
Abstract
Introduction
Triple pelvic osteotomy is known as a surgical option in young patients suffering from severe hip dysplasia. In most patients, implant removal is performed after bony consolidation. Due to the pelvic anatomy, the conventional technique is often associated with soft-tissue damage and high X-ray exposure. Recent developments in the field of computer-assisted surgery may offer new alternatives. The aim of this case report was to investigate the feasibility of a fluoroscopy-supported navigation system for the implant removal after a triple pelvic osteotomy.
Materials and methods
Using the BrainLAB–VectorVision, a fluoroscopy-enhanced navigation system, implants were removed in a 24-year-old female patient 14 months after a triple pelvic osteotomy.
Results
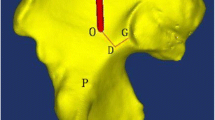
The navigation system showed a high feasibility in the instrument visualisation and implant localisation. The screws could be precisely located, simultaneously in different X-ray planes. The total X-ray exposure time was low, totalling 17 s.
Conclusion
Initial experiences are very promising and show impressively the advantages of fluoroscopy-supported navigation for minimally invasive implant removal. A considerably reduced X-ray exposure for patient and surgeon is possible. The removal of the inserted screw is possible through a stitch incision, with reduced OR trauma and a quicker reconvalescence.




Similar content being viewed by others


References
Grützner P-A, Rose E, Vock B, Holz F, Nolte LP, Wentensen A (2002) Computer-assistierte perkutane Verschraubung des hinteren Beckenrings. Unfallchirurg 105:254–260
Nolte L-P, Slomczykowski M-A, Berlemann U, Strauss M-J, Hofstetter R, Schlenzka D, Laine T, Lund T (2000) A new approach to computer-aided spine surgery: fluoroscopy-based surgical navigation. Eur Spine J 9:S87–S88
Radermacher K, Portheine F, Anton M, Zimolong A, Kaspers G, Rau G, Staudte H-W (1998) Computer assisted orthopaedic surgery with image based individual templates. Clin Orthop 354:28–38
Slomczykowski M-A, Hofstetter R, Burquin I, Nolte L-P, Snyder M (1998) The method of computer assisted orthopedic surgery based on two-dimensional fluoroskopy: the principles of action. Chir Narzadow Ruchu Orthop Pol 63:443–450
Stöckle U, König B, Hofstetter R, Nolte L-P, Haas N-P (2001) Bildwandler-gestützte Navigation. Eine experimentelle Studie zu Beckenverschraubungen. Unfallchirurg 104:215–220
Tönnis D, Behrens K, Tscharani F (1981) A modified technique of the triple pelvic osteotomy: early results. J Pediatr Orthop 1:241–249
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Perlick, L., Tingart, M., Lerch, K. et al. Navigation-assisted, minimally invasive implant removal following a triple pelvic osteotomy. Arch Orthop Trauma Surg 124, 64–66 (2004). https://doi.org/10.1007/s00402-003-0593-x
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00402-003-0593-x