
Abstract
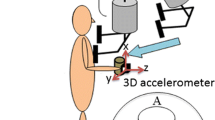
In this experiment we examined the coupling between grip force and load force observed during cyclic vertical arm movements with a hand-held object, performed in different gravitational environments. Six subjects highly experienced in parabolic flight participated in this study. They had to continuously move a cylindrical object up and down in the different gravity fields (1g, 1.8g and 0g) induced by parabolic flights. The imposed movement frequency was 1 Hz, the object mass was either 200 or 400 g, the amplitude of movement was either 20 or 40 cm and an additional mass of 200 g could be wound around the forearm. Each subject performed the task during 15 consecutive parabolas. The coordination between the grip force normal to the surface and the tangential load force was examined in nine loading conditions. We observed that the same normal grip force was used for equivalent loads generated by changes of mass, gravity or acceleration despite the fact that these loads required different motor commands to move the arm. Moreover, our results suggest that the gravitational and inertial components of the load are treated adequately and independently by the internal models used to predictively control the required grip force. These results indicate that the forward internal models used to control precision grip take into account the dynamic characteristics of the upper limb, the object and the environment to predict the object’s acceleration and, in turn, the load force acting at the fingertips.





Similar content being viewed by others


References
Augurelle AS, Penta M, White O, Thonnard JL (2003) The effects of a change in gravity on the dynamics of prehension. Exp Brain Res 148:533–540
Blakemore SJ, Goodbody SJ, Wolpert DM (1998) Predicting the consequences of our own actions: the role of sensorimotor context estimation. J Neurosci 18:7511–7518
Flanagan JR, Burstedt MK, Johansson RS (1999a) Control of fingertip forces in multidigit manipulation. J Neurophysiol 81:1706–1717
Flanagan JR, Johansson RS (2002) Hand movements. In: Ramashandran VS (ed) Encyclopedia of the human brain. Academic Press, San Diego, pp 1–16
Flanagan JR, Nakano E, Imamizu H, Osu R, Yoshioka T, Kawato M (1999b) Composition and decomposition of internal models in motor learning under altered kinematic and dynamic environments. J Neurosci 19:RC34
Flanagan JR, Tresilian JR (1994) Grip-load force coupling: a general control strategy for transporting objects. J Exp Psychol Hum Percept Perform 20:944–957
Flanagan JR, Wing AM (1993) Modulation of grip force with load force during point-to-point arm movements. Exp Brain Res 95:131–143
Flanagan JR, Wing AM (1995) The stability of precision grip forces during cyclic arm movements with a hand-held load. Exp Brain Res 105:455–464
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci 17:1519–1528
Gysin P, Kaminski TR, Gordon AM (2003) Coordination of fingertip forces in object transport during locomotion. Exp Brain Res 149:371–379
Hermsdorfer J, Marquardt C, Philipp J, Zierdt A, Nowak D, Glasauer S, Mai N (1999) Grip forces exerted against stationary held objects during gravity changes. Exp Brain Res 126:205–214
Hermsdorfer J, Marquardt C, Philipp J, Zierdt A, Nowak D, Glasauer S, Mai N (2000) Moving weightless objects. Grip force control during microgravity. Exp Brain Res 132:52–64
Jenmalm P, Johansson RS (1997) Visual and somatosensory information about object shape control manipulative fingertip forces. J Neurosci 17:4486–4499
Johansson RS, Westling G (1984) Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res 56:550–564
Kawato M (1999) Internal models for motor control and trajectory planning. Curr Opin Neurobiol 9:718–727
McIntyre J, Lipshits M, Zaoui M, Berthoz A, Gurfinkel V (2001) Internal reference frames for representation and storage of visual information: the role of gravity. Acta Astronaut 49:111–121
Papaxanthis C, Pozzo T, Popov KE, McIntyre J (1998) Hand trajectories of vertical arm movements in one-G and zero-G environments. Evidence for a central representation of gravitational force. Exp Brain Res 120:496–502
Wolpert DM, Ghahramani Z, Jordan MI (1995) An internal model for sensorimotor integration. Science 269:1880–1882
Wolpert DM, Kawato M (1998) Multiple paired forward and inverse models for motor control. Neural Netw 11:1317–1329
Acknowledgements
The technical assistance of C. Lebègue for the design of the experimental setup is gratefully acknowledged. The authors are grateful to our subjects for their kind participation. This research was supported by a grant from Prodex, OSTC (Belgian Federal Office for Scientific, Technical and Cultural affairs), by the French space agency CNES and by a grant from the ESA, ESTEC Contract 14725/00/NL/JS.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
White, O., McIntyre, J., Augurelle, AS. et al. Do novel gravitational environments alter the grip-force/load-force coupling at the fingertips?. Exp Brain Res 163, 324–334 (2005). https://doi.org/10.1007/s00221-004-2175-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-2175-8