
Abstract
Typically, locomotion has been studied by restricting the animal’s path and/or speed, focusing on stride and step kinematics. Here we incorporate measurements of the legs and trunk in the support and swing phases, during trotting with various speeds and curvatures. This paradigm releases the animal from the confines of the treadmill and runway into the open space. The diagonal step, a new unit of locomotion, is defined by regarding the line between the two supporting diagonal legs as a frame of reference for the description of the dynamics of the virtual line between the two swinging diagonal legs. This analysis reveals that during free trotting the mouse uses three types of steps: fixating, opening, and closing steps. During progression along a straight path, the mouse uses fixating steps, in which the swinging diagonal maintains a fixed direction, landing on the supporting foreleg; during progression along a curved path the mouse uses opening and closing steps alternately. If two steps of the same type are performed sequentially, they engender an abrupt change of direction. Our results reveal how steering with the swinging diagonal, while using a virtually bipedal gait, engenders the whole repertoire of free-trotting behavior.








Similar content being viewed by others


References
Andrews JR, McLeod WD, Ward T, Howard K (1977) The cutting mechanism. Am J Sports Med 5(3):111–121
Bernstein N (1967) The co-ordination and regulation of movements. Pergamon, Oxford
Blickhan R, Full RJ (1993) Similarity in multilegged locomotion: bouncing like a monopode. J Comp Physiol A 173:509–517
Bosco G, Eian J, Poppele RE (2005) Kinematic and non-kinematic signals transmitted to the cat cerebellum during passive treadmill stepping. Exp Brain Res 167(3):394–403
Cheng H, Almstrom S, Gimenez-Llort L, Chang R, Ove Ogren S, Hoffer B, Olson L (1997) Gait analysis of adult paraplegic rats after spinal cord repair. Exp Neurol 148(2):544–557
Cools AR, Scheenen W, Eilam D, Golani I (1989) Evidence that apomorphine and (+)-amphetamine produce different types of circling in rats. Behav Brain Res 34(1–2):111–116
Copp NH, Jamon M (2001) Kinematics of rotation in place during defense turning in the crayfish Procambarus clarkii. J Exp Biol 204(Pt 3):471–486
Courtine G, Schieppati M (2003) Human walking along a curved path. II. Gait features and EMG patterns. Eur J Neurosci 18(1):191–205
Courtine G, Schieppati M (2004) Tuning of a basic coordination pattern constructs straight-ahead and curved walking in humans. J Neurophysiol 91(4):1524–1535
Dickinson MH, Farley CT, Full RJ, Koehl MA, Kram R, Lehman S (2000) How animals move: an integrative view. Science 288(5463):100–106
Domenici P, Jamon M, Clarac F (1998) Curve walking in freely moving crayfish (Procambarus clarkii). J Exp Biol 201(Pt 9):1315–1329
Domenici P, Schmitz J, Jamon M (1999) The relationship between leg stepping pattern and yaw torque oscillations in curve walking of two crayfish species. J Exp Biol 202(Pt 22):3069–3080
Durr V, Ebeling W (2005) The behavioural transition from straight to curve walking: kinetics of leg movement parameters and the initiation of turning. J Exp Biol 208(Pt 12):2237–2252
Eilam D (1994) Influence of body morphology on turning behavior in carnivores. J Mot Behav 26(1):3–12
Eshkol N, Harries JG (2001) EWMN Part I. The Movement Notation Society, Israel
Eshkol N, Wachman A (1958) Movement notation. Weidenfeld & Nicholson, London
Farley CT, Taylor CR (1991) A mechanical trigger for the trot–gallop transition in horses. Science 253(5017):306–308
Full RJ (1989) Mechanics and energetics of terrestrial locomotion: from bipeds to polypeds. In: Wieser W, Gnaiger E (eds) Energy transformations in cells and organisms. Thieme, Stuttgart, pp 175–182
Ganor I, Golani I (1980) Coordination and integration in the hindleg step cycle of the rat: kinematic synergies. Brain Res 195(1):57–67
Golubitsky M, Stewart I, Buono PL, Collins JJ (1999) Symmetry in locomotor central pattern generators and animal gaits. Nature 401(6754):693–695
Gosgnach S, Lanuza GM, Butt SJ, Saueressig H, Zhang Y, Velasquez T, Riethmacher D, Callaway EM, Kiehn O, Goulding M (2006) V1 spinal neurons regulate the speed of vertebrate locomotor outputs. Nature 440(7081):215–219
Hamers FP, Lankhorst AJ, van Laar TJ, Veldhuis WB, Gispen WH (2001) Automated quantitative gait analysis during overground locomotion in the rat: its application to spinal cord contusion and transection injuries. J Neurotrauma 18(2):187–201
Hampton TG, Stasko MR, Kale A, Amende I, Costa AC (2004) Gait dynamics in trisomic mice: quantitative neurological traits of Down syndrome. Physiol Behav 82(2–3):381–389
Hase K, Stein RB (1999) Turning strategies during human walking. J Neurophysiol 81(6):2914–2922
Hein A (1974) Prerequisite for development of visually guided reaching in the kitten. Brain Res 71(2–3):259–263
Hen I, Sakov A, Kafkafi N, Golani I, Benjamini Y (2004) The dynamics of spatial behavior: how can robust smoothing techniques help? J Neurosci Methods 133(1–2):161–172
Herbin M, Gasc JP, Renous S (2004) Symmetrical and asymmetrical gaits in the mouse: patterns to increase velocity. J Comp Physiol A 190(11):895–906
Hildebrand M (1965) Symmetrical gaits of horses. Science 150(697):701–708
Hildebrand M (1976) Analysis of tetrapod gaits: general considerations and symmetrical gaits. In: Herman RM, Grillner S, Stein PS, Stuart DG (eds) Neural control of locomotion. Plenum, New York, pp 203–236
Hildebrand M (1989) The quadrupedal gaits of vertebrates. Bioscience 39:766–776
Jamon M, Clarac F (1997) Variability of leg kinematics in free-walking crayfish, Procambarus clarkii, and related inter-joint coordination. J Exp Biol 200(Pt 8):1201–1213
Jindrich DL, Full RJ (1999) Many-legged maneuverability: dynamics of turning in hexapods. J Exp Biol 202(Pt 12):1603–1623
Kafkafi N, Golani I (1998) A traveling wave of lateral movement coordinates both turning and forward walking in the ferret. Biol Cybern 78(6):441–453
Kafkafi N, Levi-Havusha S, Golani I, Benjamini Y (1996) Coordination of side-to-side head movements and walking in amphetamine-treated rats: a stereotyped motor pattern as a stable equilibrium in a dynamical system. Biol Cybern 74(6):487–495
Kafkafi N, Benjamini Y, Sakov A, Elmer GI, Golani I (2005) Genotype–environment interactions in mouse behavior: a way out of the problem. Proc Natl Acad Sci USA 102(12):4619–4624
Kale A, Amende I, Meyer GP, Crabbe JC, Hampton TG (2004) Ethanol’s effects on gait dynamics in mice investigated by ventral plane videography. Alcohol Clin Exp Res 28(12):1839–1848
Kiriyama K, Warabi T, Kato M, Yoshida T, Kokayashi N (2005) Medial–lateral balance during stance phase of straight and circular walking of human subjects. Neurosci Lett 388(2):91–95
Kullander K, Butt SJ, Lebret JM, Lundfald L, Restrepo CE, Rydstrom A, Klein R, Kiehn O (2003) Role of EphA4 and EphrinB3 in local neuronal circuits that control walking. Science 299(5614):1889–1892
Lanuza GM, Gosgnach S, Pierani A, Jessell TM, Goulding M (2004) Genetic identification of spinal interneurons that coordinate left–right locomotor activity necessary for walking movements. Neuron 42(3):375–386
Leblond H, L’Esperance M, Orsal D, Rossignol S (2003) Treadmill locomotion in the intact and spinal mouse. J Neurosci 23(36):11411–11419
Lee DV, Bertram JE, Todhunter RJ (1999) Acceleration and balance in trotting dogs. J Exp Biol 202(Pt 24):3565–3573
Lepicard EM, Venault P, Abourachid A, Pelle E, Chapouthier G, Gasc JP (2006) Spatio-temporal analysis of locomotion in BALB/cByJ and C57BL/6J mice in different environmental conditions. Behav Brain Res 167(2):365–372
Mead L, Hargreaues E, Galea L (1996) Sex difference in rodents spontaneous activity levels. In: Sanberg P, Ossenkopp KP, Kavaliers M (eds) Motor activity and movement disorders: research issues and applications. Humana, Totowa, pp 111–140
Nielsen DM, Crosley KJ, Keller RW Jr, Glick SD, Carlson JN (1999) Rotation, locomotor activity and individual differences in voluntary ethanol consumption. Brain Res 823(1–2):80–87
Ogura H, Aruga J, Mikoshiba K (2001) Behavioral abnormalities of Zic1 and Zic2 mutant mice: implications as models for human neurological disorders. Behav Genet 31(3):317–324
Pettibone DJ, Hess JF, Hey PJ, Jacobson MA, Leviten M, Lis EV, Mallorga PJ, Pascarella DM, Snyder MA, Williams JB, Zeng Z (2002) The effects of deleting the mouse neurotensin receptor NTR1 on central and peripheral responses to neurotensin. J Pharmacol Exp Ther 300(1):305–313
Schilling N (2005) Ontogenetic development of locomotion in small mammals—a kinematic study. J Exp Biol 208(Pt 21):4013–4034
Schwarting RKW, Fornaguera J, Huston JP (1996) Automated video-image analysis of behavioral asymmetry. In: Sanberg P, Ossenkopp KP, Kavaliers M (eds) Motor activity and movement disorders: research issues and applications. Humana, Totowa, pp 141–174
Strauss R, Heisenberg M (1990) Coordination of legs during straight walking and turning in Drosophila melanogaster. J Comp Physiol A 167(3):403–412
Sumbre G, Fiorito G, Flash T, Hochner B (2005) Neurobiology: motor control of flexible octopus arms. Nature 433(7026):595–596
Szechtman H, Ornstein K, Teitelbaum P, Golani I (1985) The morphogenesis of stereotyped behavior induced by the dopamine receptor agonist apomorphine in the laboratory rat. Neuroscience 14(3):783–798
Vidal PP, Degallaix L, Josset P, Gasc JP, Cullen KE (2004) Postural and locomotor control in normal and vestibularly deficient mice. J Physiol 559(Pt 2):625–638
Walter RM (2003) Kinematics of 90 degrees running turns in wild mice. J Exp Biol 206(Pt 10):1739–1749
Wolfram Research Inc. (2005) Mathematica. Wolfram Research Inc., Champaign
Yakovenko S, McCrea DA, Stecina K, Prochazka A (2005) Control of locomotor cycle durations. J Neurophysiol 94(2):1057–1065
Ziegler MG, Szechtman H (1990) Relation between motor asymmetry and direction of rotational behaviour under amphetamine and apomorphine in rats with unilateral degeneration of the nigrostriatal dopamine system. Behav Brain Res 39(2):123–133
Zimmerberg B, Riley EP, Glick SD (1986) Differential effects of prenatal exposure to alcohol on activity and circling behavior in rats. Pharmacol Biochem Behav 25(5):1021–1025
Zollikofer C (1994) Stepping patterns in ants—influence of speed and curvature. J Exp Biol 192(1):95–106
Acknowledgments
We thank Prof. Mark Shik for his encouragement and critical comments. All animals were maintained in facilities fully accredited by NIH Animal Welfare Assurance Number A5010-01 (TAU). The studies were conducted in accordance with the Guide for Care and Use of Laboratory Animals provided by the NIH ‘Principles of Laboratory Animal Care’ (NIH publication # 86-23, 1996).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Video file (AVI 4,725 kb)
Trot recognition algorithm
The first stage of the algorithm was to identify the support phase of diagonal steps. This was done by calculating the speed of the mid-point of each diagonal in each frame and by recognizing, within each diagonal, segments of complete arrest. In the second stage, the separate sequences of support-swing of the two diagonals were interwoven into a single sequence marking the supporting diagonal for each segment. To sift out frames in which all 4 legs were in contact with the ground, segments in which both diagonals were at arrest were marked as irrelevant; to treat instances in which a leg belonging to one diagonal started to step before the other diagonal stopped, segments in which both diagonals moved were added to the preceding support segment. The support-swing segments obtained at this stage became the candidates for genuine diagonal steps.
The third stage was one of inspection and correction. Step candidates in which 3 or more feet were in contact with the ground for more than 3 frames were marked as irrelevant and discarded. While the legs in the trot gait are expected to release and establish contact 'at the same instant', the 'same instant' is a matter of measurement precision. In light of the level of precision we had, we decided to allow a tolerance of one frame at the start of the step, one frame at the end, and an additional frame for the switch between the heavy diagonals. In addition, step candidates in which the mouse progressed in a non-diagonal manner (such as partial strides of bound or pace) were excluded from the general sequence.
The final stage was the sequence-recognition and edge-correction stage, in which steps identified at the third stage were concatenated into locomotion bouts. In these bouts the mouse trotted continuously. Steps located at the beginning or end of a bout were checked to verify that they were not part of a longer, irregular movement, as when the mouse raises a foreleg, pauses, and only then proceeds with a diagonal step. As in the third stage, we allowed for one frame of tolerance.
For each step, we calculate the difference in the timing of release of contact of the 2 legs that were heavy and become light, and the difference in the timing of establishment of contact of the 2 legs that were light and become heavy. The variance is the squared sum of these differences.
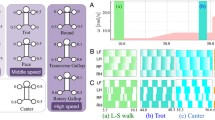
Fig9
Figure S1: Foot-fall Pattern juxtaposed with amount of Shift of Front and trotting variability. This plot depicts the entire sequence of a specific mouse. Black rectangles represent frames in which the corresponding foot was in contact with the ground. The color gradient represents the magnitude of per-step shifts of front, with yellow representing smaller than median (3.5°) values, orange-values between median and upper quartile (8°), red-values between upper quartile and quantile 0.9 (14.2°), dark red- between quantile 0.9 and maximal (38°) values, and white representing frames which were not recognized as trotting steps. The blue line represents the trot variability (see ‘Calculation of trot variability’). The predominance of the checkerboard pattern implies the use of the trot gait throughout different speeds (reflected by the length of black rectangles, i.e., length of support phase), and different curvatures (yellow and red bars). Note that there is no direct correlation between curvature, speed, and trot variability. (JPEG Image 236 kb)
Fig10
Figure S2: The Supporting Diagonal as a system of reference and its graphical representation. (a) A single diagonal step progressing from left to right. The green segment on the supporting diagonal represents the Normalized Intersection Point, with the supporting fore leg defined as zero and the supporting hind leg as one. The green sector between the diagonals represents the Direction of the swinging diagonal. (b) A curve representing the step in A. Each point corresponds to a single frame. Note that the points progress from right to left (towards the fore leg). (JPEG Image 104 kb)
Rights and permissions
About this article
Cite this article
Gruntman, E., Benjamini, Y. & Golani, I. Coordination of steering in a free-trotting quadruped. J Comp Physiol A 193, 331–345 (2007). https://doi.org/10.1007/s00359-006-0187-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-006-0187-5