },{Q}_{j}\right)=0.\)) Derive a convenient form of condition (A.13): for the equations of system (7), \({\bar{F}}_{ij}^{-1}\) can be written as
Since conditions (A.13) must hold for all values of the actions, consider the case in which the actions of all agents, except for agents i and j, are equal to \({\bar{Q}}_{k}\). Then from the expression (A.14) it follows that
Let \({\bar{F}}_{i}\left({\bar{Q}}_{j}\right)<{\bar{F}}_{ij}^{-1}\left({\bar{Q}}_{j}\right)\), i.e., \({G}_{ij}\left({Q}_{i}^{* },{\bar{Q}}_{j}\right)<0;\) then, due to the monotonic decrease of \({\bar{F}}_{i}\left({Q}_{j}\right)\), the condition \({\bar{F}}_{i}\left({Q}_{\rm{max}}\right)>{\bar{F}}_{ij}^{-1}\left({Q}_{\rm{max}}\right)\), i.e., \({G}_{ij}\left({Q}_{i}^{* },{Q}_{\rm{max}}\right)>0\), holds for \(\left|{x}_{ji}\right|<\left|{u}_{i}-{S}_{i}\right|\). Substituting Qj = Qmax and \({\bar{Q}}_{k}\) into the ith equation of system (7) yields
where κi denotes the solution of this equation. Since the functions Fi are monotonically decreasing under condition (8), the inequality \({F}_{i}\left({{\boldsymbol{\kappa }}}_{j}\right)>0\) implies κj < κi, and vice versa. Hence, condition (A.13) can be written as follows: if \({F}_{i}\left({{\boldsymbol{\kappa }}}_{j}\right)>0\) and \(\left|{x}_{ji}\right|<\left|{u}_{i}-{S}_{i}\right|\) for all i, j ∈ N, then m and M have opposite signs. ■
Proof of Proposition 2. From Eqs. (9a) it follows that
which gives (10a).
System (10a) can be solved using Cramer’s rule. Also, take advantage of the materials includes in the Appendix of the paper [17]. The left-hand sides of system (10a) are analogous to system (A.2) from [17]. Therefore, the principal determinant has the form
The existence of a unique solution of system (10a) is established by the Cramer theorem [20]: a linear system of equations has a unique solution if the principal determinant is Δ ≠ 0. From the principal determinant formula it follows that
Therefore, the solution of system (10a) exists if
The auxiliary determinant of system (10a) corresponding to the ith unknown is calculated via the following transformations:
-
1)
The factor αi is taken from the ith row.
-
2)
Zeros are created in the ith column.
-
3)
The determinant is expanded with respect to the elements of the ith column with decreasing order.
-
4)
The resulting determinant is sequentially expanded into the sums of determinants for each row.
-
5)
In this expansion the determinants having the same rows (columns) are equal to zero, and the other determinants correspond to either the principal determinant or the auxiliary determinant of system (A.2) from the paper [17].
For example, for i = 2 these transformations have the form
where Δ−i is the principal determinant of system (10a) without the ith equation and without the ith unknown. For the auxiliary determinant of a fourth-order system (e.g., for i = 1), these transformations have the form
The induction-based generalization of these expressions to the class of arbitrary order systems leads to the formula
which in turn gives formula (10b).
Demonstrate in which cases the roots (10c) satisfy conditions (10d), i.e.,
The conditions \(\left|{q}_{i}-{\nu }_{i}\right|<{r}_{i}\) and νi < qi jointly hold if for the roots (10c) there exists a function \({G}_{i}={q}_{i}^{* }\left({\nu }_{i}\right)-{\nu }_{i}\) such that \({G}_{i}\in \left(0,{r}_{i}\right)\) on the interval \({\nu }_{i}\in \left(0,1\right)\). In this case, the condition \({r}_{i}\in \left(0,{\Omega }_{i}\right)\) is true if \({\Omega }_{i}={\nu }_{i}+{\theta }_{i}\left({q}_{i}^{* }-{\nu }_{i}\right)>{r}_{i}\), i.e., \({\theta }_{i}>\frac{{r}_{i}-{\nu }_{i}}{{q}_{i}^{* }-{\nu }_{i}}>\frac{{r}_{i}-{\nu }_{i}}{{r}_{i}}\). Hence, \(1>{\theta }_{i}>\frac{{r}_{i}-{\nu }_{i}}{{r}_{i}}\). Note that in this inequality, the case ri − νi < 0 is possible for small values νi. Therefore, in this case condition (A.15) holds for any \({\theta }_{i}\in \left(0,1\right)\).
Since the function Gi is continuous under condition (10b), the inclusion Gi ∈ (0, ri) holds if on the interval \({\nu }_{i}\in \left(0,1\right)\) the function Gi has at least one zero. In the sequel, the subscript i will be omitted, because conditions (A.15) must hold for all i ∈ N. From (10c) it follows that
Finally analyze the behavior of the function Gi at the boundaries of the interval \(\nu \in \left(0,1\right)\). For this purpose, find the right-hand limits of the coefficients \(\alpha \left(\nu \right),\delta \left(\nu \right)\) as ν → 0 + 0:
Hence, limν→0+0q* = 0, which means that limν→0+0G = − 0. In other words, as ν → 0 on the right the function G → 0 from below, i.e., \(G\left(\nu \to 0+0\right)<0\). Find the left-hand limits of the coefficients \(\alpha \left(\nu \right),\delta \left(\nu \right)\) as ν → 1 − 0:
since \(\mathop{\rm{lim}}\limits_{Q\to {Q}_{\rm{max}}}\left({u}_{i}+2\right)=0\) by (8a);
due to (8). Therefore,
In accordance with [17], \(\left|{S}_{i}^{r}\right|\le 1\), which gives
This number exceeds 1, i.e.,
under the condition
The function Gi changes sign on the interval \({\nu }_{i}\in \left(0,1\right)\). Hence, by the Cauchy theorem [20] it has at least one zero on this interval. ■
Rights and permissions
About this article

Cite this article
Geraskin, M. Approximate Calculation of Equilibria in the Nonlinear Stackelberg Oligopoly Model: A Linearization Based Approach. Autom Remote Control 81, 1659–1678 (2020). https://doi.org/10.1134/S0005117920090064
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0005117920090064