
Abstract
Forests in the United States are managed by multiple public and private entities making harmonization of available data and subsequent mapping of management challenging. We mapped four important types of forest management, production, ecological, passive, and preservation, at 250-meter spatial resolution in the Southeastern (SEUS) and Pacific Northwest (PNW) USA. Both ecologically and socio-economically dynamic regions, the SEUS and PNW forests represent, respectively, 22.0% and 10.4% of forests in the coterminous US. We built a random forest classifier using seasonal time-series analysis of 16 years of MODIS 16-day composite Enhanced Vegetation Index, and ancillary data containing forest ownership, roads, US Forest Service wilderness and forestry areas, proportion conifer and proportion riparian. The map accuracies for SEUS are 89% (10-fold cross-validation) and 67% (external validation) and PNW are 91% and 70% respectively with the same validation. The now publicly available forest management maps, probability surfaces for each management class and uncertainty layer for each region can be viewed and analysed in commercial and open-source GIS and remote sensing software.
Design Type(s) | time series design • data integration objective • source-based data transformation objective |
Measurement Type(s) | land management |
Technology Type(s) | classifier prediction |
Factor Type(s) | temporal_interval • geographic location |
Sample Characteristic(s) | contiguous United States of America • vegetation layer • road • area of protected biodiversity • military training area • river |
Machine-accessible metadata file describing the reported data (ISA-Tab format)
Similar content being viewed by others

Background & Summary
Forests cover about a third of land area in the coterminous United States (US), with the largest tracts of forest land managed by the federal government for preservation or multiple uses1. The top ten largest private landowners in the United States own and manage forestlands primarily for forest products and, increasingly, for real estate development and investments2. Forest management practices (e.g. harvesting methods, planting decisions, prescribed fire and fire suppression, and road building) are continually changing in response to policy, socio-economic conditions, climate, and scientific knowledge3.
While the effects of management on forests are well-studied at the stand to larger management units such as a national forest scale4, little is known about how socioeconomics, land use, and management decisions influence forest ecology across landscapes larger than national forest boundaries such as regions and continents4. Without regional scale knowledge, predictions of changes from climate, land use, or policy on forest structure and function remain uncertain, thereby limiting the evaluation of management scenarios to improve forest resilience and sustainability.
Nearly 41% of US private forests have management plans5,6 but assimilating these plans to map management activities is difficult and error-prone due to non-systematic information about mixed management practices. Since many management plans are not spatially referenced they are not conducive for spatial analysis. Mapping the ecological effects of forest management across broad geographic extents remains a challenge7, therefore gaps exist in the characterization of spatial patterns in forest extent and types of forest management strategies. Climate, ecological disturbance, and forest management interact to influence ecosystem processes of forests across extensive spatial and temporal scales. However, at present, Earth systems models that examine the effects of environmental change do not sufficiently incorporate ecosystem management8 and a consistent and systematic approach to mapping forest management at regional and continental scales is needed9.
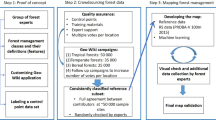
We produced forest management maps for two forested regions of the continental United States, the Southeastern Coastal Plain and Piedmont (SEUS) and the Pacific Northwest (PNW), where production is the main management strategy and production cycles are a large cause of land cover change and terrestrial carbon cycles, but different types of land ownership and forest management practices are at play (Fig. 1). The SEUS forest ecosystem is a fire-dominated system with most native trees adapted to short-period events (e.g. 3–5 years10). About 85% of SEUS forested land is privately owned, with more than half (54%) owned by corporations11. These privately-owned corporate lands are primarily managed for silvicultural production and have an average harvest rotation of 18–20 years. PNW forests ecosystem have adapted to a disturbance regime consisting of wind, fire and beetle disturbance vectors12. Two-thirds of forested land is publicly owned and 44% of private forested land is owned by corporations11. Areas managed for silvicultural production has an average harvest rotation of about 70 years.

The SEUS (a) and PNW (b) forests represent, respectively, 22.0 and 10.4% of forests in the coterminous US. The management maps were created with a random forest classifier using seasonal time-series analysis of 16 years of MODIS 16-day composite Enhanced Vegetation Index, and ancillary data. The SEUS map has an overall accuracy of 89% (10-fold cross-validation) and 67% (external validation) and the PNW map has overall accuracies of 91 and 70%. Raster resolution is 250 meters, and number of forested pixels are n = 9,810,118 for the SEUS and n = 4,638,101 for the PNW. Interstate 10 (I-10) is the southernmost interstate in the SEUS (in black).
Historically, the interaction of forest policy with land-use and economic priorities has created a mosaic of forest management types in both the SEUS and the PNW. These can be simplified into four management types9: 1) production forestry, 2) ecological forestry, 3) passive management, and 4) preservation management. The primary goal of production forestry is extraction of wood products for economic gain. Common production forestry silviculture practices include clear-cut harvesting and site preparation with fertilizer and pesticides. Ecological forestry aims to balance wood products extraction with maintenance of other forest ecosystem services, such as habitat provision, water resources and carbon storage12. Harvests occur periodically with methods like variable retention harvesting performed across decades to maintain an uneven aged forest, a practice which mimics relatively fine scale local disturbances to recreate a shifting mosaic of stand age to maintain structural complexity12. Passively managed forests are those that are largely left alone apart from occasional harvest driven by economic need or opportunity by the landowner. These include naturally regenerating forests without specific apparent management plans, which often have mixed uses, e.g. hunting or recreation areas. Preservation management maintains ecosystems based on historical or natural range of variation for conservation, cultural reasons, recreation and wildlife management. Management practices exclude harvesting but often involve prescribed fire, invasive species removal, and the planting of species to manage ecosystem composition.
Methods
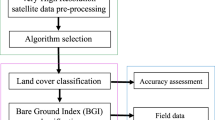
We built a random forest (RF) classifier13 to classify management types using a combination of trends, seasonality, and phenological pattern derived from the Breaks For Additive Seasonal and Trend (BFAST) algorithm analysis14 of the MODIS EVI. Ancillary covariates such as road density and forest ownership type coupled with expertly classified training samples.
MODIS Data
We used a 16-year time series (February 2000 to December 2015) of EVI collected by the MODIS Terra satellite platform. The MOD13Q1 data product is a 16-day composite (23 images per year) imaged at 250-meter spatial resolution15, resulting in 360 individual EVI images stacked to create a data cube (i.e. EVI time series).
Poor quality pixels, affected by cloud and processing errors, were identified in the MODIS Quality Assurance (QA) VI Usefulness layer. These data were used with a threshold of 0000-0100 (MOD13Q1 vegetation index quality bits 2-5) in the upper half of the quality range15. If, within the 360-band EVI data cube, we had more than 75% good data, we set the value of poor quality pixels to ‘missing,’ and linearly interpolated between the two nearest good pixels. Otherwise the pixel was left as no data. We spatially subset the EVI and QA data-cubes to the SEUS and PNW level-3 ecoregions16 (Fig. 1).
Break Detection, Spectral Entropy and Time Series Decomposition
We used the BFAST algorithm14 to decompose the EVI data cube into summary data describing trends, seasonality, and breaks in phenological pattern. The BFAST algorithm as implemented in the R system for statistical computing17 (R) decomposes a time series into trend, seasonal, and noise components and detects abrupt change, or ‘breaks’ in the seasonal and trend components, which correspond to disturbances, anthropogenic and natural14.
Due to the large size of the EVI data cube and large number of forested pixels (9,810,118 for the SEUS and 4,638,101 for the PNW) we ran the BFAST analysis on the HiPerGator High Performance Computing research cluster at Research Computing, University of Florida totaling six weeks of wall time and approximately 54,000 processing hours.
The summary statistics and break locations extracted from the BFAST summary data provided information on the frequency, timing, magnitude and direction of change occurring within the trend and seasonality components of the EVI time series (Table 1). These statistics describe the input EVI signal, the BFAST-derived seasonal, trend, and noise components to define a set of variables used in subsequent analyses. We also calculated spectral entropy18, which is a measure of time series complexity related to the number of unique sine/cosine wave series derived from a Fourier decomposition.
Additional Covariates
In addition to the BFAST summarized covariates and spectral entropy we used five other covariates for the random forest classifier to further describe the forested landscape. We created a 250-meter road density raster using OpenStreetMap data19 with the ArcGIS Linear Density tool specifying a 1-km search radius.
Forest ownership data sources from federal and nongovernment agencies were integrated for landowner type (Table 2). Six types of public ownership were identified: federal protected, federal, state protected, state, military, and local; and four types of private ownership: nongovernment organization, private, family, and corporate. The U.S. Protected Areas Database (PADUS) was the primary source for public ownership and U.S. Department of Agriculture (USDA) Forest Service for private ownership (Table 3). The USDA Forest Service defines private ownership across the coterminous United States as family, including individuals; corporate; and other private (includes conservation and natural resource organizations, unincorporated partnerships and associations, and Native American tribal lands). The spatial distribution of private ownership was modelled using Forest Inventory and Analysis (FIA) data20. Additional ownership data were cross-walked to the PADUS and USDA ownership based on management goals, skills, budgets, and interests of landowners (Table 3). Overlay analyses and manual editing rectified polygon topology problems (e.g. intersection, separation, and interlacing) to maintain spatial consistency. Public and private ownership were combined through raster processing operations to produce a 250-meter spatial resolution raster data depicting forest ownership.
For the PNW only, we created a thematic raster covariate to represent National Forest Lands with:
-
Nationally Designated Management and Use Limitations (https://data.fs.usda.gov/geodata/edw/edw_resources/shp/S_USA.OtherNationalDesignatedArea.zip),
-
National Forest System Roads (https://data.fs.usda.gov/geodata/edw/edw_resources/shp/S_USA.RoadCore_FS.zip),
-
Roadless Areas (https://data.fs.usda.gov/geodata/edw/edw_resources/shp/S_USA.RoadlessArea_2001.zip,
-
National Wild and Scenic Rivers (https://data.fs.usda.gov/geodata/edw/edw_resources/shp/S_USA.WildScenicRiver.zip) and,
-
Wilderness boundaries (http://www.wilderness.net/GIS/Wilderness_Areas.zip) for U.S. National Forest Service, U.S. Fish and Wildlife Service, U.S. Bureau of Land Management, and U.S. National Park Service.
We created proportion conifer and proportion riparian spatial data from the Landfire Existing Vegetation Type (EVT) data21 by querying “Conifer” and “Riparian” vegetation types to upscale the proportion of the 30-meter spatial resolution of Landfire data to that of the 250-meter resolution of the EVI data cube. This conceptually simple spatial cross-tabulation analysis proved computationally difficult to implement at regional extents due to the large raster sizes of 59,384,315 (9,815,810) pixels for the SEUS and 19,419,379 (4,643,335) pixels for PNW, at 30- (250-) meter spatial resolution. We overcame the memory limitations of running a spatial cross tabulation analysis in GIS software using the ArcGIS arcpy Python library to convert the raster data to tables to import to in PostgreSQL open-source Object-Relational database management system and perform the cross tabulation analysis using a sequence of SQL queries.
Training Sample Development
We created our training dataset using expert opinion and a modified Delphi method22. The USFS Forest Inventory Analysis (FIA) dataset would have been an excellent alternative if it were not already an input to the ED2 ecosystem model. Using them to validate the forest management maps would have introduced collinearity among input variables and biased subsequent ED2 model estimates. We also chose against using the FIA data because this would have required a classification of the dataset to fit our four-category categorization of forest management, a process that was beyond the scope of this study. To develop our training dataset, we placed 1000 spatially random points in forested areas in both the SEUS and PNW. Five experts (i.e. remote sensing specialists, forest ecologists, and ecosystem modellers) for the SEUS and two people for the PNW, examined each point with Google Earth, using historical imagery back-catalogue when needed, and designated one of four forest management types using expert knowledge and a rubric for each region. Landfire EVT (Physiognomy and Group Name), ownership (from PADUS and USDA ownership), Landfire Disturbance Type, and Monitoring Trends in Burn Severity were added to each test point to aid the classification of each management type. Regardless of region, points with complete or majority consensus (80%) were assigned the corresponding management type. Sites without majority agreement were discussed collaboratively, whereby the opinion of an expert could be changed by logical arguments from other participants. New consensus points were then assigned a management type. The management types of unresolved points were designated by regional forest experts. Points for which consensus was not reached were dropped from the training set (i.e. n = 22 for the SEUS, and n = 5 for the PNW).
Management Type Classification
The RF algorithm grows many classification “trees,” which are decision trees based on thresholds (explained below in fifth paragraph of this section) in the covariate values, each of which produces a classification, as well as “votes” for that class13. The algorithm then chooses the classification having the most votes compared to all “trees” in the forest. To classify a new object (a pixel) from an input set of covariates and training data, the input data are passed down each tree in the forest.
A bootstrap sampling is performed on a training set chosen n times with replacement from all available training data, N. Given the full set of input covariates, a much smaller subset of covariates is randomly selected, at each node in the tree and the best split based on the subset is used as the resulting node split to retain the most information content from the full set of covariates. The RF parameter mtry, is the size of the subset and is held constant during the forest growing whereby each tree in the forest is grown to the largest extent possible without pruning. The forest error rate depends on the correlation between any two trees in the forest, increased correlation increases overall error, and the strength of each individual tree in the forest. A low forest error rate depends on the low correlation among trees, and the increased strength of individual trees, denoting a tree is a strong classifier.
The Mean Decrease in Accuracy is estimated during the out-of-bag (OOB) error calculation phase of the RF algorithm. For each tree in the RF the held-out sample observations (those that are OOB) have predictions compared with and without randomly permuting the values for each covariate. The number of votes for the correct class using permuted data is subtracted from the number of correct votes from unpermutated data.
The spatial covariates were sampled and used to classify management into four forestry management classes. Despite a low number of training points for ecological management in the SEUS and ecological and production management in the PNW, we are confident in the performance of the RF algorithm, which is robust against unbalanced sets of training data23 and we weighted these underrepresented classes in the initial tuning of the RF model. We removed non-forest pixels, identified from a composite of years 2001-2006-2011 from National Land Cover Dataset (NLCD)24,25, from the estimation process and only those MODIS pixels that were 50% or more forest and 50% or more of one of the disturbance/intensity classes were used as training data.
We fit a full random forest model with 500 individual classification trees and seven (7) covariates tried at each split as determined to be optimal by the tuneRF() algorithm in the randomForest R package26 and post-fitting diagnostics guided the creation of a fitted random forest model used for predictions. We ran an iterative classification to remove covariates that contributed a negative increase in node purity to remove computation burden during the prediction stage. We then selected the 15 most important covariates based on decreased mean accuracy to create spatial predictions using the fitted random forest model.
Code Availability
The BFAST and RF codes, used to produce the forest management datasets, are publicly available through the figshare repository (Data Citation 1). The code consists of sets of Python (version 2.7) and sets of R (version 3.1 and higher) programming language scripts that must be run sequentially in the following order: 1) 01 MODIS Data Download Preparation.zip (R); 2) 02 Calculate proportion riparian and conifer from Landfire.zip (python); 3) 03 Running BFAST on High Performance Cluster using Moab.zip (R); 4) 04 Random forest classification.zip (python and R). Each script is also internally documented in order to both explaining its purpose (including a detailed description of the GIS-specific spatial operations that it performs) and, when required, guiding the user through its customization.
Data Records
The forest management rasters and management class probability rasters are available for each region as georeferenced GeoTIFF rasters with 250-meter resolution from PANGAEA (Data Citation 2). They can be download as 7-Zip archives (7-Zip.org). Table 4 details the specifics of each available dataset. The uncertainty layers have a horizontal resolution of 10 kilometres to match the use of the management data sets with a convenient grid cell size of the ED2 ecosystem model27. All data are viewable and analysable in commercial and open-source GIS and remote sensing software (e.g. ArcGIS 10× , ENVI 5× , ERDAS Imagine, QGIS 2× , GRASS GIS 7× ) and the raster package in R. All data are in the Albers Conic Equal Area projection (EPSG 5070), NAD 1983 datum and horizontal units in meters.
The forest management rasters (Fig. 1) contain the four categories of ecological, passive, preservation and production management types represented as numerical integers (Value field) and lexical description (Management field). The values in the probability rasters for each management class range from 0 (least likely to be the respective management class) to 1 (most likely). The uncertainty rasters depict the Bayesian simulated proportion28 of forest management type at 250 meter resolution within a 10 kilometre cell.
Technical Validation
Validation
We specified a ten-fold cross validation internal to the random forest classifier and assessed the individual contribution from each covariate to the overall accuracy of the management maps. The ten-fold cross validation randomly splits data into ten partitions, with model fitting using nine partitions, and model testing using one partition. The procedure is repeated ten times to generate the sample error as an average of the ten validation runs. This bootstrap method provides unbiased estimation of classification errors. We specified an external validation withholding approximately 20% of data from the training set described above. For each region 178 (SEUS) and 194 (PNW) of the 1000 points were omitted from the training set and used for external error analysis. We constructed an error matrix from the OOB data and external validation data, and calculated commission, omission, and overall errors.
The SEUS map (Fig. 1a) has an overall accuracy of 89% for the 10-fold cross-validation or 67% for the external validation in Table 5 and the PNW map (Fig. 1b) has overall accuracies of 91% and 70%, respectively (Table 6).
Uncertainty Analysis
To assess uncertainty when upscaling the forest management maps from 250-m spatial resolution to the 10-km grain of ED2 (ref. 27) we performed a Bayesian analysis proposed by Quaife et al.28 to model uncertainty in categorical maps aggregated to coarser spatial resolutions. The analysis calculates the posterior distribution of true management classes coupling the observed proportion of management classes in each 10-km site with a confusion matrix produced from the validation methods above, using Monte Carlo simulation to sample the posterior distribution. We considered only forested pixels within each 10-km site and used the standard deviation from the Bayesian analysis to represent uncertainty.
The uncertainty analysis quantified the amount of error when scaling the management map from 250-meter resolution to the 10-km aggregate resolution for use by ED2 (ref. 27) by modelling the proportion of each management type as they fit inside an ED2 10-km site. The maps (Fig. 2) give us the spatial distribution of uncertainty. Scatterplots of the observed proportions and the mean of the samples from posterior distribution (Fig. 3), while ignoring the spatial component, indicate fit between the Bayesian modelled and observed proportions. Recall the 978 training points of the SEUS were sub-divided into 800 for training (used for 10-fold cross-validation in the random forest model) and 178 for external validation, hence the two confusion matrices.

Uncertainty maps, expressed as a percentage, for the SEUS (a) and the PNW (b) were calculated using the mean and standard deviation posterior distributions of modeled proportions from Bayesian analysis of 250 m MODIS cells within each 10 km ED2 cell.

Forest management maps for the SEUS (a) and the PNW (b) indicate fit between the Bayesian modeled and observed proportions of the 250 m forest management cells within each 10 km ED2 cells.
In general, there is low uncertainty in the classification of forest management. (Fig. 2), however, the results from the Bayesian analysis of proportions are slightly biased at lower and higher values of the proportion of a forest management type within 10-km cells (Fig. 3). The plots from the random forest model show tighter fit to the 1:1 line (i.e. where the RF algorithm closely models the training data), while those from the external validation show greater spread and under-prediction bias at larger values of observed proportions. The under-prediction is noticeable also in the plots from the RF model (Fig. 3). We see a higher amount of uncertainty associated with peripheral pixels for each forest management type. That is, we are more certain about the forest type of the core area of a forest patch compared to the edge of the forest patch regardless of forest management type. Note the relative ‘high’ uncertainty for passive and production classes north of the highway I-10 corridor and Gulf of Mexico coast is possibly due to edge effects and/or lower total pixel counts.
In the PNW, we are most certain about our ability to classify preservation and production management. We have low confidence in the classification of ecological management, which could be because of small sample size despite the weighting during the tuning of the initial RF model. The evidence of low adjusted r-squared (0.63) from comparing the Bayesian simulation results with the observed proportion (Fig. 3) indicates that our predictions of the higher proportions of ecological forestry are not as certain as other management types. In the SEUS preservation and ecological forestry show lowest uncertainty based on adjusted r-squared of the fit between the observed proportions and those from the Bayesian analysis. Classification of passive management is the most problematic at high observed proportions, possibly because passively managed patches are probably smaller.
Usage Notes
We successfully mapped forest management in both the Southeastern U.S. coastal plain and Piedmont (SEUS) and in the U.S. Pacific Northwest forest area (PNW) using satellite derived data and expert classified training samples. Once we determined the suite of covariates and algorithm parameters from our classification of a pilot single Landsat footprint, we created forest management maps of the entire Southeastern U.S. coastal plain and Piedmont (SEUS) and in the U.S. Pacific Northwest forest area (PNW) (Fig. 1) for the composite time period 2000-2015. We mapped four management classes of ecological, passive, preservation and production management9 that collectively represent 59.29% of the SEUS of the total land cover (1,034,633. km2) and 62.80% of the PNW land cover (461,593.8 km2), and representing, respectively, 22.0% and 10.4% of the coterminous U.S. forests.
General Usage
These maps are a first attempt, as far as we know, to map forest management at regional extents in the United States. Land cover is a fundamental variable that impacts and links many parts of link between the human and physical environments. Land use is the socio-economic intent or purpose behind the management of the land surface (e.g. residential, commercial, parks and green spaces). Land cover is the biophysical covering of the land surface (e.g. forest, grassland). Changes in observed land cover patterns are the net result of individual, communal or societal decision-making processes regarding the relative returns to land use29 set within a local, regional or national context. Hence, land cover, along with pattern analysis and social science measures, can be used to infer the changing patterns in land use (i.e., to link land cover to land use).
The forest management maps have a spatial resolution of 250 m and results from an analysis of a composite of phenological patterns and changes in the patterns from February 2000 through December 2015. The maps represent a temporal composite of the 16 year time period to be used as dominant forest management conditions during this time range. These maps were created originally to represent the proportion of management classes and to parameterize forest functional types for the ecosystem dynamics simulation model ED2 (ref. 27) to simulate carbon cycling at a 10-km spatial resolution. The development of a forest management functional type framework allowed the addition of forest management practices to Earth systems models. The many varied management practices can be grouped into regionally specific sets of practices. These management functional types include a variety of approaches including the short rotation times, clearcuts, and even-age stands used by production forestry systems and the uneven aged stands with selective harvesting used by ecological forestry systems. In practice, the forest management data can be used in any ecosystem simulation model that requires explicit spatial representation of forest management classes and forest management functional types.
Following Becknell et al.9, we established four simplified categories of forest management. However, because production forestry and ecological forestry possibly represent endpoints along a gradient of production-based silviculture practices, they were difficult to clearly distinguish thematically in all cases. This gradient includes even-age stand management; clearcutting, coppicing (i.e. overstory removal), seed-tree, shelterwood and, uneven-age stand management; patch or group selection, thinning, and single tree selection30. Many of these silvicultural approaches can be readily observed through remote imagery. For instance, our classification of production forestry is based on extraction of wood products for economic gain and that can be easily applied to clearcut sites as well as some other even-age management applications. However, our classification of ecological forestry as one that mimics relatively fine scale disturbances to recreate a shifting mosaic of stand age may be harder to distinguish via remote sensing from shelterwood or patch selection timber harvest approaches. Most likely the gradient between production and ecological forestry practices would require a fuzzy logic rule set to reduce classification error31. Additionally, ecological forestry occur on lands that require follow-up management post-harvest. Franklin et al.12 defines ecological forestry as a “is a three-legged stool.” Where the legs, or principles for management, include (1) retention of biological legacies at harvest; (2) intermediate treatments that enhance stand heterogeneity; and (3) allowances for appropriate recovery periods between regeneration harvests.
We acknowledge that mapping the SEUS and PNW regions of the United States may at first appear to limit user applications, however, we posit the maps and underlying regional-scale datasets produced to date represent a salient and overdue contribution to the ecosystem modelling community in the US. The SEUS and the PNW forest regions have the largest total area of forest, compared to the other US forest regions32 with the largest area of forested timberland in the SEUS and the highest are of forested reserves in the PNW. This project concerns the major ownership types and management styles that occur in the US, therefore we began this project by looking the regions with large areas of forest and large proportions of active forested timberland, being harvested and replanted, and under various ownership types including private, private corporate, and reserved forest. We appreciate the potential for mapping forested lands over the whole of North America and endeavour to do so in a subsequent phase of this project.
All maps contain errors and in thematic maps the nature and extent of misclassifications are addressed in accuracy assessments through the use of a confusion matrix. The confusion matrices (Tables 5 and 6) were produced at a regional scale, appropriate for these maps. It is becoming more common to construct confusion matrices against higher resolution, manually interpreted satellite data28. However, Fang et al.33 noted confusion matrices developed at fine scales might have much different error rates than regional matrices. The confusion matrix also has its own suite of inherent uncertainties as the reference data itself can also contain unmeasured sources of error34. Additionally, although a confusion matrix is excellent at capturing thematic errors of omission and commission, it cannot capture all the non-thematic error that affects classification35. Ultimately, obtaining a reliable confusion matrix and associated indices can be problematic36. However, it currently remains the core accuracy assessment tool34 and the map user is limited to the data provided unless they conduct their accuracy assessment37.
The SEUS silviculture harvest occurs on a 18–25-year rotation and we have satellite imagery that nearly reaches that time frame, hence, the SEUS mapping effort captures most silvicultural activities. The PNW as harvest rotations are much longer (e.g. 40–60 years38) leading to forest harvest activities that extend beyond the period of our remote sensing data. Interpreting silvicultural activities that occurred before our period of record offered a challenge to our mapping effort (i.e. we could not discern when a patch of secondary growth forest was harvested initially). For instance, we only considered pixels mapped as forest in the 2011 NLCD in our analysis; however, PNW clearcuts mapped as non-forest in the 2001 and 2006 NLCD were omitted from our analysis resulting in some misclassification. For the PNW we suggest an alternative approach to this problem below.
Misclassifications: NLCD and PNW Clearcuts
The treatment of clearcut areas in the PNW as non-forest by NLCD is caused misclassification errors. One solution to this problem may be that the NLCD has a 2001–2011 from-to change index, most useful because it can represents succession from clearcut to forest or land use change from forest to clearcut. In other places forest to grass, grass to shrub, or shrub to forest is captured when there was a clearcut. NLCD should be used in conjunction with other vegetation transitions maps to capture the succession pathways of forest cover. For example, the Landfire Vegetation Transition Magnitude data product (https://www.landfire.gov/vtm.php) captures clearcuts and conversions from forest to pasture, agriculture, and urban reasonably well like NLCD. To map omitted clearcuts, we recommend using either the Landfire Vegetation Transition Magnitude and/or the NLCD 2001-2011 from-to product to extend the mapped forest area with the following rule set.
It is a forest if:
-
It is forest cover in Landfire 2001, 2006 or 2011,
-
It was forest cover in NLCD then transitioned to grass, or
-
Transitioned from grass to shrub or shrub to forest.
Recommendations for improved mapping methods
We recommend better spatial and temporal resolution of ancillary data (e.g. roads, ownerships, USFS management) and incorporation of local scale management plans into creation of management maps. We need better spatial and temporal representation of forest ownership. Private ownership is especially unclear when working across state boundaries as no two states have spatial and attribute consistency between tax parcel datasets. We need temporal snapshots of management maps since we developed only a composite of management aggregated from 15 years of MODIS EVI data. This is challenging as training data are needed for each time period of interest, and we would need to fully or partially automate the training methodology (e.g. image segmentation and recognition, and machine labeling of training data).
The Google Earth time slider was used to estimate the dominant forest management conditions to train the RF classifier. While it provides a retrospective view of historic forest cover conditions and spatial patterns, the time slider has limitations. The intervals of the time slider were not consistent over the two regions and are dependent on the available imagery in the Google archives. For example, imagery exists approximately every year between 2004 and 2017 for a forest tract northeast of Gainesville, Florida, while imagery of forest southeast of Hattiesburg, Mississippi is available every two to four years for the same period. Additionally, the spatial resolution and color depth varies across both regions. It is very difficult to compile a temporally consistent and high spatial resolution set of images to derive the training samples needed for the random forest classifier; hence Google Earth imagery is an attractive alternative.
The maps represent a temporal composite of forest management. To truly capture forest dynamics as they affect the carbon cycle, ideally, we would create an annual time series of management maps. Given the labor-intensive process of manually coding 1000 training samples for each region, while desirable, a time series of annual forest management conditions was prohibitive to create and beyond the scope of this effort. Automated image recognition coupled with machine learning could speed up the development of training samples and allow for repeated characterization of management practices over time.
Additional information
How to cite this article: Marsik, M. et al. Regional-scale management maps for forested areas of the Southeastern United States and the US Pacific Northwest. Sci. Data 5:180165 doi: 10.1038/sdata.2018.165 (2018).
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
References
Keenan, R. J. et al. Dynamics of global forest area: results from the FAO Global Forest Resources Assessment 2015. For. Ecol. Manag 352, 9–20 (2015).
Tew, R. D., Straka, T. J. & Cushing, T. L. The enduring fundamental framework of forest resource management planning. Nat. Resour 4, 423 (2013).
Schultz, C. Responding to scientific uncertainty in US forest policy. Environ. Sci. Policy 11, 253–271 (2008).
Heffernan, J. B. et al. Macrosystems ecology: understanding ecological patterns and processes at continental scales. Front. Ecol. Environ. 12, 5–14 (2014).
Butler, B. J. et al. Family Forest Ownerships of the United States, 2013: Findings from the USDA Forest Service’s National Woodland Owner Survey. J. For 114, 638–647 (2016).
U.S. Forest Service. Who Owns America’s Trees. Woods, and Forests? Results from the U.S. Forest Service 2011-2013 National Woodland Owner Survey (2015).
Kuemmerle, T. et al. Challenges and opportunities in mapping land use intensity globally. Curr. Opin. Environ. Sustain 5, 484–493 (2013).
Bellassen, V., Le Maire, G., Dhôte, J.-F., Ciais, P. & Viovy, N. Modelling forest management within a global vegetation model—Part 1: Model structure and general behaviour. Ecol. Model. 221, 2458–2474 (2010).
Becknell, J. M. et al. Assessing interactions among changing climate, management, and disturbance in forests: a macrosystems approach. BioScience 65, 263–274 (2015).
Mitchell, R. J. et al. Future climate and fire interactions in the southeastern region of the United States. For. Ecol. Manag 327, 316–326 (2014).
Smith, W. B., Miles, P. D., Perry, C. H. & Pugh, S. A. Forest resources of the United States, 2007: a technical document supporting the forest service 2010 RPA Assessment. U.S. Department of Agriculture, U.S. Forest Service. (2009).
Franklin, J. F., Mitchell, R. J. & Palik, B. J. Natural disturbance and stand development principles for ecological forestry. U.S. Department of Agriculture, U.S. Forest Service. (2007).
Breiman, L. Random forests. Mach. Learn. 45, 5–32 (2001).
Verbesselt, J., Hyndman, R., Zeileis, A. & Culvenor, D. Phenological change detection while accounting for abrupt and gradual trends in satellite image time series. Remote Sens. Environ. 114, 2970–2980 (2010).
Huete, A., Justice, C. & Van Leeuwen, W. MODIS vegetation index (MOD13). Algorithm Theor. Basis Doc 3, 213 (1999).
Bailey, R. G. Ecosystem geography: from ecoregions to sites. Springer Science & Business Media. (2009).
R Development Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. (2013).
Zaccarelli, N., Li, B.-L., Petrosillo, I. & Zurlini, G. Order and disorder in ecological time-series: introducing normalized spectral entropy. Ecol. Indic. 28, 22–30 (2013).
Haklay, M. & Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 7, 12–18 (2008).
Hewes, J. H., Butler, B. J., Liknes, G. C., Nelson, M. D. & Snyder, S. A. Public and private forest ownership in the conterminous United States: distribution of six ownership types-geospatial dataset (2014).
Rollins, M. G. LANDFIRE: a nationally consistent vegetation, wildland fire, and fuel assessment. Int. J. Wildland Fire 18, 235–249 (2009).
Linstone, H. A. & Turoff, M. The Delphi method: Techniques and applications 29. Addison-Wesley Reading: MA. (1975).
Cutler, D. R. et al. Random forests for classification in ecology. Ecology 88, 2783–2792 (2007).
Fry, J. A. et al. Completion of the 2006 National Land Cover Database for the conterminous United States. Photogramm. Eng. Remote Sens. 77, 858–864 (2011).
Homer, C. et al. Completion of the 2011 National Land Cover Database for the conterminous United States–representing a decade of land cover change information. Photogramm. Eng. Remote Sens. 81, 345–354 (2015).
Liaw, A. & Wiener, M. Classification and regression by randomForest. R News 2, 18–22 (2002).
Medvigy, D., Wofsy, S. C., Munger, J. W., Hollinger, D. Y. & Moorcroft, P. R. Mechanistic scaling of ecosystem function and dynamics in space and time: Ecosystem Demography model version 2. J. Geophys. Res. Biogeosciences 114, 1–21 (2009).
Quaife, T. & Cripps, E. Bayesian analysis of uncertainty in the GlobCover 2009 land cover product at climate model grid scale. Remote Sens 8, 314 (2016).
Currie, J. M. The economic theory of agricultural land tenure. Cambridge University Press. (1981).
Smith, D. M., Larson, B. C., Kelty, M. J. & Ashton, P. M. S. The practice of silviculture: applied forest ecology. John Wiley and Sons, Inc. (1997).
Uricchio, V. F., Giordano, R. & Lopez, N. A fuzzy knowledge-based decision support system for groundwater pollution risk evaluation. J. Environ. Manage. 73, 189–197 (2004).
Oswalt, S. N., Smith, W. B., Miles, P. D. & Pugh, S. A. Forest Resources of the United States. 2012: a technical document supporting the Forest Service 2010 update of the RPA Assessment https://doi.org/10.2737/WO-GTR-91 (2014).
Fang, S., Gertner, G., Wang, G. & Anderson, A. The impact of misclassification in land use maps in the prediction of landscape dynamics. Landsc. Ecol 21, 233–242 (2006).
Foody, G. M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 80, 185–201 (2002).
Stehman, S. V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 62, 77–89 (1997).
Pontius, R. G. Jr & Millones, M. Death to Kappa: birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 32, 4407–4429 (2011).
Kleindl, W. J., Rains, M. C., Marshall, L. A. & Hauer, F. R. Fire and flood expand the floodplain shifting habitat mosaic concept. Freshw. Sci 34, 1366–1382 (2015).
Hansen, A. J. et al. Alternative silvicultural regimes in the Pacific Northwest: simulations of ecological and economic effects. Ecol. Appl. 5, 535–554 (1995).
Data Citations
Marsik, M., & Stevens, F. R. Figshare https://doi.org/10.6084/m9.figshare.5566882 (2018)
Marsik, M. et al. PANGAEA https://doi.org/10.1594/PANGAEA.880304 (2017)
Acknowledgements
W.J.K., J.H., C.-S.F., D.Y. and M.W.B. were supported by funding from the United States National Science Foundation Macrosystems Biology grant EF-1241860, “Building forest management into Earth system modeling”. This work is part of the MANDIFORE (MANagement and DIsturbance in FORest Ecology) project. The funders had no role in study design, data collection and analysis, decision to publish, and preparation of the manuscript.
Author information
Authors and Affiliations
Contributions
M.M. performed the BFAST and random forest analysis, implemented data validation and uncertainty analysis, and drafted and edited the manuscript. C.G.S. reviewed background literature, co-created the study design and created training samples for the SEUS and commented on the manuscript draft. W.J.K. created training samples for the PNW and provided, text, comments and edits to the manuscript draft. J.M.H. created training samples for the SEUS and provided comments and edits to the manuscript draft. C.-S.F. created training samples for the SEUS, developed the training sample protocol and ownership covariates, and provided comments to the manuscript draft. D.Y. created training samples for the SEUS and provided comments and edits to the manuscript draft. M.W.B. co-created the study design, created training samples for the SEUS and provided comments and edits to the manuscript draft. F.R.S. developed the BFAST and random forest workflow and provided comments to the manuscript draft.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
ISA-Tab metadata
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/ The Creative Commons Public Domain Dedication waiver http://creativecommons.org/publicdomain/zero/1.0/ applies to the metadata files made available in this article.
About this article

Cite this article
Marsik, M., Staub, C., Kleindl, W. et al. Regional-scale management maps for forested areas of the Southeastern United States and the US Pacific Northwest. Sci Data 5, 180165 (2018). https://doi.org/10.1038/sdata.2018.165
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/sdata.2018.165
This article is cited by
-
Effects of ownership patterns on cross-boundary wildfires
Scientific Reports (2021)
-
Integrating regional and interregional approaches to identify ecological security patterns
Landscape Ecology (2021)
