
Abstract
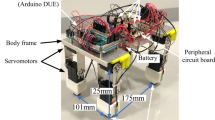
This paper studied about gait pattern changing of the constructed quadruped robot system using pulse-type hardware neural networks (P-HNN). We constructed the 20 cm in size prototype quadruped robot system. Quadruped robot system consisted of mechanical components and electrical components. The mechanical components consisted of four legs, body frames and four servo motors. Quadruped animal-like locomotion could realize by only four servo motors using link mechanisms to each leg. The electrical components consisted of P-HNN, power supply circuit, control board and battery. P-HNN was constructed by analog discrete circuits which could mount on top of the quadruped robot. As a result, constructed P-HNN could output the locomotion rhythms which were necessary to generate the gait pattern of the quadruped robot. P-HNN could output the locomotion rhythms without using software programs or analog digital converter. In addition, P-HNN could change the locomotion rhythms by inputting the trigger pulse to the P-HNN. Our constructed quadruped robot system could perform the locomotion without using external devices.














Similar content being viewed by others

References
Fujita M, Kitano H (1998) Development of an autonomous quadruped robot for robot entertainment. Auton Robots (Kluwer Academic Publishers) 5:7–18
Mcghh RB, Iswandhi GI (1979) Adaptive Locomotion of a Multilegged Robot over Rough Terrain. IEEE Trans Syst Man Cybern 9(2):176–182
Raibert M, Blankespoor K, Nelson G, Playter R, BigDog Team (2008) BigDog, the rough-terrain quadruped robot. In: Proceedings of the 17th world congress. The International Federation of Automatic Control, pp 10822–10825
Habib MK, Watanabe K, Izumi K (2007) Biomimetics robots: from bio-inspiration to implementation. In: Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, pp 143–148
Habib MK (2011) Biomimetcs: innovations and robotics. Int J Mechatron Manuf Syst 4(2):113–134
Kimura H, Fukuoka Y, Konaga K (2001) Adaptive dynamic walking of a quadruped robot using a neural system model. Adv Robot (Taylor & Francis) 15:859–878
Fukuoka Y, Kimura H, Cohen AH (2003) Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts. Int J Robot Res 22(3–4):187–202
Ijspeert AJ (2008) ‘Central pattern generators for locomotion control in animals and robots’: a review. Neural Netw 21(4):642–653
Schilling M, Hoinville T, Schmitz J, Cruse H (2013) Walknet, a bio-inspired controller for hexapod walking. Biol Cybern 107(4):397–419
Schilling M, Paskarbeit J, Hüffmeier A, Schneider A, Schmitz J, Cruse H (2013) A hexapod walker using a heterarchical architecture for action selection. Front Comput Neurosci 7:126. doi:10.3389/fncom.2013.00126
Delcomyn F (1980) Neural basis of rhythmic behavior in animals. Science 210:492–498
Michael AA (2002) The handbook of brain theory and neural networks, 2nd edn. MIT Press, Cambridge
Saito Ken, Ikeda Yuki, Takato Minami, Sekine Yoshifumi, Uchikoba Fumio (2015) Development of quadruped robot with locomotion rhythm generator using pulse-type hardware neural networks. Artif Life Robot 20(4):366–371
Saito K, Saeki K, Sekine Y (2009) Synchronization of coupled pulse-type hardware neuron models for CPG model. In: Proceedings of the 2009 International Joint Conference on Neural Networks, Atlanta, Georgia, USA, pp 2748–2755
Acknowledgments
This study was supported by Nihon University College of Science and Technology Project Research, Nihon University Academic Research Grant (Total research, “14-002”). We appreciate the support.
Author information
Authors and Affiliations
Corresponding author
Additional information
This study was supported by Nihon University College of Science and Technology Project Research, Nihon University Academic Research Grant (Total research, “14-002”). We appreciate the support.
About this article

Cite this article
Tanaka, D., Nagashima, D., Hidaka, T. et al. Gait pattern changing of quadruped robot using pulse-type hardware neural networks. Artif Life Robotics 22, 102–107 (2017). https://doi.org/10.1007/s10015-016-0327-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-016-0327-0