
Abstract
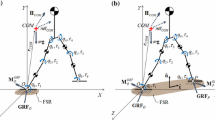
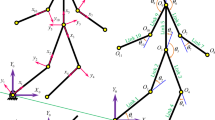
An optimal motion planning of a free-falling cat based on the spline approximation is investigated. Nonholonomicity arises in a free-falling cat subjected to nonintegrable velocity constraints or nonintegrable conservation laws. The equation of dynamics of a free-falling cat is obtained by using the model of two symmetric rigid bodies. The control of the system can be converted to the motion planning problem for a driftless system. A cost function is used to incorporate the final errors and control energy. The motion planning is to determine control inputs to minimize the cost function and is formulated as an infinite dimensional optimal control problem. By using the control parameterization, the infinite dimensional optimal control problem can be transformed to a finite dimensional one. The particle swarm optimization (PSO) algorithm with the cubic spline approximation is proposed to solve the finite dimension optimal control problem. The cubic spline approximation is introduced to realize the control parameterization. The resulting controls are smooth and the initial and terminal values of the control inputs are zeros, so they can be easily generated by experiment. Simulations are also performed for the nonholonomic motion planning of a free-falling cat. Simulated experimental results show that the proposed algorithm is more effective than the Newtoian algorithm.
Similar content being viewed by others
References
Marey M. Des mouvements que certains animaux exécutent pour retomber sur leurs pieds, lorsqu’ils sont précipités d’un lieu élevé. Comp Rend Acad Sci Paris, 1984, (119): 714–717; Guyon M. Note relative à la communication de M. Marey. Comp Rend Acad Sci Paris, 1984, (119): 717–718; Liu Y Z. On the turning motion of a free-falling cat (in Chinese). Acta Mech Sin, 1982, 14 (4): 388–393
McDonald D A. How dose a falling cat turn over. Am J Physiol, 1955, 129: 34–35
Лойцянский Л Г, Лурье А И. Курс Теоретичес Коймеханики. Москва: Гостехиэдат, 1954
Kane T R, Scher M P. A dynamical explanation of the falling cat phenomenon. Int J Solids Struct, 1969, 5(7): 663–670
Brockett R W, Dai L. Nonholonomic kinematics and the role of elliptic functions in constructive controllability. Li Z, Canny J F, eds. Nonholonomic Motion Planning. Norwell, Massachusetts: Kluwer, 1993. 1–22
Murray R M, Sastry S S. Nonholonomic motion planning: Steering using sinusoids. IEEE Trans Automatic Control, 1993, 38(5): 700–716
Reyhanoglu M. A general nonholonomic motion planning strategy for Caplygin systems. In: Proceedings of the 33rd IEEE Conference on Decision and Control. Florida, USA, 1994. 2964–2966
Mukherjee R, Anderson D P. A Surface integral approach to the motion planning of nonholonomic systems. ASME J Dyn Syst Measur Control, 1994, 116(9): 315–325
Fernandes C, Gurvits L, Li Z. Near-optimal nonholonomic motion planning for a system of coupled rigid bodies. IEEE Trans Automation Control, 1995, 39(3): 450–464
Yih C C, Ro P I. Near-optimal motion planning for nonholonomic systems using multipoint shooting method. In: Proc. IEEE Conf. Robotics and Automation, Minneapolis, M N, 1996. 2943–2948
Yih C C, Ro P I. Near-optimal motion planning for nonholonomic systems with state/input constraints via quasi-Newton method. In: Proc. IEEE Conf. Robotics and Automation, Albuquerque, New Mexico, 1997. 1430–1435
Duleba I, Sasiadek J Z. Nonholonomic motion planning based on newton algorithm with energy optimization. IEEE Trans Control Syst Tech, 2003, 11(3): 355–363
Tsuchiya K, Urakubo T, Tsujita K. Motion control of a nonholonomic systems based on the Lyapunov control method. J Guidance Control Dyn, 2002, 25(2): 285–290
Ge X S, Chen L Q. Optimal control of nonholonomic motion planning for a free-falling cat. Appl Math Mech, 2007, 28(5): 601–607
Murray R M, Li Z, Sastry S S. A Mathematical Introduction to Robotic Manipulation. CRC Press, 1994
Burden R L, Faires J D. Numerical Analysis. 7th ed. Beijing: Higher Education Press and Thomson Learning, 2001
Joshi M C, Moudgalya K N. Optimization Theory and Practices. Harrow, U. K.: ASI Ltd., 2004
Ge X S, Chen L Q, Liu Y Z. Nonlinear attitude control of an underactuated spacecraft using wavelet approximate method. Prog Nat Sci, 2006, 17(8): 868–873
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ge, X., Guo, Z. Nonholonomic motion planning for a free-falling cat using spline approximation. Sci. China Phys. Mech. Astron. 55, 2100–2105 (2012). https://doi.org/10.1007/s11433-012-4891-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11433-012-4891-6