
Abstract
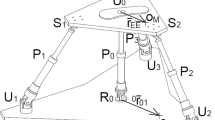
This paper proposes a 3-PPR planar parallel manipulator, which consists of three active prismatic joints, three passive prismatic joints, and three passive rotational joints. The analysis of the kinematics and the optimal design of the manipulator are also discussed. The proposed manipulator has the advantages of the closed type of direct kinematics and a void-free workspace with a convex type of borderline. For the kinematic analysis of the proposed manipulator, the direct kinematics, the inverse kinematics, and the inverse Jacobian of the manipulator are derived. After the rotational limits and the workspaces of the manipulator are investigated, the workspace of the manipulator is simulated. In addition, for the optimal design of the manipulator, the performance indices of the manipulator are investigated, and then an optimal design procedure is carried out using Min-Max theory. Finally, one example using the optimal design is presented.
Similar content being viewed by others


References
Ben-Horin. R., Shoham, M. and Djerassi, S., 1998, “Kinematics, Dynamics and Construction of a Planarly Actuated Parallel Robot,”Robotics and Computer-Integrated Manufacturing, Vol. 14, No. 2, pp. 163–172.
Byun, Y. -K., 1997,Analysis and Design of a 6 Degree of Freedom 3PPS(RRR) P Parallel Manipulator. Ph. D. Dissertation in Korea Advanced Institute of Science and Technology.
Kim, J., Park, F. C., Ryu, S. J., Kim, J., Hwang, J. C., Park, C. and Iurascu, C. C., 2001, “Design and Analysis of a Redundantly Actuated Parallel Mechanism for Rapid Machining,”IEEE Transactions on Robotics and Automation, Vol. 17, No. 4, pp. 423–434.
Lee, J. H., Yi, B. -J., Oh, S. -R. and Suh, I. H., 2001, “Optimal Design and Development of a Five-Bar Finger with Redundant Actuation,”Mechatronics, Vol. 11, pp. 27–42.
Lee, S. H., Yi. B. J. and Kwak, Y. K., 1996, “Optimal Dynamic Design of Anthropomorphic Robot Module with Redundant Actuators,”KSME International Journal, Vol. 10, No. 3, pp. 265–276.
Liu, X. -J., Jin. Z. -L. and Gao, F., 2000, “Optimal Design of a 3-DOF Spherical Parallel Manipulators with Respect to the Conditioning and Stiffness Indices,”Mechanism and Machine Theory, Vol. 35, pp. 1257–12670.
Merlet, J.-P., 1996, “Direct Kinematics of Planar Parallel Manipulators,”Proceedings of the 1996 IEEE International Conference on Robotics and Automation, Minneapolis, Minnesota, pp. 3744–3749.
Merlet, J. -P., 2000,Parallel Robots. Kluwer Academic Publishers.
Nakamura, Y.. 1991,Advanced Robotics Redundancy and Optimization. Addison-Wesley Publishing Company.
Ryu, J. W., Gweon, D. -G. and Moon, K. S., 1997, “Optimal Design of a Flexure Hinge Based XY θ Wafer Stage,”Precision Engineering, Vol. 21, pp. 18–28.
Terano, T., Asai, K. and Sugeno, M., 1992,Fuzzy systems theory and its applications, 1st ed. San Diego, Harcourt Brace Jovanovitch.
Wang, Z., Wang, Z., Liu, W. and Lei, Y., 2001, “A Study on Workspace, Boundary Workspace Analysis and Workpiece Positioning for Parallel Machine Tools,”Mechanism and Machine Theory, Vol. 36, pp. 605–622.
Yi, B. J. and Kim. W. K., 1994, “Optimal Design of a Redundantly Actuated 4-Legged Six Degree of Freedom Parallel Manipulator Using Composite Design Index,”KSME International Journal, Vol. 8, No. 4, pp. 385–403.
Yoshikawa, T., 1990,Foundations of Robotics Analysis and Control, The MIT Press Cambridge, Massachusetts London, England.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Choi, KB. Kinematic analysis and optimal design of 3-PPR planar parallel manipulator. KSME International Journal 17, 528–537 (2003). https://doi.org/10.1007/BF02984454
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/BF02984454