
Abstract
Purpose
We present the evaluation of the reproducibility of measurements performed using robotic ultrasound imaging in comparison with expert-operated sonography. Robotic imaging for interventional procedures may be a valuable contribution, but requires reproducibility for its acceptance in clinical routine. We study this by comparing repeated measurements based on robotic and expert-operated ultrasound imaging.
Methods
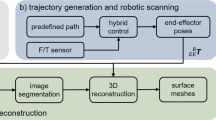
Robotic ultrasound acquisition is performed in three steps under user guidance: First, the patient is observed using a 3D camera on the robot end effector, and the user selects the region of interest. This allows for automatic planning of the robot trajectory. Next, the robot executes a sweeping motion following the planned trajectory, during which the ultrasound images and tracking data are recorded. As the robot is compliant, deviations from the path are possible, for instance due to patient motion. Finally, the ultrasound slices are compounded to create a volume. Repeated acquisitions can be performed automatically by comparing the previous and current patient surface.
Results
After repeated image acquisitions, the measurements based on acquisitions performed by the robotic system and expert are compared. Within our case series, the expert measured the anterior–posterior, longitudinal, transversal lengths of both of the left and right thyroid lobes on each of the 4 healthy volunteers 3 times, providing 72 measurements. Subsequently, the same procedure was performed using the robotic system resulting in a cumulative total of 144 clinically relevant measurements. Our results clearly indicated that robotic ultrasound enables more repeatable measurements.
Conclusions
A robotic ultrasound platform leads to more reproducible data, which is of crucial importance for planning and executing interventions.







Similar content being viewed by others


Change history
20 August 2019
The original version of this article unfortunately contained a mistake.
20 August 2019
The original version of this article unfortunately contained a mistake.
References
Graumann C, Fuerst B, Hennersperger C, Bork F, Navab N (2016) Robotic ultrasound trajectory planning for volume of interest coverage. In: IEEE international conference on robotics and automation (ICRA)
Zettinig O, Fuerst B, Kojcev R, Esposito M, Salehi M, Wein W, Rackerseder J, Sinibaldi E, Frisch B, Navab N (2016) Toward real-time 3D ultrasound registration-based visual servoing for interventional navigation. In: IEEE international conference on robotics and automation (ICRA)
Kojcev R, Fuerst B, Zettinig O, Fotouhi J, Lee SC, Frisch B, Taylor R, Sinibaldi E, Navab N (2016) Dual-robot ultrasound-guided needle placement: closing the planning-imaging-action loop. Int J Comput Assist Radiol Surg 11(6):1173–1181
Conti F, Park J, Khatib O (2014) Interface design and control strategies for a robot assisted ultrasonic examination system. In: Khatib O, Kumar V, Sukhatme G (eds) Experimental robotics: the 12th international symposium on experimental robotics. Springer Berlin Heidelberg, pp 97–113. ISBN 978-3-642-28572-1
Hennersperger C, Fuerst B, Virga S, Zettinig O, Frisch B, Neff T, Navab N (2017) Towards MRI-based autonomous robotic US acquisitions: a first feasibility study. IEEE Trans Med Imaging 36(2):538–548
Cooper DS, Doherty GM, Haugen BR, Kloos RT, Lee SL, Mandel SJ, Mazzaferri EL, McIver B, Pacini F, Schlumberger M, Sherman SI, Steward DL, Tuttle RM (2009) Revised American thyroid association management guidelines for patients with thyroid nodules and differentiated thyroid cancer: the American thyroid association (ATA) guidelines taskforce on thyroid nodules and differentiated thyroid cancer. Thyroid 19(11):1167–1214
Vinayak S, Sande JA (2012) Avoiding unnecessary fine-needle aspiration cytology by accurately predicting the benign nature of thyroid nodules using ultrasound. J Clin Imaging Sci 2(1):23
Yue W, Wang S, Wang B, Xu Q, Yu S, Yonglin Z, Wang X (2013) Ultrasound guided percutaneous microwave ablation of benign thyroid nodules: safety and imaging follow-up in 222 patients. Eur J Radiol 82(1):e11–e16
Fakhry C, Agrawal N, Califano J, Messing B, Liu J, Saunders J, Ha P, Coquia S, Hamper U, Gillison M, Blancoa R (2014) The use of ultrasound in the search for the primary site of unknown primary head and neck squamous cell cancers. Oral Oncol 50(7):640–645
Blanco RGF, Califano J, Messing B, Richmon J, Liu J, Quon H, Neuner G, Saunders J, Ha PK, Sheth S, Gillison M, Fakhry C (2014) Transcervical ultrasonography is feasible to visualize and evaluate base of tongue cancers. PLoS ONE 9(1):e87565
Gilbertson MW (2014) Electromechanical systems to enhance the usability and diagnostic capabilities of ultrasound imaging. Ph.D. dissertation, Massachusetts Institute of Technology
Zhang Z (2000) A flexible new technique for camera calibration. IEEE Trans Pattern Anal Mach Intell 22(11):1330–1334
Shiu YC, Ahmad S (1989) Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX = XB. IEEE Trans Robot Autom 5(1):16–29
Mercier L, Langø T, Lindseth F, Collins LD (2005) A review of calibration techniques for freehand 3-d ultrasound systems. Ultrasound Med Biol 31(2):143–165
Brown DC (1966) Decentering distortion of lenses. Photom Eng 32(3):444–462
Rusu RB, Marton ZC, Blodow N, Dolha M, Beetz M (2008) Towards 3D point cloud based object maps for household environments. Robot Auton Syst 56(11):927–941
Karamalis A, Wein W, Kutter O, Navab N (2009) Fast hybrid freehand ultrasound volume reconstruction. In: SPIE medical imaging. International society for optics and photonics, p 726114
Albu-Schäffer A, Ott C, Frese U, Hirzinger G (2003) Cartesian impedance control of redundant robots: recent results with the DLR-Light-Weight-arms. In: International conference on robotics and automation, Proceedings, vol 3. IEEE, p 3704–3709
Schreiber G, Stemmer A, Bischoff R (2010) The fast research interface for the KUKA lightweight robot. In: IEEE workshop on innovative robot control architectures for demanding applications how to modify and enhance commercial controllers
Bischoff R, Kurth J, Schreiber G, Koeppe R, Albu-Schaeffer A, Beyer A, Eiberger O, Haddadin S, Stemmer A, Grunwald G, Hirzinger G (2010) The kuka-dlr lightweight robot arm-a new reference platform for robotics research and manufacturing. In: Robotics (ISR), 2010 41st international symposium on and 2010 6th German conference on robotics (ROBOTIK), June 2010, p 1–8
Lasso A, Heffter T, Rankin A, Pinter C, Ungi T, Fichtinger G (2014) Plus: open-source toolkit for ultrasound-guided intervention systems. IEEE Trans Biomed Eng 10:2527–2537
Tokuda J, Fischer GS, Papademetris X, Yaniv Z, Ibanez L, Cheng P, Liu H, Blevins J, Arata J, Golby AJ, Kapur T, Pieper S, Burdette EC, Fichtinger G, Tempany CM, Hata N (2009) OpenIGTLink: an open network protocol for image-guided therapy environment. Int J Med Robot Comput Assist Surg 5(4):423–434
Acknowledgements
The authors wish to thank Wolfgang Wein and his team (ImFusion GmbH, Munich, Germany) for their support and opportunity to use the ImFusion framework.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does contain a study with human participants and was approved by the JHU Homewood Institutional Review Board under the number HIRB00004673. All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
R. Kojcev and A. Khakzar have contributed equally and should be considered joint first authors.
Rights and permissions
About this article

Cite this article
Kojcev, R., Khakzar, A., Fuerst, B. et al. On the reproducibility of expert-operated and robotic ultrasound acquisitions. Int J CARS 12, 1003–1011 (2017). https://doi.org/10.1007/s11548-017-1561-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-017-1561-1