
Abstract
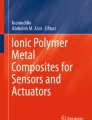
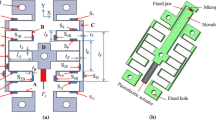
Ionic Polymer Metal Composite (IPMC) exhibits artificial muscle behavior while subjected to change in voltage, frequency and doping solutions. Here, an attempt has been made to actuate a miniscule compliant gripper by a pair of IPMC strips. To obtain substantial displacement and force to actuate the compliant gripper, a full factorial experimental layout was laid by considering three levels of voltage (1.5 V-3 V-4.5 V), frequencies (0.1 Hz-0.01 Hz-0.001 Hz) and doping solutions (KCl, NaCl and Distilled Water). Grey Relational Analysis was adopted to turn multi-objectives (force and displacement) into a single objective and the best parametric combination was found as ds-1-f+1-v+1 [KCl 1.5 (N)-0.001 Hz-4.5 V]. Response Surface Modeling (RSM) and ANOVA was adopted to correlate the force and displacement in terms of the process parameters (Voltage and Frequency). At the optimized parametric condition, IPMC strips provided actuating force and displacement of 4.8 mN and 3.24 mm respectively. A small compliant two-jaw gripper was modeled in CATIA V5-R20 and through ANSYS 14.0, it was observed that, at 1.5 mm gripper thickness, each jaw-tip flexed by 1.56 mm. Afterwards, the gripper was fabricated with PDMS material and IMPCs were able to flex each jaw by 0.87 mm. The gripper was observed to grip objects with maximum of 1.247 gms of weight.
Similar content being viewed by others

References
Bhandari, B., Lee, G.-Y., and Ahn, S.-H., “A Review on IPMC Material as Actuators and Sensors: Fabrications, Characteristics and Applications,” Int. J. Precis. Eng. Manuf., Vol. 13, No. 1, pp. 141–163, 2012.
Biswal, D. K., Bandopadhya, D., and Dwivedy, S. K., “Preparation and Experimental Investigation of Thermo-Electro-Mechanical Behavior of Ag-IPMC Actuator,” Int. J. Precis. Eng. Manuf., Vol. 13, No. 5, pp. 777–782, 2012.
Shahinpoor, M. and Kim, K. J., “Ionic Polymer-Metal Composites: I. Fundamentals,” Smart Materials and Structures, Vol. 10, No. 4, pp. 819–833, 2001.
Lughmani, W. A., Jho, J. Y., Lee, J. Y., and Rhee, K., “Modeling of Bending Behavior of IPMC Beams using Concentrated Ion Boundary Layer,” Int. J. Precis. Eng. Manuf., Vol. 10, No. 5, pp. 131–139, 2009.
Kim, H.-I., Kim, D.-K., and Han, J.-H., “Study of Flapping Actuator Modules using IPMC,” Proc. of SPIE 14th International Symposium on: Smart Structures and Materials & Nondestructive Evaluation and Health Monitoring, Vol. 6524, Paper No. 65241A, 2007.
He, Q., Yu, M., Song, L., Ding, H., Zhang, X., and Dai, Z., “Experimental Study and Model Analysis of the Performance of IPMC Membranes with Various Thickness,” Journal of Bionic Engineering, Vol. 8, No. 1, pp. 77–85, 2011.
Bhattacharya, S., Bepari, B., and Bhaumik, S., “IPMC-Actuated Compliant Mechanism-based Multifunctional Multifinger Microgripper,” Mechanics based Design of Structures and Machines, Vol. 42, No. 3, pp. 312–325, 2014.
Chen, Q., Xiong, K. Bian, K., Jin, N., and Wang, B., “Preparation and Performance of Soft Actuator based on IPMC with Silver Electrodes,” Frontiers of Mechanical Engineering in China, Vol. 4, No. 4, pp. 436–440, 2009.
Jiang, Y., Feng, Z.-h., and He, J., “Experimental Research on the IPMC Actuator’s Dynamic Characters,” Journal of Wuhan University of Technology, Vol. 29, No. 2, pp. 5–7, 2007.
Nemat-Nasser, S., Zamani, S., and Tor, Y., “Effect of Solvents on the Chemical and Physical Properties of Ionic Polymer-Metal Composites,” Journal of Applied Physics, Vol. 99, No. 10, Paper No. 104902, 2006.
Çilingir, H. D. and Papila, M., “Equivalent Electromechanical Coefficient for IPMC Actuator Design based on Equivalent Bimorph Beam Theory,” Experimental Mechanics, Vol. 50, No. 8, pp. 1157–1168, 2010.
Deng, J. L., “Control Problems of Grey Systems,” Systems & Control Letters, Vol. 1, No. 5, pp. 288–294, 1982.
Deng, J. L., “Introduction to Grey System Theory,” The Journal of Grey System, Vol. 1, No. 1, pp. 1–24, 1989.
Montgomery, D. C., “Design and Analysis of Experiments,” Wiley New York, pp. 427–500, 2009.
Wen, K.-L., Chang, T.-C., and You, M.-L., “The Grey Entropy and Its Application in Weighting Analysis,” Proc. of IEEE International Conference on Systems, Man, and Cybernetics, Vol. 2, pp. 1842–1844, 1998.
Maheswari, N., Reddy, A. N., Sahu, D. K., and Ananthasuresh, G., “Miniature Compliant Grippers with Force-Sensing,” Proc. of 14th National Conference on Machines and Mechanisms, pp. 431–439, 2009.
Khare, P., Madhab, G. B., Kumar, C. S., and Mishra, P. K., “Optimizing Design of Piezoelectric Actuated Compliant Microgripper Mechanism,” Proc. of 13th National Conference on Mechanisms and Machines, 2007.
Goldfarb, M. and Celanovic, N., “Modeling Piezoelectric Stack Actuators for Control of Micromanipulation,” IEEE Control Systems, Vol. 17, No. 3, pp. 69–79, 1997.
Fung, C.-P., “Manufacturing Process Optimization for Wear Property of Fiber-Reinforced Polybutylene Terephthalate Composites with Grey Relational Analysis,” Wear, Vol. 254, No. 3, pp. 298–306, 2003.
Abhang, L. and Hameedullah, M., “Determination of Optimum Parameters for Multi-Performance Characteristics in Turning by using Grey Relational Analysis,” The International Journal of Advanced Manufacturing Technology, Vol. 63, No. 1, pp. 13–24, 2012.
Ho, C.-Y. and Lin, Z.-C., “Analysis and Application of Grey Relation and ANOVA in Chemical-Mechanical Polishing Process Parameters,” The International Journal of Advanced Manufacturing Technology, Vol. 21, No. 1, pp. 10–14, 2003.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bhattacharya, S., Chattaraj, R., Das, M. et al. Simultaneous parametric optimization of IPMC actuator for compliant gripper. Int. J. Precis. Eng. Manuf. 16, 2289–2297 (2015). https://doi.org/10.1007/s12541-015-0294-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-015-0294-8