
Abstract
The level set methodology for time-optimal path planning is employed to predict collision-free and fastest-time trajectories for swarms of underwater vehicles deployed in the Philippine Archipelago region. To simulate the multiscale ocean flows in this complex region, a data-assimilative primitive-equation ocean modeling system is employed with telescoping domains that are interconnected by implicit two-way nesting. These data-driven multiresolution simulations provide a realistic flow environment, including variable large-scale currents, strong jets, eddies, wind-driven currents, and tides. The properties and capabilities of the rigorous level set methodology are illustrated and assessed quantitatively for several vehicle types and mission scenarios. Feasibility studies of all-to-all broadcast missions, leading to minimal time transmission between source and receiver locations, are performed using a large number of vehicles. The results with gliders and faster propelled vehicles are compared. Reachability studies, i.e., determining the boundaries of regions that can be reached by vehicles for exploratory missions, are then exemplified and analyzed. Finally, the methodology is used to determine the optimal strategies for fastest-time pick up of deployed gliders by means of underway surface vessels or stationary platforms. The results highlight the complex effects of multiscale flows on the optimal paths, the need to utilize the ocean environment for more efficient autonomous missions, and the benefits of including ocean forecasts in the planning of time-optimal paths.











Similar content being viewed by others

References
Adalsteinsson D, Sethian JA (1995) A fast level set method for propagating interfaces. J Comput Phys 118(2):269–277
Agarwal A, Lermusiaux PFJ (2011) Statistical field estimation for complex coastal regions and archipelagos. Ocean Model 40(2):164–189. doi:10.1016/j.ocemod.2011.08.001
Beṡiktepe ṠT, Lermusiaux PFJ, Robinson AR (2003) Coupled physical and biogeochemical data-driven simulations of Massachusetts Bay in late summer: real-time and postcruise data assimilation. J Mar Syst 40–41:171–212
Bleck R (2002) An oceanic general circulation model framed in hybrid isopycnic-cartesian coordinates. Ocean Model 4(1):55–88
Choi HL, How JP (2010) Continuous trajectory planning of mobile sensors for informative forecasting. Automatica 46(8):1266–1275
Colin MEGD, Duda TF, te Raa LA, van Zon T, Haley PJ, Lermusiaux PFJ, Leslie WG, Mirabito C, Lam FPA, Newhall AE, Lin YT, Lynch JF (2013) Time-evolving acoustic propagation modeling in a complex ocean environment. In: OCEANS - Bergen, 2013 MTS/IEEE, pp 1–9
Cossarini G, Lermusiaux PFJ, Solidoro C (2009) The lagoon of Venice ecosystem: seasonal dynamics and environmental guidance with uncertainty analyses and error subspace data assimilation. J Geophys Res 114:C0626
Egbert GD, Erofeeva SY (2002) Efficient inverse modeling of barotropic ocean tides. J Atmos Ocean Technol 19(2):183–204
Gangopadhyay A, Lermusiaux PFJ, Rosenfeld L, Robinson AR, Calado L, Kim HS, Leslie WG, Haley PJ Jr (2011) The California Current System: a multiscale overview and the development of a feature-oriented regional modeling system (FORMS). Dynam Atmos Oceans 52(1–2):131–169. Special issue of Dynamics of Atmospheres and Oceans in honor of Prof. A. R. Robinson doi:10.1016/j.dynatmoce.2011.04.003
Gordon AL, Villanoy CL (2011) Oceanography. Special issue on the Philippine Straits Dynamics Experiment, vol 24. The Oceanography Society
Gordon AL, Sprintall J, Ffield A (2011) Regional oceanography of the Philippine Archipelago. Oceanography 24(1):15–27
Haley PJ Jr, Lermusiaux PFJ (2010) Multiscale two-way embedding schemes for free-surface primitive equations in the multidisciplinary simulation, estimation and assimilation system. Ocean Dyn 60(6):1497–1537. doi:10.1007/s10236-010-0349-4
Haley PJ Jr, Lermusiaux PFJ, Robinson AR, Leslie WG, Logoutov O, Cossarini G, Liang XS, Moreno P, Ramp SR, Doyle JD, Bellingham J, Chavez F, Johnston S (2009) Forecasting and reanalysis in the Monterey Bay/California Current region for the Autonomous Ocean Sampling Network-II experiment. Deep Sea Research II 56(3–5):127–148. doi:10.1016/j.dsr2.2008.08.010
Haley P J Jr, Agarwal A, Lermusiaux P F J (2014) Optimizing velocities and transports for complex coastal regions and archipelagos. Ocean Modelling sub-judice
Hodur RM (1997) The naval research laboratory’s Coupled Ocean/Atmosphere Mesoscale Prediction System (COAMPS). Mon Weather Rev 125(7):1414–1430
Hsieh MA, Forgoston E, Mather TW, Schwartz IB (2012) Robotic manifold tracking of coherent structures in flows. In: Robotics and automation (ICRA), 2012 IEEE International Conference on, pp 4242–4247
Hurlburt HE, Metzger EJ, Sprintall J, Riedlinger SN, Arnone RA, Shinoda T, Xu X (2011) Circulation in the Philippine Archipelago simulated by 1/12 ∘ and 1/25 ∘ global HYCOM and EAS NCOM. Oceanography 24(1):28–47
Inanc T, Shadden SC, Marsden JE (2005) Optimal trajectory generation in ocean flows. In: American Control Conference, 2005. Proceedings of the 2005, pp 674–679
Leben RR, Born GH, Engebreth BR (2002) Operational altimeter data processing for mesoscale monitoring. Mar Geodesy 25(1-2):3–18
Lermusiaux PFJ (2006) Uncertainty estimation and prediction for interdisciplinary ocean dynamics. J Comput Phys 217:176–199
Lermusiaux PFJ (2007) Adaptive modeling, adaptive data assimilation and adaptive sampling. Physica D Nonlinear Phenomena 230:172–196
Lermusiaux PFJ, Chiu CS, Gawarkiewicz GG, Abbot P, Robinson AR, Miller RN, Haley PJ, Leslie WG, Majumdar SJ, Pang A, Lekien F (2006) Quantifying uncertainties in ocean predictions. Oceanography 19(1):90–103
Lermusiaux PFJ, Haley PJ Jr, Yilmaz NK (2007) Environmental prediction, path planning and adaptive sampling-sensing and modeling for efficient ocean monitoring, management and pollution control. Sea Technol 48(9):35–38
Lermusiaux PFJ, Haley PJ, Leslie WG, Agarwal A, Logutov O, Burton L (2011) Multiscale physical and biological dynamics in the Philippine Archipelago: predictions and processes. Oceanography 24(1):70–89. doi:10.5670/oceanog.2011.05
Lermusiaux PFJ, Lolla T, Haley PJ Jr, Yigit K, Ueckermann MP, Sondergaard T, Leslie WG (2014) Science of autonomy: time-optimal path planning and adaptive sampling for swarms of ocean vehicles. Chapter 11, Springer Handbook of Ocean Engineering: Autonomous Ocean Vehicles, Subsystems and Control, Tom Curtin (Ed.), in press.
Leslie WG, Robinson AR, Haley PJ, Logoutov O, Moreno P, Lermusiaux PFJ, Coehlo E (2008) Verification and training of real-time forecasting of multi-scale ocean dynamics for maritime rapid environmental assessment. J Mar Syst 69(1–2):3–16
Logutov OG, Lermusiaux PFJ (2008) Inverse barotropic tidal estimation for regional ocean applications. Ocean Model 25(1–2):17–34
Lolla T (2012) Path planning in time dependent flows using level set methods. Master’s thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology
Lolla T, Ueckermann MP, Yigit K, Haley PJ, Lermusiaux PFJ (2012) Path planning in time dependent flow fields using level set methods. In: Proceedings of IEEE international conference on robotics and automation, pp 166–173
Lolla T, Lermusiaux PFJ, Ueckermann MP, Haley Jr PJ (2014) Timeoptimal path planning in dynamic flows using level set equations: theory and schemes. Ocean Dyn. doi:10.1007/s10236-014-0757-y
Mannarini G, Coppini G, Oddo P, Pinardi N (2013) A prototype of ship routing decision support system for an operational oceanographic service. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation 7(1):53–59. doi:10.12716/1001.07.01.06
Michini M, Hsieh MA, Forgoston E, Schwartz IB (2014) Robotic tracking of coherent structures in flows. IEEE Trans Robot 30(3):593–603. doi:10.1109/TRO.2013.2295655
MSEAS Group (2010) Multidisciplinary Simulation, Estimation, and Assimilation Systems (http://mseas.mit.edu/, http://mseas.mit.edu/codes), Manual. MSEAS Report 6, MIT, Cambridge, MA, USA
Onken R, Álvarez A, Fernández V, Vizoso G, Basterretxea G, Tintoré J, Haley P Jr, Nacini E (2008) A forecast experiment in the Balearic Sea. J Mar Syst 71(1–2):79–98
Osher S, Fedkiw R (2003) Level set methods and dynamic implicit surfaces. Springer Verlag
Paley DA, Zhang F, Leonard NE (2008) Cooperative control for ocean sampling: the glider coordinated control system. IEEE Trans Control Syst Technol 16(4):735–744
Qu T, Lukas R (2003) The fifurcation of the north equatorial current in the Pacific. J Phys Oceanogr 33(1):5–18
Ramp SR, Lermusiaux PFJ, Shulman I, Chao Y, Wolf RE, Bahr FL (2011) Oceanographic and atmospheric conditions on the continental shelf north of the Monterey Bay during August 2006. Dynam Atmos Oceans 52(1–2):192–223
Robinson AR, Lermusiaux PFJ, Sloan III NQ (1998) Data assimilation. The sea: the global coastal ocean. In: Brink I, K. H., Robinson A. R. (eds), vol 10. John Wiley and Sons, New York , pp 541–594
Sethian JA (1999) Level set methods and fast marching methods: evolving interfaces in computational geometry, fluid mechanics, computer vision, and materials science. UK, Cambridge
Sondergaard T, Lermusiaux PFJ (2013) Data assimilation with Gaussian mixture models using the dynamically orthogonal field equations. Part I: theory and scheme. Mon Weather Rev 141(6):1737–1760
Ueckermann MP, Lermusiaux PFJ, Sapsis TP (2013) Numerical schemes for dynamically orthogonal equations of stochastic fluid and ocean flows. J Comput Phys 233(0):272–294
Xu J, Lermusiaux PFJ, Haley PJ, Leslie WG, Logoutov OG (2008) Spatial and temporal variations in acoustic propagation during the PLUSNet07 exercise in dabob bay. In: Proceedings of meetings on acoustics (POMA), 155th Meeting Acoustical Society of America 4:070, pp 001
Yilmaz NK, Evangelinos C, Patrikalakis NM, Lermusiaux PFJ, Haley PJ, Leslie WG, Robinson AR, Wang D, Schmidt H (2006) Path planning methods for adaptive sampling of environmental and acoustical ocean fields. In: OCEANS 2006, pp 1–6. doi:10.1109/OCEANS.2006.306841
Yilmaz NK, Evangelinos C, Lermusiaux PFJ, Patrikalakis NM (2008) Path planning of autonomous underwater vehicles for adaptive sampling using mixed integer linear programming. Oceanic Engineering. IEEE Journal of 33(4):522–537. doi:10.1109/JOE.2008.2002105
Acknowledgments
We acknowledge the Office of Naval Research for supporting this research under grants N00014-09-1-0676 (Science of Autonomy A-MISSION), N00014-07-1-0473 (PhilEx), N00014-12-1-0944 (ONR6.2), and N00014-13-1-0518 (Multi-DA) to the Massachusetts Institute of Technology (MIT). We are grateful to our MSEAS group at MIT for discussions. We also thank the two anonymous reviewers for their useful comments.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Responsible Editor: Jörg-Olaf Wolff
Appendix: Level set methodology for path planning
Appendix: Level set methodology for path planning
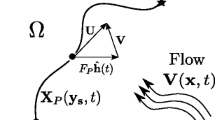
In this section, we briefly review the methodology and algorithm for time-optimal path planning used in this paper. The method has its roots in Lolla et al. (2012) and Lolla (2012). A formal proof and detailed algorithm are provided in the companion paper (Lolla et al. 2014). Let \({\Omega } \subseteq \mathbb {R}^{2}\) be an open set and let F>0. Suppose a vehicle (denoted by P) moves in Ω under the influence of a bounded, Lipschitz continuous dynamic flow field \(\mathbf {V}(\mathbf {x},t):{\Omega } \times [0,\infty ) \rightarrow \mathbb {R}^{2}\). Let its start point and end point be y s and y f respectively, with y s ,y f ∈Ω. The vehicle’s trajectory, denoted by X P (y s ,t) follows the kinematic relation
where F P (t)∈[0,F] is the nominal speed of the vehicle relative to the flow and \(\hat {\mathbf {h}}(t)\) is the unit vector in the steering (heading) direction. The limiting conditions on X P (y s ,t) are
where \(\widetilde {T}(\mathbf {y}): {\Omega } \rightarrow \mathbb {R}\) is the first “arrival time” at point y, i.e., the first time P reaches y. In this paper, it is assumed that V(x,t) is completely known. This may correspond to the mean or the mode of the forecast flow field given by an ocean modeling system (Lermusiaux et al. 2006; Haley and Lermusiaux 2010; Ueckermann et al. 2013). Furthermore, a kinematic model (1) for the interaction between the flow and the vehicle is assumed to be adequate. This assumption is reasonable for sufficiently long distance underwater path planning. In addition, the notation |∙| denotes the l–2 norm of ∙. F P (t) and \(\hat {\mathbf {h}}(t)\) together constitute the (isotropic) controls of the vehicle. For a general end point y∈Ω, let \(F_{P}^{o}(t)\) and \(\hat {\mathbf {h}}^{o}(t)\) be the corresponding optimal controls, i.e., controls that minimize \(\widetilde {T}(\mathbf {y})\) subject to the constraints (1)–(2). Let this minimum arrival time be denoted by T o(y), and the resultant optimal trajectory be \(\mathbf {X}^{o}_{P}(\mathbf {y}_{s},t)\). For the specific end point y f ∈Ω, the superscript “ o” on quantities specific to the optimal trajectory is replaced by “ ⋆”.
1.1 A.1 Methodology
The path planning methodology described in Lolla et al. (2012) and (2014) involves computing the reachable set from a given starting point. The reachable set at any time t≥0, denoted by \(\mathcal {R}(\mathbf {y}_{s},t)\), is defined as the set of all points y∈Ω for which there exist controls F P (τ) and \(\hat {\mathbf {h}}(\tau )\) for 0≤τ≤t and a resultant trajectory \(\widetilde {\mathbf {X}}_{P}(\mathbf {y}_{s},\tau )\) satisfying Eq. 1 such that \(\widetilde {\mathbf {X}}_{P}(\mathbf {y}_{s},t) = \mathbf {y}\). Hence, \(\mathcal {R}(\mathbf {y}_{s},t)\) includes only those points which can be visited by the vehicle at time t. The boundary of the reachable set is called the reachability front and is denoted by \(\partial \mathcal {R}(\mathbf {y}_{s},t)\). As a result, for any y∈Ω, T o(y) is the first time the reachability front \(\partial \mathcal {R}(\mathbf {y}_{s},t)\) reaches y.
We showed in Lolla et al. (2014) that the reachable set \(\mathcal {R}(\mathbf {y}_{s},t)\) is related to \(\phi ^{o}:{\Omega } \times [0,\infty ) \rightarrow \mathbb {R}\), the viscosity solution of the Hamilton–Jacobi equation. Specifically, at any given time t≥0,
Equation 3 implies that the zero level set of ϕ o coincides with the reachability front \(\partial \mathcal {R}(\mathbf {y}_{s},t)\) for any t≥0. This relationship between reachability and level sets of ϕ o enables an implicit computation of \(\mathcal {R}(\mathbf {y}_{s},t)\) by numerically solving Eqs. 6–7.
In addition to the optimal arrival time T o(y), ϕ o also yields the optimal controls \(F_{P}^{o}(t)\), \(\hat {\mathbf {h}}^{o}(t)\) and trajectory \(\mathbf {X}^{o}_{P}(\mathbf {y}_{s},t)\) leading to y. We showed in Lolla et al. (2014) that \(\phi ^{o}(\mathbf {X}^{o}_{P}(\mathbf {y}_{s},t),t) = 0\) for all 0≤t≤T o(y), i.e., vehicles on optimal trajectories always remain on the zero level set of ϕ o. The optimal controls, for 0<t<T o(y) are
whenever all the terms are well defined. Equivalently, if ϕ o is differentiable at \((\mathbf {X}^{o}_{P}(\mathbf {y}_{s},t),t)\) for some t∈(0,T o(y)), then,
i.e., the optimal steering direction is normal to level sets of ϕ o, and the optimal relative speed of the vehicle is F.
1.2 A.2 Algorithm
The above discussion leads to an algorithm for minimum time path planning, given: y s ,y f ,F,V(x,t). The algorithm comprises of the following two steps.
-
1.
Forward propagation. First, the reachability front \(\partial \mathcal {R}(\mathbf {y}_{s},t)\) is evolved by solving the Hamilton–Jacobi Eq. 6 forward in time, with initial conditions (7). The front is evolved until it reaches y f .
$$ \frac{\partial \phi^{o}}{\partial t} + F | \nabla \phi^{o} | + \mathbf{V}(\mathbf{x},t) \cdot \nabla \phi^{o} = 0~~\text{in}~~{\Omega} \times (0,\infty) \, , $$(6)with initial conditions
$$ \phi^{o}(\mathbf{x},0) = | \mathbf{x} - \mathbf{y}_{s} | \, , \quad \mathbf{x} \in {\Omega} \, . $$(7) -
2.
Backward vehicle tracking. After the front reaches y f , the optimal vehicle trajectory \(\mathbf {X}^{\star }_{P}(\mathbf {y}_{s},t)\) and controls are computed by solving Eq. 5 backward in time, starting from y f at time T ⋆(y f )=T o(y f ), i.e.,
$$\begin{array}{@{}rcl@{}}&\frac{\text{d} \mathbf{X}^{\star}_{P}(\mathbf{y}_{s},t)}{\text{d} t} = - F \frac{\nabla \phi^{o}(\mathbf{X}_{P}^{\star},t)}{| \nabla \phi^{o}(\mathbf{X}_{P}^{\star},t) |}- \mathbf{V}(\mathbf{X}_{P}^{\star},t)\, , \\ &\text{with} \quad \mathbf{X}^{\star}_{P}(\mathbf{y}_{s},{T}^{\star}(\mathbf{y}_{f}) )= \mathbf{y}_{f} \, .\end{array} $$(8)
The backtracking step is necessary in this algorithm since the initial heading direction, \(\hat {\mathbf {h}}^{o}(0)\) is not known a priori. In Lolla et al. (2012) and (2014) , a level set method is used to solve the Hamilton–Jacobi Eq. 6. As a result, efficient schemes such as the narrow-band method (Adalsteinsson and Sethian 1995) can be employed in the numerical scheme. Moreover, level set methods are well-known to offer substantial advantages over front tracking or other particle-based approaches (Sethian 1999; Osher and Fedkiw 2003). A thorough introduction to level set methods may be found in Lolla (2012). Numerical schemes used to solve Eqs. 6–8 are outlined in Lolla et al. (2014).
Rights and permissions
About this article

Cite this article
Lolla, T., Haley, P.J. & Lermusiaux, P.F.J. Time-optimal path planning in dynamic flows using level set equations: realistic applications. Ocean Dynamics 64, 1399–1417 (2014). https://doi.org/10.1007/s10236-014-0760-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10236-014-0760-3