
Abstract
Migration is a key process in the population dynamics of numerous insect species, including many that are pests or vectors of disease. Identification of insect migrants is critically important to studies of insect migration. Radar is an effective means of monitoring nocturnal insect migrants. However, species identification of migrating insects is often unachievable with current radar technology. Special-purpose entomological radar can measure radar cross-sections (RCSs) from which the insect mass, wingbeat frequency and body length-to-width ratio (a measure of morphological form) can be estimated. These features may be valuable for species identification. This paper explores the identification of insect migrants based on the mass, wingbeat frequency and length-to-width ratio, and body length is also introduced to assess the benefit of adding another variable. A total of 23 species of migratory insects captured by a searchlight trap are used to develop a classification model based on decision-tree support vector machine method. The results reveal that the identification accuracy exceeds 80% for all species if the mass, wingbeat frequency and length-to-width ratio are utilized, and the addition of body length is shown to further increase accuracy. It is also shown that improving the precision of the measurements leads to increased identification accuracy.
Similar content being viewed by others

Introduction
Many organisms of numerous taxa migrate in the lower atmosphere. Among these aerial migrants, insects, which represent largest quantity of species and have abundant biodiversity, influence population dynamics, provide ecosystem services, spread plant and zoonotic diseases and cause sudden outbreaks of crop pests1,2,3. Long-distance migration is indispensable in the life-cycle of many insect species4. Effective monitoring of insect migration is extremely important to the study of ‘Migration Entomology’, because it reveals the behavioral adaptations that facilitate these movements and contributes to understanding how migration events change with climatic cycles5,6. However, most insects are too small for visual observation and may fly at night, at hundreds of meters above the ground, making it difficult to track them. Radar is the most effective tool for monitoring insect migration because it can directly detect migrating insects without perturbing them. Since the 1960s, radar has been applied to study the migration processes and phenomena of insects7. Several significant contributions have been made in applications of current entomological radar such as with respect to insect layering, navigation, wind-related orientation and collective orientation behaviors8,9,10,11.
Current zenith-pointing linear-polarized small-angle conical-scan (ZLC) entomological radars have the capabilities of mass measurement and wingbeat frequency retrieval12,13, which have the potential to facilitate identification of migratory insects4. The mass retrieval of migratory insects based on radar cross-sections (RCSs) has long been studied with the objective of achieving improved accuracies14,15. The backscattered signal amplitude modulation induced by wing beating has been used to extract the wingbeat frequency for many years13,16; however, for some targets, a frequency cannot be retrieved. Recent research has demonstrated that the mass estimated from RCSs and the wingbeat frequency estimated using the micro-Doppler effect have uncertainty levels of ~±40% and ~±1 Hz, respectively14,17. In addition, a linear relationship has been observed between the radar shape (see ref.14 for details) and the target shape parameter (e.g., the body length-to-width ratio)14, which can be expected to provide further information on the target’s identity. Body length is also widely used in insect size characterization. However, there is no indication that the body length can be measured with radar, although it is likely to be strongly correlated with mass. In summary, the mass, wingbeat frequency and length-to-width ratio are the radar-derived parameters available for making identifications of species undertaking migrations.
Previous studies of insect species migration and identification differentiated locusts from most other migrant species based on their characteristics (size, shape, and wing beating) and trajectory information (speed, direction, and orientation) obtained via ZLC radars12. Moreover, it was demonstrated that insect classification can be divided into broad taxon classes based on the mass and RCS shape parameters18. However, to date, little progress has been reported in the automatic multi-class identification of insect migrants based on entomological radar observations. The identification of different insect species is a typical multi-class classification task and can be solved by various machine learning algorithms. Previous research identified 35 species of moths based on support vector machine (SVM)19 and four other methods (Bayes, instance-based learning, decision trees and random forests)20, and showed that that the SVM algorithm produced the best identification results21.
In this paper, we adopted a new formulation of the SVM algorithm known as the decision-tree SVM (DTSVM) to classify different insect migrants based on their physical features. This method can objectively analyze the space between different classes using class separability22. Twenty-three species of migratory insects captured by a searchlight trap were included in the study. The parameters (mass, wingbeat frequency and length-to-width ratio) of these species were measured and used to construct the classification model, after which the body length was also introduced to provide an additional dimension for discriminating between different target species. Additionally, the identification accuracy was constrained based on the measurement precision of entomological radars in actual applications; therefore, the relationship between the identification accuracy and the measurement precision of these parameters was also analyzed. These findings provide new insights for future radar applications of the species identification of migratory insects.
Results
Materials
A ground-based vertical-pointing searchlight trap equipped with a 1,000 W metal-halide lamp, which was used for sampling high altitude migrating insects up to 500 m above ground level, was placed on top of a house that was 8 m above sea level on Beihuang Island (38°40′N, 120°93′E)23. Beihuang, an island located at the center of the Bohai Gulf in northern China, is located in a migration corridor between Shandong Peninsula and Liaoning Peninsula24,25, and 119 species of migratory insects have been documented in this place, such as Loxostege sticticalis (Lepidoptera: Pyralidae), Helicoverpa armigera (Lepidoptera: Noctuidae) and Spodoptera exigua (Lepidoptera: Noctuidae), which are serious crop pests in northern China and have been studied in detail for many years26,27,28. The trapping process was conducted on all fair nights from August to October 2015, except during periods of rain or power outage. The attracted insects were captured with a sweep net and subsequently identified by species. The trapped individual insects that were not in sufficiently good condition to fly were discarded, and the species with insufficient specimen numbers were excluded from the analysis. Ultimately, 5532 individual migratory insects belonging to 23 species remained.
The primary information on the 23 species is shown in Table 1. For later convenience, each species is identified using a distinguishing class label (an uppercase letter) and color (see Fig. 1), and hereinafter, the specific label and color are adopted to represent each species. The insect mass was measured using an electronic balance with measurement accuracy of 0.1 mg. The insect body length and width were measured using a steel rule with a minimum scale of 1 mm, and the length-to-width ratio was then also calculated. To measure the wingbeat frequency, individual insects were collected and were subsequently anaesthetized with ether. After that, a steel wire of about 10 cm length was glued to the back of each specimen which was then hoisted in an incubator29. In our experiments, the wingbeat frequency was measured by a stroboscope, and the steady flight was needed. As we know, when the insect’s feet are detached from a surface, it is supposed to start wing-beating spontaneously. However, insects sometimes keep wing-beating only for a very short time, so the wingbeat frequency can not be measured successfully by only one time. In our experiment, many times of measurements were carried out until the steady flight happened, and then the wingbeat frequency was measured. In addition, some insects always failed to commence wing-beating or to keep steady flight, so these insects were discarded ultimately. For the steady flight of insects, the wingbeat frequency was measured using a stroboscope with a measurement accuracy of 0.01%, and in this case, the minimum precision was 1 Hz. It is important to note that the wingbeat frequency can be affected by the flying status and the ambient environment; therefore, some uncertainty exists in the measurement of the wingbeat frequency. Previous research suggested that a correction of 15% should be applied to the frequencies of grasshoppers obtained by the ‘balloon-release’ method because laboratory experiments have shown that a decrease in frequency of 10–20% occurs during the first few minutes of flight30,31. However, the unmodified measurements have been used in this study.

Distributions of the mass, wingbeat frequency and length-to-width ratio of all trapped insect samples. Note: each circle corresponds to an insect sample, with the different colors representing different insect species.
The mass, wingbeat frequency, length-to-width ratio and body length ranged from 5.2 mg to 519 mg, 18 Hz to 289 Hz, 1.8 to 13 and 4 mm to 74 mm, respectively. The distributions of the mass, wingbeat frequency, and length-to-width ratio for all insect samples are shown in Fig. 1. A large set of sample data is necessary to construct a classification model with high accuracy and robustness. The sample quantities of these species range from 29 to 1547, and certain species (C, G, L, M, P, Q and R) include less than 50 specimens. Thus, an extension of the original sample data for these species was conducted in our research. In the extension, the mean, standard deviation, and covariance of each species were calculated, and a new dataset was generated using these statistical parameters based on the normal distribution. Finally, each species was extended to 5,000 samples. For comparison, the original samples and the constructed samples are shown in Fig. 2, where Fig. 2(a–d) correspond to the original samples, and Fig. 2(e–h) correspond to the constructed samples. After the extension, the probability distribution curves appear to satisfy the normal distribution, especially (as is to be expected) for species with a small original sample set. Next, the constructed dataset was utilized to build the classification model of the 23 insect species. The extension samples of each species were equally divided into two datasets for training and testing.

Probability distribution curves of the mass, wingbeat frequency, length-to-width ratio and body length of all trapped species: (a–d) original samples and (e–h) constructed samples.
Separability analysis of different features
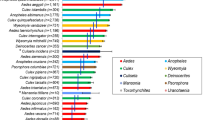
For intuitive analysis, the distributions of the mass, wingbeat frequency, length-to-width ratio and body length of all trapped insects are given in Fig. 3, where the X-axis represents different insect species, and the Y-axis represents the physical features. Each line segment in Fig. 3 indicates the median and min-max range of the feature parameter. The wingbeat frequency of most species ranges from 20 Hz to 80 Hz and it is evident that the overlap is severe, whereas the ranges of the mass and body length are narrow, which could improve separability. A better discrimination of different species can be observed from the distributions of the two-dimensional features in Fig. 4. For instance, as shown in Fig. 4(a), the mass of certain species overlaps in the range of 150 mg to 350 mg, but a subset of these species (e.g., M, V, and S) can be identified by including the wingbeat frequency in the identification process (Fig. 4(a)). To identify as many insect species as possible with high recognition rates, it is better to combine additional features. The mass, wingbeat frequency and length-to-width ratio can be retrieved by existing entomological radar; therefore, we constructed a classification model based on these three features. Although the mass and body length appear to be strongly correlated, as shown in Fig. 4(d), the body length was included to assess its contribution to the identification as an extra variable. A detailed analysis is given in the following sections.

Distributions of the physical features of all trapped species.

Pairwise correlations of the physical features of all trapped species. Note: The linear distributions in (f) arise because all specimens of these species had identical width measurements.
Species identification of migratory insects
First, the mass, wingbeat frequency and length-to-width ratio were used to identify the 23 trapped species. The classification scheme is shown in Fig. 5(a), where the multi-class classification problem is converted into several binary classification problems and SVM is used to develop a classifier for each binary classification problem. The cascade sequences of these binary classifiers are automatically built based on the separability factor (refer to Equation (1) in the Method section). Each SVM classifier is trained and determined based on the training samples. Figure 5(b) gives the classification scheme based on the mass, wingbeat frequency, length-to-width ratio and body length. The binary trees become noticeably different when the body length is introduced. See the Methods section for the details of the scheme construction.

Classification schemes: (a) based on the mass, wingbeat frequency and length-to-width ratio; (b) based on the mass, wingbeat frequency, length-to-width ratio and body length. Note: The blue circles with numbers represent SVM classifiers, and the green circles with uppercase letters represent insect species. For a better figure arrangement, the subsequent classifiers after SVM 12 are placed on the right in (a), and a similar arrangement is used in (b).
After all classifiers are trained with training samples, the testing samples are used to assess the classification performance, and the results are given in Table 2. For the classification scheme based on the mass, wingbeat frequency and length-to-width ratio, the identification accuracy ranges from 84% to 100% with a mean value of 97%. The high identification accuracies indicate that the proposed classification scheme based on the mass, wingbeat frequency and length-to-width ratio is useful and robust in the identification of the 23 trapped species. For the classification scheme based on the mass, wingbeat frequency, length-to-width ratio and body length, the identification accuracies of all species are improved, with species A, I, K, M and T particularly benefitting from inclusion of the additional parameter; specifically, the mean identification accuracy increases to 98%. Therefore, the body length can also be considered as a feature for species identification.
Measurement precision requirements
The measurement precision of the mass, wingbeat frequency, length-to-width ratio and body length is high for the trapped insects, because these measurements were made indoors with high-precision instruments. Unfortunately, both the precision of radar measurements of the insect RCSs and the retrieval accuracy of the physical features based on laboratory-measured RCSs are not yet of this sufficient. Therefore, the identification performance was evaluated under different measurement precisions to offer an indicator for the entomological radar when it is applied in species identification of migratory insects.
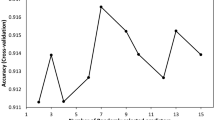
Different measurement errors were introduced in the training and testing samples of the 23 insect species. Four different errors were considered, as listed in Table 3, where the standard deviations of the wingbeat frequency measurement errors are all 1 Hz. In Case I, the mass, wingbeat frequency and length-to-width ratio are used in the classification. The root mean square percent error (RMSPE) of the mass is set to 40%, which is consistent with the current retrieval accuracies under laboratory conditions, and that of the length-to-width ratio is also set to 40%. Case II and Case III demonstrate the identification accuracy improvement if the RMSPE values of both the mass and length-to-width ratio decrease from 40% to 20% and subsequently to 10%. In Case IV, the body length is introduced as an extra variable to improve the identification performance, assuming that the body length can be retrieved with an RMSPE of 10%.
The testing samples with different measurement errors were processed using the classification scheme that was trained with the corresponding training samples, and the classification results are listed in Table 4. For Case I, the mean identification accuracy is 56%, which implies that the current entomological radar has low identification performance. However, when the RMSPEs of the mass and length-to-width ratio decrease from 40% to 20% and subsequently to 10%, the mean identification accuracy increases to 71% and subsequently to 84%. Additionally, the introduction of the body length with an RMSPE of 10% further improves the identification performance, with a mean identification accuracy of 88%. Therefore, improving the mass and length-to-width ratio measurements could significantly contribute to the identification performance, and the introduction of an extra variable could improve it further.
Discussion
This study demonstrates that the mass, wingbeat frequency and length-to-width ratio, as well as the body length, can be utilized to identify insects with high accuracy using the DTSVM method. By analyzing the identification accuracy for different measurement errors, we found that improving the measurement precisions of the mass and length-to-width ratio can greatly facilitate the identification of migratory insects; therefore, the radar measurement precision of insect RCSs and the precision of feature retrieval based on laboratory-measured RCSs must be further improved to achieve better identification. In addition, current entomological radars are unable to measure the body length, which restricts further improvement in the identification performance. Therefore, development of new radar techniques that can measure the body length, or some other additional characteristics of the target, would be beneficial.
Furthermore, these four features might be unstable and vary with the ambient environment (e.g., air temperature affecting wing-beat frequency) and biological factors (e.g., age and the conditions in which the insects developed). These issues complicate insect identification and requires further investigation12. One reason for why the ranges of the mass and body length are narrow might be that the insects were trapped in the same place from a single migration corridor: it is highly likely that the samples consist of individuals undertaking migration, and thus exhibit a uniform physiological condition. For application at other sites, similar analyses of samples from those sites might be required.
The classification schemes proposed here have been developed for the 23 migratory species captured in the Bohai Gulf and are successful for these species. However, when more diverse fauna are considered, the method may exhibit higher rates of incorrect identification. Realistically, for a certain site during a particular season, the number of major migratory insect species is usually small, and other migratory pests may be present only in small numbers, so that there is no need to consider them. Thus, there is no need to consider these species. If an additional insect species becomes common at the observation site, it can be incorrectly identified. Thus, a category that does not fit any of the training classes is needed, a topic that should be fully investigated in the future.
Methods
Classification method
SVM was originally designed as a binary classifier, and it can be applied to multi-class classification problems when combined with a decision tree. DTSVM can avoid error accumulation in the training and modeling processes32. The process of constructing an identification model can be divided into the following two steps. The first step is a modeling step, in which a binary tree model is constructed by converting the multi-class classification problem into several binary classification problems. The second step is a training step in which SVM is used to train each binary classifier and obtain a predictive model that links the parameters to the labels.
Construction of a binary tree model
To construct a classification model, we must convert an N-class classification problem into a sequence of N-1 two-class classification problems. The classification model is a binary tree with N-1 nodes and n leaf nodes. Each node represents a binary SVM classifier, and each leaf node represents one class (Fig. 5). The hierarchical structure of the model depends on the separability of two subclasses. The classification performance of models with different hierarchical structures greatly differs, and therefore, a reasonable hierarchical structure is critically important. To establish an effective structure, a reasonable inter-class separability measure must be defined for the two classes.
Consider a dataset \(\{({{\boldsymbol{x}}}_{1},{y}_{1}),\ldots ,({{\boldsymbol{x}}}_{l},{y}_{l})\}\), \({{\boldsymbol{x}}}_{{\boldsymbol{i}}}\in {R}^{n},i=1,\ldots \,l\), and \({y}_{i}\) is the associated class label. To evaluate the separability of different species, the sample center \({{\bf{m}}}_{i}\) of each class is calculated via the K-means method33. Thus, the inter-class separability factor (ICSF) of class \(i\) and class \(j\) can be defined as follows34:
where \(d({{\bf{m}}}_{i},{{\bf{m}}}_{j})\) represents the Euclidean distance between the sample centers of class \(i\) and class \(j\) and \({{\sigma }_{i}}^{2}\) represents the sample variance of class \(i\).
The misidentification rate of two subclasses decreases as \(d{m}_{ij}\) increases, and the subclasses with the largest ICSF are the most separable. To avoid error propagation, the node with the lowest misidentification rate should be placed at the top of the binary tree. The process of constructing a binary tree is described as follows.
Step 1: Using the training dataset, compute the ICSF of each pair of known subclasses according to Eq. (1). Find the smallest value of the ICSF, and merge the two corresponding subclasses into one. Note that the two subclasses with the smallest ICSFs are the most inseparable.
Step 2: Repeat step 1 with the new and smaller set of classes. Continue, constructing a binary tree, until all classes have been combined.
Step 3: Reverse the tree such that subclasses that are most separable are placed at the top of the tree. After this step, the multi-class classification model is thus built.
Support vector machine
SVM is a machine-learning technique that has been successfully applied in several domains including insect identification. The library of Support vector machines (LIBSVM35), one of the most widely used pieces of SVM software packages, is used to solve each two-class classification problem.
Data availability
The datasets analyzed in this study are available from the corresponding author upon reasonable request.
References
Chapman, J. W., Reynolds, D. R. & Wilson, K. Long-range seasonal migration in insects: mechanisms, evolutionary drivers and ecological consequences. Ecol. Lett. 18, 287–302 (2015).
Vilaplana, L., Wilson, K., Redman, E. M. & Cory, J. S. Pathogen persistence in migratory insects: high levels of vertically-transmitted virus infection in field populations of the African armyworm. Evol. Ecol. 24, 147–160 (2010).
Hu, G. et al. Mass seasonal bioflows of high-flying insect migrants. Science. 354, 1584–1586 (2016).
Chapman, J. W., Drake, V. A. & Reynolds, D. R. Recent insights from radar studies of insect flight. Annu. Rev. Entomol. 56, 337–356 (2011).
Chapman, J. W. et al. Flight orientation behaviors promote optimal migration trajectories in high-flying insects. Science. 327, 682–685 (2010).
Holland, R. A., Wikelski, M. & Wilcove, D. S. How and why do insects migrate? Science. 313, 794–796 (2006).
Schaefer, G. W. Radar studies of locust, moth and butterfly migration in the Sahara. Proc. Royal. Entomol. Soc. Lond. C. 34, 39–40 (1969).
Wood, C. R., Clark, S. J., Barlow, J. F. & Chapman, J. W. Layers of nocturnal insect migrants at high-altitude: the influence of atmospheric conditions on their formation. Agr. Forest Entomol. 12, 113–121 (2010).
Reynolds, A. M., Reynolds, D. R., Smith, A. D. & Chapman, J. W. A single wind-mediated mechanism explains high-altitude ‘non-goal oriented’ headings and layering of nocturnally migrating insects. Proc. Biol. Sci. 277, 765–772 (2010).
Chapman, J. W. et al. Detection of flow direction in high-flying insect and songbird migrants. Current Biology. 25, 751–752 (2015).
Reynolds, A. M., Reynolds, D. R., Sane, S. P., Hu, G. & Chapman, J. W. Orientation in high-flying migrant insects in relation to flows: mechanisms and strategies. Phil. Trans. R. Soc. B. 371, (2016).
Drake, V. A. & Wang, H. Recognition and characterization of migratory movements of Australian plague locusts, Chortoicetes terminifera, with an insect monitoring radar. J Appl. Remote. Sens. 7, 075095–075095 (2013).
Wang, H. K. & Drake, V. A. Insect monitoring radar: retrieval of wingbeat information from conical-scan observation data. Comput. Electron. Agr. 43, 209–222 (2004).
Drake, V. A. et al. Ventral-aspect radar cross sections and polarization patterns of insects at X band and their relation to size and form. Int. J. Remote. Sens. 38, 5022–5044 (2017).
Hobbs, S. E. & Aldhous, A. C. Insect ventral radar cross-section polarisation dependence measurements for radar entomology. IEE Proc. Radar Sonar Nav. 153, 502–508 (2006).
Chapman, J. W., Reynolds, D. R. & Smith, A. D. Vertical-looking radar: a new tool for monitoring high-altitude insect migration. BioScience. 53, 503–511 (2003).
Wang, R., Hu, C., Fu, X. W., Long, T. & Zeng, T. Micro-doppler measurement of insect wing-beat frequencies with W-band coherent radar. Sci. Rep. 7, 1396 (2017).
Drake, V. A. Distinguishing target classes in observations from vertically pointing entomological radars. Int. J. Remote Sens. 37, 3811–3835 (2016).
Cortes, C. & Vapnik, V. N. Support-vector networks. Mach. Learn. 20, 273–297 (1995).
Bishop, C. M. Pattern Recognition and Machine Learning (Information Science and Statistics). Springer-Verlag New York (2006).
Mayo, M. & Watson, A. T. Automatic species identification of live moths. Knowl-Based. Syst. 20, 195–202 (2007).
Takahashi, F. & Abe, S. Decision-tree-based multiclass support vector machines. Ninth Internat. Conf. on Neural Information Processing. 3, 1418–1422 (2002).
Feng, H. Q., Wu, K. M., Cheng, D. F. & Guo, Y. Y. Radar observations of the autumn migration of the beet armyworm Spodoptera exigua (Lepidoptera: Noctuidae) and other moths in northern China. Bull. Entomol. Res. 93, 115–124 (2003).
Feng, H. Q., Wu, K. M., Yunxia, N. I., Cheng, D. F. & Guo, Y. Y. Nocturnal migration of dragonflies over the Bohai Sea in northern China. Ecol. Entomol. 31, 511–520 (2006).
Fu, X. W., Feng, H. Q., Liu, Z. & Wu, K. M. Trans-regional migration of the beet armyworm, Spodoptera exigua (Lepidoptera: Noctuidae), in north-east Asia. PLoS ONE. 12, e183582 (2017).
Feng, H. Q., Wu, K. M., Cheng, D. F. & Guo, Y. Y. Spring migration and summer dispersal of Loxostege sticticalis (Lepidoptera: Pyralidae) and other insects observed with radar in northern China. Environ. Entomol. 33, 1253–1265 (2004).
Feng, H. Q., Gould, F., Huang, Y. X., Jiang, Y. Y. & Wu, K. M. Modeling the population dynamics of cotton bollworm Helicoverpa armigera (Hübner) (Lepidoptera: Noctuidae) over a wide area in northern China. Ecol. Model. 221, 1819–1830 (2010).
Fu, X. W., Zhao, X. Y., Xie, B. T., Ali, A. & Wu, K. M. Seasonal pattern of Spodoptera litura (Lepidoptera: Noctuidae) migration across the Bohai Strait in northern China. J. Econ. Entomol. 108, 525 (2015).
Shi, X. Y., Feng, H. Q., Li, J. D. & Liu, B. Comparison of wingbeat frequency between oriental armyworm Mythimna separata, cotton bollworm Helicoverpa armigera and black cutworm Agrotis ypsilon. Plant Protection. 39, 31–35 (2013).
Riley, J. R. & Reynolds, D. R. Radar-based studies of the migratory flight of grasshoppers in the middle Niger area of Mali. Proc. Biol. Sci. 204, 67–82 (1979).
Weis-Fogh, T. Biology and physics of locust flight. II Flight performance of the Desert locust (Schistocerca gregaria). Phil. Trans. R. Soc. B. 239, 459–510 (1956).
Chen, H. H., Wang, Q. A. & Shen, Y. Decision tree support vector machine based on genetic algorithm for multi-class classification. J. Syst. Eng. Electron. 22, 322–326 (2011).
Jain, A. K. Data clustering: 50 years beyond K-means. Pattern. Recogn. Let. 31, 651–666 (2010).
Xue, S., Jing, X. J., Sun, S. L. & Huang, H. Binary-decision-tree-based multiclass support vector machines. International Symposium on Communications and Information Technologies. 85–89 (2014).
Chang, C. C. & Lin, C. J. LIBSVM: a library for support vector machines. ACM. T. Intel. Syst. Tec. 2, 27 (2011).
Pindyck, R. S., & Rubinfeld, D. L. Econometric Models and Economic Forecast. 4th Edition. Irwin McGraw-Hill, Boston (1998).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 31727901). The authors thank Prof. Kongming Wu from the Chinese Academy of Agricultural Sciences for valuable suggestions on insect migration, and anonymous reviewers for their careful work and thoughtful suggestions that have helped improve this paper substantially.
Author information
Authors and Affiliations
Contributions
C.H. and S.K. conceived of the idea. S.K. designed the sampling and performed the simulation. X.F. trapped and identified the insect migrants and performed the statistical analysis. R.W. and T.L. supplied technical support for the experimental configuration. S.K., R.W. and C.H. wrote the manuscript based on input from all authors. All authors provided editorial advice.
Corresponding authors
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hu, C., Kong, S., Wang, R. et al. Identification of Migratory Insects from their Physical Features using a Decision-Tree Support Vector Machine and its Application to Radar Entomology. Sci Rep 8, 5449 (2018). https://doi.org/10.1038/s41598-018-23825-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-018-23825-1
This article is cited by
-
Patterns of high-flying insect abundance are shaped by landscape type and abiotic conditions
Scientific Reports (2023)
-
Comprehensive analysis of polarimetric radar cross-section parameters for insect body width and length estimation
Science China Information Sciences (2021)
-
Deep-learning-based extraction of the animal migration patterns from weather radar images
Science China Information Sciences (2020)
-
Effect of regional wind circulation and meteorological factors on long-range migration of mustard aphids over indo-gangetic plain
Scientific Reports (2019)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
