
Abstract
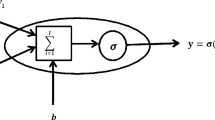
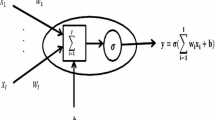
This paper attempts to propose a new method based on capabilities of artificial neural networks, in function approximation, to attain the solution of optimal control problems. To do so, we try to approximate the solution of Hamiltonian conditions based on the Pontryagin minimum principle (PMP). For this purpose, we introduce an error function that contains all PMP conditions. In the proposed error function, we used trial solutions for the trajectory function, control function and the Lagrange multipliers. These trial solutions are constructed by using neurons. Then, we minimize the error function that contains just the weights of the trial solutions. Substituting the optimal values of the weights in the trial solutions, we obtain the optimal trajectory function, optimal control function and the optimal Lagrange multipliers.















Similar content being viewed by others

References
Krabs W, Pickl S (2010) An optimal control problem in cancer chemotherapy. Appl Math Comput 217:1117–1124
Modares H, Naghibi Sistani MB (2011) Solving nonlinear optimal control problems using a hybrid IPSOSQP algorithm. Eng Appl Artif Intell 24:476–484
Kirk DE (2004) Optimal control theory—an introduction. Dover Publications, Mineola, NY
Lewis F, Syrmos VL (1995) Optimal control. Wiley, New York
Hilscher RS, Zeidan V (2012) Hamilton–Jacobi theory over time scales and applications to linear-quadratic problems. Nonlinear Anal 75:932–950
Berkani S, Manseur F, Maidi A (2012) Optimal control based on the variational iteration method. Comput Math Appl 64:604–610
Garg D, Patterson M, Hagera WW, Raoa AV, Bensonb DA, Huntington GT (2010) A unified framework for the numerical solution of optimal control problems using pseudo-spectral methods. Automatica 46:1843–1851
Clever D, Lang J, Ulbrich S, Ziems JC (2010) Combination of an adaptive multilevel SQP method and a space-time adaptive PDAE solver for optimal control problems. Procedia Comput Sci 1:1435–1443
de Oliveira VA, Silva GN, Rojas-Medar MA (2009) KT-invexity in optimal control problems. Nonlinear Anal 71:4790–4797
Gerdts M (2008) A non-smooth Newtons method for control-state constrained optimal control problems. Math Comput Simul 79:925–936
Buldaev AS (2008) Perturbation methods in optimal control problems. Ecol Model 216:157–159
Salama AA (2006) Numerical methods based on extended one-step methods for solving optimal control problems. Appl Math Comput 183:243–250
Zhou YY, Yangb XQ, Teob KL (2006) The existence results for optimal control problems governed by a variational inequality. J Math Anal Appl 321:595–608
Chryssoverghi I, Coletsos I, Kokkinis B (2006) Discretization methods for optimal control problems with state constraints. J Comput Appl Math 191:1–31
England R, Gomez S, Lamourc R (2005) Expressing optimal control problems as differential algebraic equations. Comput Chem Eng 29:1720–1730
Rodriguez A (2004) On the local stability of the solution to optimal control problems. J Econ Dyn Control 28:2475–2484
Saberi Nik H, Effati S, Shirazian M (2012) An approximate-analytical solution for the Hamilton–Jacobi–Bellman equation via homotopy perturbation method. Appl Math Model 36(11):5614–5623
Cheng T, Sun H, Qu Z, Lewis FL (2009) Neural network solution for suboptimal control of non-holonomic chained form system. Trans Inst Measurement Control 31(6):475–494
Cheng T, Lewis FL (2007) Neural network solution for finite-horizon H-infinity constrained optimal control of nonlinear systems. J Control Theory Appl 5(1):1–11
Cheng T, Lewis FL, Abu-Khalaf M (2007) Fixed-final-time-constrained optimal control of nonlinear systems using neural network HJB approach. IEEE Trans Neural Netw 18(6):1725–1737
Vrabie D, Lewis FL (2009) Neural network approach to continuous-time direct adaptive optimal control for partially unknown nonlinear systems. Neural Netw 22:237–246
Lagaris IE, Likas A (2012) Hamilton–Jacobi theory over time scales and applications to linear-quadratic problems. IEEE Trans Neural Netw 9(5):987–1000
Keckman V (2001) Learning and soft computing. MIT press, Cambridge, MA
Rubio JE (1986) Control and optimization, the linear treatment of nonlinear problems. Manchester University Press, Manchester
Shirazian M, Effati S (2012) Solving a class of nonlinear optimal control problems via he’s variational iteration method. Int J Control Automat Syst 10(2):249–256
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Effati, S., Pakdaman, M. Optimal control problem via neural networks. Neural Comput & Applic 23, 2093–2100 (2013). https://doi.org/10.1007/s00521-012-1156-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-012-1156-2