
Abstract
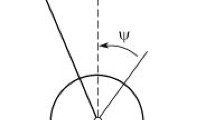
The paper deals with the problem of the Reaction Wheel Pendulum stabilization about unstable (inverted) position for arbitrary initial conditions. Considered mechanical system consists of a physical pendulum with a symmetric disk attached to the end of the pendulum, which is free to spin about an axis parallel to the axis of rotation of the pendulum. The disk is actuated by a DC-motor. The coupling torque generated by the angular acceleration of the disk is used to control of the pendulum. The switching control law is proposed to swinging up the pendulum and balancing it about the inverted position. The nonlinear swinging up control law is proposed ensuring global stabilization of the pendulum about inverted position. The Energy-based Speed-gradient (EBSG) control scheme is used to designing the swinging-up controller. The modification of the EBSG method is proposed to ensure attainability of the inverted position of the pendulum for all initial states of the system. The balance controller is designed on the basis of the Variable Structure Control with forced sliding mode. Numerical simulation results are presented showing achievement of the posed control goal by means of the control action of small magnitude.
Similar content being viewed by others

References
Andrievsky, B.R., Stabilization of the Inverted Reaction Wheel Pendulum, in Upravlenie v fizikotehnicheskikh sistemakh (Control in Physical and Technical Systems), Fradkov, A.L., Ed., St. Petersburg: Nauka, 2004, pp. 52–71.
Andrievsky, B.R., Blekhman, I.I., Bortsov, Yu.A., et al., Upravlenie mekhatronnymi vibratsionnymi ustanovkami (Control of Mechanotronic Vibrational Units), Blekhman, I.I. and Fradkov, A.L., Eds., St. Petersburg: Nauka, 2001.
Andrievsky, B.R. and Fradkov, A.L., Izbrannye glavy teorii avtomaticheskogo upravleniya s primerami na yazyke MATLAB (Selected Chapters of the Automatic Control Theory with Examples in MATLAB), St. Petersburg: Nauka, 1999.
Andrievsky, B.R., Guzenko, P.Ju., and Fradkov, A.L., Control of Nonlinear Vibrations of Mechanical Systems via the Method of Velocity Gradient, Autom. Remote Control, 1996, vol. 57, no. 4, part 1, pp. 456–467.
Andrievsky, B.R., Stockii, A.A., and Fradkov, A.L., Velocity-Gradient Algorithms in Control and Adaptation Problems, Autom. Remote Control, 1988, vol. 49, no. 12, part 1, pp. 1533–1564.
Beznos, A.V., Grishin, A.A., Lenskii, A.V., Ohotsimskii, D.E., and Formal’skii, A.M., A Flywheel Use-based Control for a Pendulum with a Fixed Suspension Point, Izv. Ross. Akad. Nauk, Teor. Sist. Upravlen., 2004, no. 1, pp. 27–38.
Grishin, A.A., Lenskii, A.V., Okhotsimsky, D.E., Panin, D.A., and Formal’skii, A.M., A Control Synthesis for an Unstable Object. An Inverted Pendulum, Izv. Ross. Akad. Nauk, Teor. Sist. Upravlen., 2002, no. 5, pp. 14–24.
Miroshnik, I.V., Nikiforov, V.O., and Fradkov, A.L., Nelineinoe i adaptivnoe upravlenie slozhnymi dinamicheskimi sistemami (Nonlinear and Adaptive Control of Complex Dynamic Systems), St. Petersburg: Nauka, 2000.
Pervozvanskii, A.A., Kurs teorii avtomaticheskogo upravleniya (Course of Automatic Control Theory), Moscow: Nauka, 1986.
Utkin, V.I., Skol’zyashchie rezhimi v zadachakh optimizatsii i upravleniya, Moscow: Nauka, 1981. Translated under the title Sliding Modes in Control Optimization, New York: Springer-Verlag, 1992.
Fradkov, A.L., Kiberneticheskaja fizika. Principy i primery (Cybernetical Physics: Principles and Examples), St. Petersburg: Nauka, 2003.
Fradkov, A.L., Speed-Gradient Scheme and Its Application in Adaptive Control Problems, Autom. Remote Control, 1979, vol. 40, no. 9, pp. 1333–1342.
Fradkov, A.L., Adaptivnoe upravlenie v slozhnykh sistemakh (Adaptive Control in Complex Systems), Moscow: Nauka, 1990.
Akulenko, L.D., Parametric Control of Oscillations and Rotations of Physical Pendulum, J. Appl. Math. Mech., 1991, vol. 57, no. 2, pp. 82–91.
Åström, K.J. and Furuta, K., Swinging up a Pendulum by Energy Control, Automatica, 2000, vol. 36, no. 2, pp. 287–295.
Fradkov, A.L., Andrievsky, B.R., and Boykov, K.B., Nonlinear Excitability Analysis with Application to Two-pendulum System, Proc. 21st IASTED Conf. “Modeling, Identification and Control” (MIC 2002), Innsbruck, 2002, pp. 374–379.
Fradkov, A.L., Swinging Control of Nonlinear Oscillations, Int. J. Control, 1996, vol. 64, no. 6, pp. 1189–1202.
Fradkov, A.L. and Pogromsky, A.Yu., Introduction to Control of Oscillations and Chaos, Singapore: World Scientific, 1998.
Lenci, S. and Rega, G., Numerical Control of Impact Dynamics of Inverted Pendulum Through Optimal Feedback Strategies, J. Sound Vib., 2000, vol. 236, no. 3, pp. 505–527.
Mori, S., Nishihara, H., and Furuta, K., Control of Unstable Mechanical Systems. Control of Pendulum, Int. J. Control, 1976, vol. 23, no. 5, pp. 673–692.
Schmid, Chr., An Autonomous Self-rising Pendulum. Invited Paper, Proc. Eur. Control Conference ECC’99, Karlsruhe, 1999.
Shiriaev, A., Pogromsky, A., Ludvigsen, H., et al., On Global properties of Passivity-based Control of an Inverted Pendulum, Int. J. Robust. Nonlin. Control, 2000, vol. 10, no. 4, pp. 283–300.
Shiriaev, A.S., Egeland, O., Ludvigsen, H., and Fradkov, A.L., VSS-version of Energy-based Control for Swinging up a Pendulum, Syst. Control Let., 2001, vol. 44, no. 1, pp. 45–56.
Spong, M.W., Corke, P., and Lozano, R., Nonlinear Control of the Reaction Wheel Pendulum, Automatica, 2001, vol. 37, pp. 1845–1851.
Spong, M. and Tsao, T.-Ch., Mechatronics Education at the University of Illinois, Proc. 14th World Congress of IFAC, Beijing, 1999, no. M-6a-01-1.
Wiklund, M., Kristenson, A., and Åström, K., A New Strategy for Swinging up an Inverted Pendulum, Preprint of 12th IFAC World Congress, 1993, vol. 9, pp. 151–154.
Author information
Authors and Affiliations
Additional information
Original Russian Text © B.R. Andrievsky, 2009, published in Upravlenie Bol’shimi Sistemami, 2009, No. 24, pp. 258–280.
Rights and permissions
About this article
Cite this article
Andrievsky, B.R. Global stabilization of the unstable Reaction-Wheel Pendulum. Autom Remote Control 72, 1981–1993 (2011). https://doi.org/10.1134/S0005117911090189
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0005117911090189