
Abstract
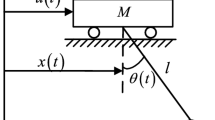
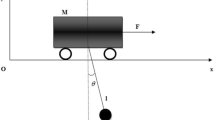
A neural network-based self-tuning controller is presented. The scheme of the controller is based on using a multilayer perceptron, or a set of them, as a self-tuner for a controller. The method proposed has the advantage that it is not necessary to use a combined structure of identification and decision, common in a standard self-tuning controller. The paper explains the algorithm for a general case, and then a specific application on a nonlinear plant is presented. The plant is an overhead crane which involves an interesting control problem related to the oscillations of the load mass. The method proposed is tested by simulation in different conditions. A comparison was made with a conventional controller to evaluate the efficiency of the algorithm.
Similar content being viewed by others

Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Méndez, J., Acosta, L., Moreno, L. et al. An Application of a Neural Self-Tuning Controller to an Overhead Crane. Neural Computing & Applications 8, 143–150 (1999). https://doi.org/10.1007/s005210050016
Published:
Issue Date:
DOI: https://doi.org/10.1007/s005210050016