
Abstract
Background
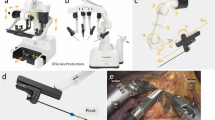
Robot-assisted minimally invasive surgery (MIS) has shown tremendous advances over the traditional technique. However, current commercialized systems are complicated and huge, which vastly raises system cost and requirements for operation room. Central South University in collaboration with Tianjin University developed one domestically produced Chinese minimally invasive surgical (MIS) robot system “Micro Hand S” in 2013. Recently, our center launched the first clinical trials of the robot, including one case of robotic gastric perforation repair and two cases of robotic appendectomy.
Methods
In march 2014, one patient with gastric perforation and two patients with acute appendicitis who underwent robotic perforation repair and robotic appendectomy respectively. In these procedures, we firstly use “Micro Hand S” robot system. All of the patients were followed for 3 months, Total robotic operation time, Intra-operative blood loss and pre- and postoperative changes in routine blood test, liver function test, renal function test and major complications were recorded.
Results
“Micro Hand S” succeeded in accomplishing operations. No intraoperative complications or technical problems were encountered. At a three-month follow-up, patients were found to be progressing well, without evidence of adverse reactions.
Conclusions
The domestic surgical robot system which was verified as safe and effective through these trials. The proposed design method is an effective way to solve some of drawbacks that exist in the former generations of the da Vinci surgical system.





Similar content being viewed by others


References
Guthart GS Salisbury Jr JK (2000) The intuitive telesurgery system: overview and application. Proceedings of the 2000 IEEE international conference on robotics and automation, Apr 24–28. San Francisco, CA, pp 618–621
Freschi C, Ferrari V, Melfi F, Ferrari M, Mosca F, Cuschieri A (2013) Technical review of the da Vinci surgical telemanipulator. Int J Med Robot Comput Assist Surg 9:396–406
Zemiti N, Morel G, Ortmaier T, Bonnet N (2007) Mechatronic design of a new robot for force control in minimally invasive surgery. IEEE-ASME T Mech 12:143–153
Berkelman P, Boidard E, Cinquin P, Troccaz J (2003) LER: the light endoscope robot. Proceeding of the 2003 IEEE/RSJ international conference on intelligent robots and systems, vol. 3, Oct 27–31. Las Vegas, Nevada, pp 2835–2840
Ghodoussi M, Butner SE, Wang YL. (2002) Robotic surgery—the transatlantic case. Proceedings of the IEEE international conference on robotics and automation, vol. 2, May. Washington, DC, pp 1882–1888
Simaan N, Taylaor RH, Flint P (2004) A dexterous system for laryngeal surgery. Proceedings of the IEEE international conference on robotics & automation, vol. 1, Apr 26–May 1. New Orleans, LA, pp 351–357
Intuitive Surgical, Inc. (2014) Investor presentation Q1 2014. http://www.intuitivesurgical.com. Accessed 31 May 2014
Sun LW, Wan MF, Schmid J, Bailly Y, Thakre AA, Yeung CK (2007) Advanced da Vinci surgical system simulator for surgeon training and operation planning. Int J Med Robot Comput Assist Surg 3:245–251
Wang LL, Uecker D, Laby KP, Wilson JD, Jordan CS, Wright JW, Ghodoussi M, Inventor (2006) Medical robotic arm that is attached to an operating table. Intuitive Surgical, United States patent US 7083571, August 1
Acknowledgments
Dr. Shaihong Zhu conceived the experiments, Guohui Wang and Jianmin Li assisted with the experiments, and Zhi Son and Han Su analyzed the data.
Support
China National Natural Science Fund supported this study (No: 51290295).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclosures
The authors Bo Yi, Guohui Wang, Jianmin Li, Juan Jiang, Zhi Son, Han Su and Shaihong Zhu all declare that they have no conflicts of interest or financial ties to disclose.
Rights and permissions
About this article

Cite this article
Yi, B., Wang, G., Li, J. et al. The first clinical use of domestically produced Chinese minimally invasive surgical robot system “Micro Hand S”. Surg Endosc 30, 2649–2655 (2016). https://doi.org/10.1007/s00464-015-4506-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-015-4506-1