
Abstract
In modern electrical traction drives, a variable dc-link voltage can be applied to increase efficiency in partial load. A dc-dc converter can supply a variable dc-link voltage and transfer energy between the battery and the dc-link. Hybrid cars combine the advantages of long driving ranges with the partial zero-emission operation. In series-hybrid drive trains, a switched reluctance machine can be used as a generator for the range extender unit. This paper presents at first the mechanism of energy transfer between the battery and the dc-link. Further, a control parameter analysis of an inverter topology for a switched reluctance machine, which combines the dc-dc converter for the power transfer between the battery and the dc-link with the inverter for the generator, is investigated. For this analysis, the control parameters turn-on, freewheeling and turn-off angle are varied to test the controllability of the energy transfer between these two components. The simulation results of the presented analysis are finally validated with measurements on the test bench.
Similar content being viewed by others

1 Introduction
All-electric vehicles have the disadvantage of longer charging times than the refueling time of cars with an internal combustion engine (ICE). Combining electrical drive trains with an ICE enables the advantages of an all-electric car, for example, zero-emission driving, with the advantages of an ICE car, e.g., long driving range. In series hybrid topologies the different energy sources are coupled electrically [1].
A variable dc-link voltage offers advantages for the traction drive [2]. Hence, a range extender system based on a switched reluctance generator (SRG) and an inverter, which enables a variable dc-link voltage for the traction drive, is presented in [3]. Based on the work presented in that paper, the possibility of controlling the electrical output power and the mechanical power of the proposed system (see Fig. 1) simultaneously is discussed here.

System overview
Due to the high non-linearity of switched reluctance machines (SRMs), for control of SRMs in single-pulse operation a lookup table (LUT) is commonly utilized to map the commanded torque \(T^{*}\) to the three control angles switch-on angle \(\theta _{\textrm{on}}\), freewheeling angle \(\theta _{\textrm{free}}\), and switch-off angle \(\theta _{\textrm{off}}\) [4,5,6]. These LUTs are precalculated to locate the optimal angles. However, the applied inverter topology requires an overview of its behavior. This understanding is provided by the analysis strategy presented here as it firstly simulates and secondly analyzes the inverter topology over a wide range of control angles.
For the simulative analysis, a high-speed SRG, which was previously developed for range extender units, is used [7]. It offers a nominal power of 20 kW at 25000 rpm. The SRG is operating in single-pulse operation at nominal speed. The inductance profiles are available from finite element analysis (FEA).
Different publications, for example [8, 9], deal with the influence of the control angle selection on the efficiency or acoustics. However, this publication focuses on the identification of the new topology and proofs the controllability of this topology.
2 Operating Principle
For SRMs in single-pulse operation the turn-on angle \(\theta _{\textrm{on}}\), the freewheeling angle \(\theta _{\textrm{free}}\), and the turn-off angle \(\theta _{\textrm{off}}\) are manipulated to control the machine. Many optimization approaches were presented for single-pulse operation with an asymmetrical half bridge or the Miller topology [8, 10, 11]. For the examined application, the control variables are torque T at nominal speed \(n_{\textrm{n}}\) and the electrical output power \(P_{\textrm{dc-link}}\) available for the traction drive. The output power \(P_{\textrm{dc-link}}\) is calculated by subtracting the mechanical power \(P_{\textrm{mech}}\) of the magnetization power \(P_{\textrm{mag}}\) required to magnetize the SRM. For this, the mechanical power \(P_{\textrm{mech}}\) is defined as negative for generator operation. Figure 2 shows the co-energy loop of an ideal SRM. The co-energy loop surrounds the area of mechanical energy \(W_{\textrm{mech}}\) which is converted in one magnetization cycle [4]. This mechanical energy Wmech is calculated by the phase voltage uph(t), the phase current iph(t), and the phase resistance Rph (1).

Co-energy loop of an SRG
The integral is evaluated in the limits between the moment ton corresponding to the turn-on angle \(\theta_{\text{on}}\) and the moment \(t_{i_\mathrm{ph} = 0}\) corresponding to the angle \(\theta_{\text{OA}}\) at which the demagnetization of the phase is finished. The green area is the magnetization energy \(W_{\textrm{mag}}\). It corresponds to the magnetic energy stored in the phase inductances and calculated using the corresponding enclosed area between the phase current iph(Ψ) and the varying flux-linkage Ψ(θ) up to the free-wheeling angle θfree (2).
The moment tfree corresponds to the free-wheeling angle θfree. The area shaded in red marks the additional energy that must be provided as magnetization energy when the machine saturates [6]. To calculate the average mechanical power \(P_{\textrm{mech}}\) for one phase in one electrical magnetization cycle, the mechanical energy is divided by the electrical period \(t_{\textrm{el}}\) (see (4)). This electrical period results from (3) where \(N_{\textrm{r}}\) is the number of rotor poles of the SRM and nice is the speed of the ICE.
Analogous to the average mechanical power, the average magnetization power is calculated in Eq. (5).
The co-energy loop represents graphically the mean energies in one magnetization cycle. Depending on the chosen control angles, co-energy loops with the same mechanical energy but different magnetization energy can be achieved. Figure 3 shows the co-energy loop for the minimum (blue curve) and maximum (orange curve) output power which can be transferred at an electrical turn-on angle \(\theta _{\textrm{on}}\) of \({100}^\circ\) el. The battery \(U_{\textrm{bat}}\) and the dc-link voltages \(U_{\mathrm{dc-link}}\) are 400 V and 600 V, respectively. Both co-energy loops enclose the same mechanical energy (\(W_{\textrm{mech1}} = W_{\textrm{mech2}}\)), but the magnetization energy differs significantly (\(W_{\textrm{mag1}} \ll W_{\textrm{mag2}}\)). Thus, the output power for the blue co-energy loop is \(P_{\mathrm{dc-link,1}} = {24}\,{\hbox{kW}}\) while the output power for the orange one is \(P_{\mathrm{dc-link,2}} = {31}\,{\hbox{kW}}\).

Co-energy loop for min. (blue) and max. (orange) output power for \(\theta _{\textrm{on}} = {100}^\circ \,{\hbox{el.}}\)
3 Power Transfer
On the basis of chapter 2 the power transfer for each mode is discussed in this chapter.
A magnetization cycle is realized by magnetizing via the battery voltage \(U_{\textrm{bat}}\), free-wheeling via the zero-voltage path and demagnetizing via the full dc-link voltage \(U_{\mathrm{dc-link}}\) [3]. The magnetization power \(P_{\textrm{mag}}\) is provided by the battery. Hence, the delivered battery power \(P_{\textrm{bat}}\) is equal to the integral over time of the battery voltage Ubat multiplied with the phase current iph while the magnetization state is active (6).
The winding losses Ploss are considered and further losses, e.g., iron losses, are neglected. The resistive losses in the phase are calculated with Eq. (7). The average dc-link power \(P_{\mathrm{dc-link}}\) results from the power balance in Eq. (8). The boost mode differs from the normal mode in terms of demagnetization. This mode is limited by the condition that the dc-link voltage \(U_{\mathrm{dc-link}}\) is much larger than the battery voltage \(U_{\textrm{bat}}\). Since the voltage difference between the battery voltage \(U_{\textrm{bat}}\) and the dc-link voltage \(U_{\mathrm{dc-link}}\) is used for demagnetization and the time required for the demagnetization process increases as the demagnetization voltage decreases, the demagnetization cannot be finished before a new magnetization cycle starts [3]. Thus, the additional power is directly transferred from the battery to the dc-link during demagnetization. The battery, phase winding, and dc-link are connected in series, so the phase current \(i_{\textrm{ph}}\) flows from the battery through the phase winding into the dc-link (cf. Fig. 1). Direct power transfer means that the power is not stored in the inductance of the machine during the power transfer between the battery and the dc-link in contrast to the magnetization energy which is stored from the battery in the phase inductance and discharged from there to the dc-link. This results in an additional power transfer of Eq. (9) during the demagnetization. \(t_{\textrm{off}}\) is the time when the electric turn-off angle θoff is reached. Accordingly, the total battery power for the boost mode Pbat,boost and output power Pdc−link,boost results in Eqs. (10) and (11).
In buck mode operation, additional power can be transferred from the battery to the dc-link during magnetization but only if the battery voltage \(U_{\textrm{bat}}\) is higher than the dc-link voltage \(U_{\mathrm{dc-link}}\). For magnetization, the phase winding is connected to the battery and the dc-link, as presented at the boost mode during the demagnetization [3]. The average battery power is calculated similarly as described before in (6). The additional energy transfer is realized in buck mode during magnetization by increasing the time for magnetization due to the lower magnetization voltage of \(U_\mathrm{mag} = U_\mathrm{bat} - U_\mathrm{dc-link}\).
This results in an additional direct power transfer between the battery and the dc-link of Eq. 12. But the output power is calculated equally to (8). As a result, it can be stated that the investigated inverter topology provides additional power transfer in buck and boost mode compared to the normal mode.
4 Analysis Method
In this chapter, the analysis method is discussed. The most common way to control an SRM in single-pulse operation is to map the commanded torque \(T^{\ast}\) to the three control angles switch-on angle \(\theta _{\textrm{on}}\), freewheeling angle \(\theta _{\textrm{free}}\), and switch-off angle \(\theta _{\textrm{off}}\) [4,5,6]. These resulting LUTs are precalculated to locate the optimal angles. There are various calculation approaches like optimization methods to reduce the number of simulation points [11]. However, in this paper, the aim is to create an inverted model of the system (see Fig. 1). The forward model is not uniquely invertible because the SRM is a highly non-linear machine type. Thus, a mass simulations of the system allows to analyze and understand the dependencies between output variables (Pdc-link, Pmech) and control angles (θon, θfree, θoff).
For the analysis, thousands of operating points (OPs) are simulated in MATLAB/Simulink and filtered by the nominal mechanical power Pn. The battery voltage Ubat is set to 400 V and the mechanical speed nice is kept at the nominal machine speed \(n_{n}\) of 25000 rpm. The dc-link voltage \(U_{\mathrm{dc-link}}\) is set to 600 V for the normal mode.
Figure 4 shows the procedure for the control parameter analysis. In the first step, a set of control angles is selected. Afterward, simulations and result analyses are performed for this set of control angles. In the analysis, minimum, maximum, average, and root-meansquare (rms) values are calculated for each parameter. Then, the results are checked in terms of mechanical power \(P_{\textrm{mech}}\) whether further control angle sets need to be simulated or every nominal point was tracked.

Simulation procedure for the control angle analysis
Through pre-simulations with larger control-angle steps, the search range for the control angles is narrowed for more accurate simulations to reduce the number of simulations. Then, mass simulations with finer angular resolutions are investigated. Due to the high number of simulations, when every control angle is varied from 0 to \(360^\circ \,{\hbox{el.}}\) in one-degree steps, the turn-on angle \(\theta_{on}\) is selected in the range from \(100^\circ \,{\hbox{el.}}\) to \(180^\circ \,\hbox{el.}\) in \(10^\circ \,\hbox{el.}\) steps. The free-wheeling angle \(\theta _{\textrm{free}}\) and turn-off angle \(\theta _{\textrm{off}}\) is adjusted in \(1^\circ \,\hbox{el.}\) steps. The necessary range for turn-on, freewheeling, and turn-off angles has been determined over several iterations. Table 1 shows the final control angle set for the simulations.
The simulation is based on a flux-based SRM model [12] , shown in Fig. 5. The machine model calculates the phase flux-linkage \(\varPsi\) from the phase voltage and the ohmic voltage drop. LUTs translate the rotor position and the phase flux-linkage to a current and torque for each phase of the machine. From this torque and the speed, the average mechanical Power Pmech is calculated. The dc-link and battery currents are calculated from the phase currents and the switching signals in a virtual inverter. Coupling between phases is neglected. The battery is simulated with a voltage source with an internal resistance of \(0.1\,\Omega\). The load for the dc-link side is represented by an ideal voltage source. The topology of the inverter is the topology suggested in [3].

Simplified schematic of the MATLAB/Simulink simulation model
Due to the short simulation time, OPs are possible when demagnetization is not completed after one magnetization cycle. Therefore, the acquired data is filtered for a maximum value of 0.01 Wb for the minimum flux linkage to remove invalid OPs.
5 Simulation Results
This chapter deals with the simulation results for the normal operation mode. The simulations are exemplarily executed at a battery voltage \(U_{\textrm{bat}}\) of 400 V and a dc-link voltage \(U_{\mathrm{dc-link}}\) of 600 V.
The simulation results are filtered by the mechanical power Pmech of \(20\,{\hbox{kW}} \pm {200}\,W\) and plotted in Fig. 6.

Simulation results of normal mode at a dc-link voltage \(U_{\mathrm{dc-link}}\) of 600 V
Figure 6 (a) shows all possible OPs near the nominal generator power of 20 kW for a turn-on angle range of 100° el. to \({180}^\circ \,{\hbox{el}}\).. This figure shows the mechanical power Pmech versus the output power Pdc-link. The form of the markers indicates the different turn-on angles θon. The colors of the markers provide information on the rms phase current Iph,rms. The output power Pdc-link lies in a range from 22.8 kW up to 57.0 kW. The point density decreases with increasing output power Pdc-link, because the higher output power \(P_{\mathrm{dc-link}}\)of about 35 kW can only be achieved by high turn-on angles \(\theta _{\textrm{on}}\) (\(170^\circ \,{\hbox{el.}}\) and \(180^\circ \,{\hbox{el.}}\)).
Figure 6 (d) underlines the result by plotting the output power \(P_{\mathrm{dc-link}}\) over the free-wheeling angle \(\theta _{\textrm{free}}\). Furthermore, the rms phase current \(I_{\textrm{ph,rms}}\) decreases while the output power \(P_{\mathrm{dc-link}}\) increases for smaller turn-on angles \(\theta _{\textrm{on}}\) (\({100}^\circ \,{\hbox{el.}}\) to \({160}^\circ \,{\hbox{el.}}\)).
For higher turn-on angles \(\theta_{\text{on}}\), the rms phase current increases with the output power.
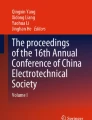
For most applications, rms currents increase with rising output power Pdc−link. As already shown, the presented system behaves in the opposite way for small turn-on angles θon. This can be explained by the waveform of the phase current iph in Fig. 7. For this figure, the same OPs as for the co-energy loop in Fig. 3 are chosen. The OP of the orange waveform transfers more power to the dc-link but causes less rms phase current than the OP of the blue waveform. For the same instantaneous torque, a lower current is required if the change in inductance is higher:
For the orange waveform the peak of the torque and current occurs at the same electrical position θel. Compared to this, the maximum current peak differs significantly in position regarding to the torque peak for the blue curve. This reduces the efficiency of the torque production and increases the rms current in the phase.

Phase current iph and phase torque Tph for min. (blue) and max. (orange) output power
The trajectories of the simulated points are almost linear and therefore have been approximated with fitting lines. The transmitted power increases for increasing free-wheeling angles at a constant turn-on angle \(\theta _{\textrm{on}}\), as more energy is stored in the coil during magnetization. For the turn-on angles \(\theta _{\textrm{on}}\) from 100° el. to \(150^\circ \,{\hbox{el.}}\) the curves are coincident but shifted to the right by the difference in the turn-on angle \(\theta _{\textrm{on}}\). They cover similar output power ranges. For turn-on angles \(\theta _{\textrm{on}}\) from 160° el. to \(180^\circ \,{\hbox{el.}}\), the achievable output power range rises to a maximum of 57 kW. The power range depends on the selection of the turn-on angle θon, so the turn-on angle is selected by the demanded output power P∗dc−link from Fig. 6 (d). This selection needs to be optimized. Further, the freewheeling angle θfree matching the demanded output power P∗dc−link is extracted from the same figure. With the selected turn-on and freewheeling angle, the turn-off angle can be determined from Fig. 6 (b), which shows the control angles θfree versus θoff for different θon, and the output power Pdc-link. So, a mapping from demanded output power P∗dc−link to the control angles is possible.
Another important parameter is the torque ripple \(T_{\textrm{ripple}}\) shown in Fig. 6 (c) as a function of the turn-off angle \(\theta _{\textrm{off}}\). The torque ripple is calculated by
The torque ripple does not show a linear behavior. The ripple increases for smaller turn-off angles \(\theta _{\textrm{off}}\) and decreases for larger ones. For all turn-on angles \(\theta _{\textrm{on}}\), the maximum torque ripple occurs at a turn-off angle \(\theta _{\textrm{off}}\) of \(295^\circ \,\hbox{el.}\). Larger turn-on angles \(\theta _{\textrm{on}}\) result in higher torque ripple Tripple so that the waveforms are shifted upwards. For example, at a turn-on angle \(\theta _{\textrm{on}}\) of \(120^\circ \,\hbox{el.}\) the maximum ripple is Tripple = 1.9. However, at a turn-on angle \(\theta _{\textrm{on}}\) of \(160^\circ \,{\hbox{el.}}\) the torque ripple Tripple reaches already a value of 2.4. The relationship between the torque ripple and the output power is independent as can be seen from the coloring of the individual markers. Although the rms phase current exceeds the permitted limit for the continuous operation of the test machine, the output power of the proposed system is controllable at a fixed mechanical power. Therefore, additional investigations to reduce the rms currents are required so that current pulse shapes need to be optimized.
6 Measurement Results
The control parameters, which were determined by simulations, are verified on the test bench (Fig. 8). For this test setup, the ICE is emulated by the test bench’s load machine while the battery and the traction drive are replaced by two dc-dc converters. This allows feeding the power in a circle.

Test bench setup
The device under test (DUT) has the same parameters as the simulated machine. The machine data are listed in Table 2. The machine has an integrated gear with a ratio of 1:4.1 which increases the speed of the generator.
The SRG is powered by a full bridge inverter with silicon carbide (SiC) metal-oxide semiconductor field-effect transistors (MOSFETs) with two split dc-links. The MOSFET modules are rated at 350 A. Each dc-link consist of 12 film capacitors each with a capacitance of \(340\,\upmu {\hbox{F}}\). Each dc-link has a capacitance of \(4.08\,{\hbox{mF}}\) to avoid rapid changes in the dc-link and battery voltage.
6.1 Measurement Setup
For the acquisition of the mechanical data a torque shaft of type FLFM1iSDT2 from GIF (now Atesteo GmbH & Co KG) (Table 3) is used. The torque shaft is placed between the load machine and the integrated gear, so that the losses of the gear are included in the raw data of the measurement. The electrical quantities are measured with two power analyzers of the type LMG500 from ZES Zimmer, the first one for the dc-link and the second one for the phase voltages and currents. Based on the electrical period of phase one, the power analyzer calculates the average, rms, minimum and maximum voltages and currents. Furthermore, the reactive, apparent, and active power of each phase and dc-link are measured.
The voltages are directly measured by the internal voltage sensor of the power analyzer, whereas the currents are measured with external current sensors. The phase currents and the current of the dc-link are measured with 600 A sensors and the battery current is measured with an 400 A sensor. The characteristics of the used current sensors are shown in Table 4.
6.2 Measuring Method
As the mechanical losses are neglected in the simulations, the mechanical losses are removed from the measured torque before they are used for further calculations. This torque is introduced as electric torque \(T_{\textrm{el}}\) and is calculated with (15) whereas \(T_{\textrm{drag}}\) is the drag torque and \(T_{\textrm{meas}}\) is the measured torque of the torque shaft.
Due to the equation of the torque, the mechanical power is calculated with (16).
With this calculated mechanical power \(P_{\textrm{mech}}\), the measuring points are selected in a band around the simulated points. The free-wheeling and turn-off angle are increased in \({2}^\circ \,{\hbox{el.}}\) steps. Subsequently, the OPs with a mechanical power of the nominal mechanical power (20 kW) with a deviation of \({\pm 200}\,{\hbox{W}}\) are selected.
6.3 Measuring Results
In this section, the measurement results are presented and discussed. At first, the control angles for the normal mode are verified. Figure 9 shows the locus curves for the turn-on angles of \({100}^\circ \,{\hbox{el.}}\), \({140}^\circ \,{\hbox{el.}}\) and \({180}^\circ \,{\hbox{el.}}\). The bottom right area represents invalid control angles because the free-wheeling angle θfree may not exceed the turn-off angle θoff. However, nominal OPs do not exist for a turn-on angle \(\theta _{\textrm{on}}\) of \({180}^\circ \,{\hbox{el.}}\). Comparing the measured and simulated locus curves for the turn-on angle \(\theta _{\textrm{on}}\) of \({100}^\circ \,{\hbox{el.}}\) and \({140}^\circ \,{\hbox{el.}}\), the measured curve is shifted to smaller turn-off angles and rescaled in the theta-off axis. Furthermore, Fig. 10 shows the free-wheeling angle θfree versus the output power \(P_{\mathrm{dc-link}}\). The output power range is defined as the difference of the maximum and minimum output power for a specific turn-on angle θon for operation at nominal mechanical power. The reached output power range of the measurements for the turn-on angle θon of \({100}^\circ \,\hbox{el.}\) is 22.7% higher than for the simulated OPs while the obtained output power range increases for the turn-on angle θon of \(140^\circ \,\hbox{el.}\) by 12.3%. The maximum output power for the two measured turn-on angles shows an increase of 1.31 kW and 2.14 kW with respect to the simulated results. The gradient from the free-wheeling angle θfree versus the output power increases for the measured curves.

Measurement in normal mode \(\theta _{\textrm{free}}\) vs. \(\theta _{\textrm{off}}\)

Measurement in normal mode \(\theta _{\textrm{free}}\) vs. \(\theta _{\textrm{off}}\)
To sum up, the measurement results validate the simulated control parameters, but the control angle locus curves defer slightly. However, the provided output power range is higher in the measurements as previously predicted in the simulations which is beneficial for the later operation of the topology.
7 Conclusions
This paper presents a control parameter analysis of the inverter topology presented in [3]. First, the energy transfer between the battery and the dc-link is described analytically. This includes an explanation of how the controllability of the output power is achieved.
Based on simulations in MATLAB/Simulink, the influence of the control variables turn-on, freewheeling and turn-off angles on the output power has been exemplarily discussed for a battery voltage of 400 V and a dc-link voltage of 600 V. The normal mode covers an output power from 22.8 to 57 kW respectively for a constant mechanical power of 20 kW. Since the average total torque is distributed equally among the phases, the control angles can be selected individually for each phase. A study on the operation of the SRM with different control angles per phase is planned for the future.
For the normal mode, the simulation has been verified successfully with measurements on the test bench. Especially the covered output power range is slightly higher in the measurements than in the simulations in this mode.
The analysis has pointed out that the rms phase currents do not allow continuous operation of the test machine. The high rms phase current results from the shape of the current pulses in the single-pulse operation. An optimization of this current-pulse shape or an optimized machine design can lead to a solution for the problem. The test machine has not been optimized for the application from [3].
In this paper, the controllability of the topology from [3] has been demonstrated. Some challenges, such as the current capability of the phases, need to be considered more closely. Also, the combination of individual control angles for each phase is a further research topic.
References
Hayes JG, Goodarzi GA (2017) Electric powertrain: energy systems, power electronics and drives for hybrid, electric and fuel cell vehicles, 1st edn. Wiley, New York. https://doi.org/10.1002/9781119063681
Schoenen T, Kunter MS, Hennen MD, De Doncker RW (2010) Advantages of a variable dc-link voltage by using a dc–dc converter in hybrid-electric vehicles. In: 2010 IEEE vehicle power and propulsion conference, Lille, France, pp 1–5. https://doi.org/10.1109/VPPC.2010.5729003
Götz GT, Pham D, De Doncker RW (2020) Inverter topology for range-extender units based on switched reluctance generators with integrated dc–dc converter. In: 2020 23rd international conference on electrical machines and systems (ICEMS), Hamamatsu, Japan, ISSN: 2642-5513, pp 1292–1297. https://doi.org/10.23919/ICEMS50442.2020.9291050
Miller TJE (2001) Electronic control of switched reluctance machines. Newnes, Oxford Boston. https://doi.org/10.1016/B978-0-7506-5073-1.X5000-7
Inderka R, De Doncker RW (2003) High-dynamic direct average torque control for switched reluctance drives. In: IEEE Trans Ind Appl 39(4):1040–1045. https://doi.org/10.1109/TIA.2003.814579
De Doncker RW, Pulle DWJ, Veltman A, Advanced electrical drives: analysis, modeling, control (power systems). Springer (2011). https://doi.org/10.1007/978-94-007-0181-6
Burkhart B (2018) Switched reluctance generator for range extender applications: design, control and evaluation. English, Ph.D. Dissertation, ISEA, Aachen. https://doi.org/10.18154/RWTH-2019-00025
Burkhart B, Klein-Hessling A, Hafeez SA, De Doncker RW (2016) Influence of freewheeling on single pulse operation of a switched reluctance generator. In: 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 2016, pp 1–6
Klein-Hessling A, Burkhart B, Scharfenstein D, De Doncker RW (2014) The effect of excitation angles in single-pulse controlled switched reluctance machines on acoustics and efficiency. In: 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, pp 2661–2666. https://doi.org/10.1109/ICEMS.2014.7013950
Mese E, Sozer Y, Kokernak JM, Torrey DA (2000) Optimal excitation of a high speed switched reluctance generator. In: APEC 2000. Fifteenth Annual IEEE applied power electronics conference and exposition (Cat. No.00CH37058) 1:362– 368. https://doi.org/10.1109/APEC.2000.826128
Pham D, Pugazhenthi LV, Götz GT, De Doncker RW (2020) Optimization of single pulse control based on design of experiments for switched reluctance machines. In: 2020 23rd international conference on electrical machines and systems (ICEMS), Hamamatsu, Japan, ISSN:2642-5513, pp 766–771. https://doi.org/10.23919/ICEMS50442.2020.9290923
Fuengwarodsakul N, De Doncker RW, Inderka R (2003) Simulation model of a switched reluctance drive in 42 V application. In: IECON’03. 29th annual conference of the IEEE industrial electronics society (IEEE Cat. No.03CH37468) vol 3, 2871–2876. https://doi.org/10.1109/IECON.2003.1280703
Acknowledgements
Funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation)—GRK 1856.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Götz, G.T., Kolbe, J., von Hoegen, A. et al. Control Parameter Analysis for an SRM Inverter for Range Extender Units with Integrated DC–DC Converter. J. Electr. Eng. Technol. 18, 1883–1892 (2023). https://doi.org/10.1007/s42835-022-01349-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-022-01349-z