
Abstract
For pre- and post-earthquake remote-sensing images, registration is a challenging task due to the possible deformations of the objects to be registered. To overcome this problem, in a previous paper, we proposed a registration method based on robust weighted kernel principal component analysis (RWKPCA) to precisely register the variform objects. Which was proved very effective in capturing the common robust kernel principal components (RKPCs) and generalized well for registration. Compared with previous paper, there are two improvements in this paper: Firstly, we developed the improved RWKPCA method from the robust loss function, and theoretically proved the robustness of the method; Secondly, a new construction of weight function by projection residual was given, which enables the great reduction of computing time. Finally, two experiments were conducted on the remote-sensing image registration in Wenchuan earthquake and change detection of Tangjiashan barrier lake, and the results showed that compared with the previous method, the registration accuracy was increased while the computational time was decreased a lot. Meanwhile, good performance on the change detection of barrier lake is obtained.





Similar content being viewed by others

References
Alzate, C., & Suykens, J. A. K. (2008). Kernel component analysis using an epsilon-insensitive robust loss function. Neural Networks, 19, 1583–1598.
Caelli, T., & Kosinov, S. (2004). An Eigenspace projection clustering method for inexact graph matching. Pattern Analysis and Machine Intelligence IEEE Transactions on, 26, 515–519.
Dhillon, I. S., Yuqiang, G., & Kulis, B. (2007). Weighted graph cuts without eigenvectors a multilevel approach. IEEE Transactions on Pattern Analysis and Machine Intelligence, 29, 1944–1957.
Ding, M., Tian, Z., Jin, Z., Xu, M., & Cao, C. (2010). Registration using robust kernel principal component for object-based change detection. Geoscience and Remote Sensing Letters IEEE, 7, 761–765.
Duan, X. F., Tian, Z., Ding, M. T., & Zhao, W. (2013). Registration of remote-sensing images using robust weighted kernel principal component analysis. International Journal of Electronics and Communications, 67, 20–28.
Han, J., Pauwels, E. J., & Zeeuw, P. D. (2013). Visible and infrared image registration in man-made environments employing hybrid visual features. Pattern Recognition Letters, 34, 42–51.
He, R., Hu, B.-G., Zheng, W.-S., & Kong, X.-W. (2011). Robust principal component analysis based on maximum correntropy criterion. Image Processing IEEE Transaction on, 20, 1485–1494.
He, X. C. and Yung, N. H. C. (2004). “Curvature scale space corner detector with adaptive threshold and dynamic region of support.” In ICPR’04, 791–794.
Huang, S. Y., Yeh, Y. R., & Eguchi, S. (2009). Robust Kernel Principal Component Analysis. Neural Computation, 21, 3179–3213.
Huber, P. J. (2005). Robust statistics (pp. 47–48). New Jersey: Wiley.
Kaneko, S. I., Murase, I., & Igarashi, S. (2002). Robust Image Registration by Increment Sign Correlation. Pattern Recognition, 35, 2223–2234.
Li, Q. (2007). Steerable filter based multiscale registration method for Jers-1 Sar and Aster Images. Geoscience and Remote Sensing Symposium, IEEE Transactions on pp. 381–384.
Lu, C. D., Zhang, T. Y., Du, X. Z. and Li, C. P. (2004). “A Robust Kernel Pca Algorithm.” In ICMLC, 3084-3087. Shanghai, China.
Moigne, J. L., Netanyahu, N. S. & Eastman, R. D. (2011). Image Registration for Remote Sensing (pp. xii–xii). Cambridge: Cambridge University Press.
Pang, Y. W., & Wang, L. (2010). Generalized Kpca by adaptive rules in feature space. International Journal of Computer Mathematics, 87, 956–968.
Sahbi, H. (2007). Kernel Pca for similarity invariant shape recognition. Neurocomputing, 70, 3034–3045.
Salah, M. B., Mitiche, A., & Ayed, I. B. (2011). Multiregion image segmentation by parametric kernel graph cuts. Image ProcessingIEEE Transactions on, 20, 545–557.
Scholkopf, B., Mika, S., Burges, C. J., Knirsch, P., Muller, K.-R., Ratsch, G., & Smola, A. J. (1999). Input space versus feature space in kernel-based methods. Neural Networks, IEEE Transactions on, 10, 1000–1017.
Scholkopf, B., Smola, A., & Muller, K. R. (1998). Nonlinear component analysis as a kernel eigenvalue problem. Neural Computation, 10, 1299–1319.
Scott, G. L., & Longuet-Higgins, H. C. (1991). An algorithm for associating the features of two images. Proceedings of the Royal Society of London. Series B: Biological Sciences, 244, 21–26.
Shapiro, L. S., & Michael Brady, J. (1992). Feature-based correspondence: an eigenvector approach. Image and Vision Computing, 10, 283–288.
Shi, J., & Malik, J. (2000). Normalized cuts and image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22, 888–905.
Taylor, J. H., & Cristianini, N. (2004). Kernel methods for pattern analysis (pp. 148–150). Cambridge: Cambridge Press.
Wang, H. & Hancock, E. R. (2004). A kernel view of spectral point pattern matching. In Structural, Syntactic, and Statistical Pattern Recognition (Ed.), pp. 361–369 (Springer).
Yan, W., Tian, Z., Duan, X., & Pan, L. (2013). Feature matching based on unsupervised manifold alignment. Machine Vision and Applications, 24, 983–994.
Zhang, Z., Tian, Z., Ding, M., & Basu, A. (2013). Improved robust kernel subspace for object-based registration and change detection. Ieee Geoscience and Remote Sensing Letters, 10, 791–795.
Zitova, B., & Flusser, J. (2003). Image registration methods: a survey. Image and Vision Computing, 21, 977–1000.
Acknowledgment
This work was supported by the Natural Science Foundation of China (under Grant NO.61201323, NO.60972150 and NO.11426160), and Doctoral foundation of Taiyuan University of Science and Technology(NO.20142008, NO.20142009).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Proof of Proposition 1
Proof: Firstly, let ψ(x i ) = w i ϕ(x i ), i = 1, 2, ⋯ n, \( {\mathbf{C}}_{\mathbf{W}}=\frac{1}{n}{\displaystyle \sum_{i=1}^n\psi \left({\mathbf{x}}_i\right)\psi {\left({\mathbf{x}}_i\right)}^T}=\frac{1}{n}{\displaystyle \sum_{i=1}^n{w}_i^2\phi \left({\mathbf{x}}_i\right)\phi {\left({\mathbf{x}}_i\right)}^T} \), Ũ K is the space spanned by the first k eigenvectors of C W , then by Lemma 1 one can easily get that Ũ K dose solve the optimization problem
Substituting ψ(x i ) = w i ϕ(x i ) into (23), one proves that Ũ K dose solve the following optimization problem
Having equation (24) and to prove equation (23), one only need to prove that \( {{\displaystyle {\sum}_{i=1}^n\left\Vert {P}_{{\tilde{\mathbf{U}}}^{\perp }}\left({w}_i\phi \left({\mathbf{x}}_i\right)\right)\right\Vert}}_2^2={{\displaystyle {\sum}_{i=1}^n\left\Vert {w}_i{P}_{{\tilde{\mathbf{U}}}^{\perp }}\left(\phi \left({\mathbf{x}}_i\right)\right)\right\Vert}}_2^2 \). Using the definition of residual and Pythagoras’s theorem, one gets
Let Ũ = [ũ 1, ũ 2, ⋯ ũ k ], then one obtains
By equation (26) one can compute the projection of ϕ(x i ) on ũ t
Where ũ t is the t th component of Ũ. Combining equation (26) and (27), one gets
Substituting (28) into (25) leads to
Then \( {{\displaystyle {\sum}_{i=1}^n\left\Vert {P}_{{\tilde{\mathbf{U}}}^{\perp }}\left({w}_i\phi \left({\mathbf{x}}_i\right)\right)\right\Vert}}_2^2={{\displaystyle {\sum}_{i=1}^n\left\Vert {w}_i{P}_{{\tilde{\mathbf{U}}}^{\perp }}\left(\phi \left({\mathbf{x}}_i\right)\right)\right\Vert}}_2^2 \) was proved, so the proposition 1 was held.
Appendix 2: Proof of Proposition 2
Proof: Firstly, we prove the symmetry of K W . (K W )T = (WKW)T = W T K T W T = WKW = K W . Secondly, we prove K W is positive semi-definite. Assume the eigenvalues of K is λ i (1 ≤ i ≤ n), then the eigenvalues of K W is w 2 i λ i (1 ≤ i ≤ n), for K is positive semi-definite, all λ i (1 ≤ i ≤ n) are greater than or equal to zero, so all w 2 i λ i (1 ≤ i ≤ n) are also greater than or equal to zero, which proves that K W is positive semi-definite, so K W is also a mercer kernel.
Appendix 3

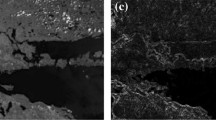
Original ALOS-PALSAR intensity images and their corresponding segmented ones of Shangyou reservoir. a Pre-earthquake image acquired on February 17, 2008; b The segmented image of (a); c Post-earthquake image acquired on May 19, 2008; d The segmented image of (c)

Original ALOS-PALSAR intensity images and their corresponding segmented ones of Baishuihe reservoir. a Pre-earthquake image acquired on February 17, 2008; b The segmented image of (a); c Post-earthquake image acquired on May 19, 2008; d The segmented image of (c)

The ALOS AVNIR-2 images of the study area. Both images are combined by band 3 (Red color), band 2 (Green color) and band 1 (Blue color). a The pre-earthquake image acquired on Mar. 31, 2007; b The post-earthquake image acquired on May 16, 2008
About this article

Cite this article
Duan, X., Qi, P. & Tian, Z. Registration for Variform Object of Remote-Sensing Image Using Improved Robust Weighted Kernel Principal Component Analysis. J Indian Soc Remote Sens 44, 675–686 (2016). https://doi.org/10.1007/s12524-015-0545-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12524-015-0545-2