
Abstract
This paper presents a new discrete approach for treating simultaneous, multiple point, indeterminate impact. The proposed approach uses rigid body constraints to address the indeterminacy in the equations of motion with respect to impact forces. The post-collision velocities are determined by exploiting the work–energy relationship and using an energetic coefficient of restitution to model energy dissipation. A new global, or system level, interpretation of the energetic coefficient of restitution is used to resolve the post-collision velocities. An interesting phenomenon observed herein is that a single collision may involve multiple impact events. The well-known example of Newton’s cradle is studied in this work to demonstrate the application of the proposed approach. Simulations are conducted using a three- and five-ball system with different energetic coefficients of restitution for uniform and non-uniform series of spheres. The results obtained in this work are compared to theoretical and experimental results reported in other works.















Similar content being viewed by others
References
Keller, J.: Impact with friction. J. Appl. Mech. 53(1), 1–4 (1986)
Smith, E.: Impact and longitudinal wave transmission. Trans. ASME 77
Newby, N.: Linear collisions with harmonic oscillator forces: the inverse scattering problem. Am. J. Phys. 47(2)
Donahue, C., Hrenya, C., Zelinskaya, A., Nakagawa, K.: Newton’s cradle undone: experiments and collision models for the normal collision of three solid spheres. Phys. Fluids 20(11), 1–11 (2008)
Liu, C., Zhao, Z., Brogliato, B.: Frictionless multiple impacts in multibody systems. I. Theoretical framework. Proc. R. Soc. A, Math. Phys. Eng. Sci. 464(2100), 3193–3211 (2008)
Djerassi, S.: Collision with friction; Part A: Newton’s hypothesis. Multibody Syst. Dyn. 21(1), 37–54 (2009)
Djerassi, S.: Collision with friction; Part B: Poisson’s and Stronge’s hypotheses. Multibody Syst. Dyn. 21(1), 55–70 (2009)
Ceanga, V., Hurmuzlu, Y.: A new look at an old problem: Newton’s cradle. J. Appl. Mech. 68, 575–583 (2001)
Seghete, V., Murphey, T.: Multiple instantaneous collisions in a variational framework. In: Proceedings of the IEEE Conference on Decision and Control, pp. 5015–5020 (2009)
Liu, C., Zhao, Z., Brogliato, B.: Frictionless multiple impacts in multibody systems. II. Numerical algorithm and simulation results. Proc. R. Soc. A, Math. Phys. Eng. Sci. 465(2101), 1–23 (2009)
Brogliato, B.: Nonsmooth Mechanics: Models, Dynamics and Control, 2nd edn. Springer, London (1999)
Wang, Y., Kumar, V., Abel, J.: Dynamics of rigid bodies undergoing multiple frictional contacts. In: Proc-IEEE Int’l Conference on Robotics and Automation, vol. 3, pp. 2764–2769 (1992)
Johansson, L.: A Newton method for rigid body frictional impact with multiple simultaneous impact points. Comput. Methods Appl. Mech. Eng. 191, 239–254 (2001)
Maeda, Y., Oda, K., Makita, S.: Analysis of indeterminate contact forces in robotic grasping and contact tasks. In: IEEE International Conference on Intelligent Robots and Systems, pp. 1570–1575 (2007)
Omata, T., Nagata, K.: Rigid body analysis of the indeterminate grasp force in power grasps. IEEE Trans. Robot. Autom. 16(1), 46–54 (2000)
Rodriguez, A., Bowling, A.: Solution to indeterminate multipoint impact with frictional contact using constraints. Multibody Syst. Dyn. 28(4)
Bedford, A., Fowler, W.: Engineering Mechanics: Dynamics. Pearson Education, Inc., Upper Saddle River (2008)
Stronge, W.: Impact Mechanics. Cambridge Univ. Press, Cambridge (2000)
Han, I., Gilmore, B.: Multi-body impact motion with friction-analysis, simulation, and experimental validation. J. Mech. Des. 115(3), 412–422 (1993)
Flickinger, D., Bowling, A.: Simultaneous oblique impacts and contacts in multibody systems with friction. Multibody Syst. Dyn. 23(3), 249–261 (2010)
Glocker, C., Aeberhard, U.: The geometry of Newton’s cradle. Nonsmooth Mech. Anal., Theor. Numer. Adv. 12(4)
Acknowledgements
This work was partially supported by an NSF grant awarded to the University of Texas at Arlington, as part of the Louis Stokes Alliance for Minority Participation Bridge-to-Doctorate program.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Supplemental data and analysis plots

Case I: (a) Generalized speeds for a three-ball Newton’s cradle, and (b) energy consistency throughout simulation with e ∗=1

Case II: (a) Generalized speeds for a three-ball Newton’s cradle, and (b) energy consistency throughout simulation with e ∗=0.85

Case III: (a) Generalized speeds for a five-ball Newton’s cradle, and (b) energy consistency throughout simulation with e ∗=1

Case IV: (a) Generalized speeds for a five-ball Newton’s cradle, and (b) energy consistency throughout simulation with e ∗=0.8

Case V: (a) Generalized speeds for a non-uniform series, five-ball Newton’s cradle, and (b) energy consistency throughout simulation
Appendix B: Derivation of constraints
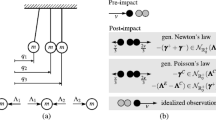
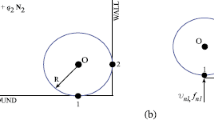
Here, the general form of the velocity constraint is derived based on the theory of rigid body dynamics to address the indeterminacy in (1), as in [16]. The developments given below are for Ball B shown in Fig. 1b. If the mass center of Ball B is point O, then the velocity at this point is known, v O , with respect to the world frame established in Fig. 1a, such that the velocity of points B1 and B2 shown in Fig. 1b are found as
where v OB1 is the relative velocity between points O and B1 and v OB2 is the relative velocity between points O and B2 [17]. Eliminating v O from the relations in (29) yields
If the dot product of the unit direction between impact points B1 and B2 is applied to each side, then
such that the right-hand side of (31) is zero and the rigid body constraint is expressed as
Evaluating the terms involved in this constraint yields
What effect does this velocity constraint have on the force space? It is necessary to examine the dual nature of the velocity and force constraint spaces. Consider
where the term v 5 is constrained, without any loss of generality. Taking the left-inverse of Q yields
The dual nature of the Jacobian also defines a relationship between dependent and independent forces:
which yields
The second expression in (37) is used to solve for F ∗ as
Substituting (38) back into the first relation in (37) reveals the constraint imposed on the forces as
The third and fifth relations in (39) both yield
which is used in Sect. 2.1 to eliminate the dependent force in the three-ball cases, see (4). Note that this process essentially can be stated as
noting that the matrix (Q +)T Q T does not equal the identity matrix. This matrix projects F on the right-hand side of (41) into the space orthogonal to the velocity constraint, which must equal the original F. Technically, any vector of forces in the null space of (Q +)T Q T can be added to the right-hand side and still satisfy (41). However, the development of this solution was based on the existence of left-inverses which only find a single solution. In addition, it is expected that adding constraints to a problem would select a particular single solution. Whether or not multiple solutions exist within the proposed scheme will not be examined here, but will be investigated in future work.
Similarly, force constraints for Balls C and D in the five-ball cases can be determined:
By using Newton’s third law and constraint equations (40), (42) in (43), a force constraint between Balls B, C and Balls B–D can be expressed as
The force constraints (44) and (45) can be applied to a four- and five-ball Newton cradle system, respectively, in the simultaneous, multiple point collision.
Rights and permissions
About this article
Cite this article
Rodriguez, A., Bowling, A. Study of Newton’s cradle using a new discrete approach. Multibody Syst Dyn 33, 61–92 (2015). https://doi.org/10.1007/s11044-013-9406-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-013-9406-3